用OpenCV实现八种不同的目标跟踪算法
极市平台是专业的视觉算法开发和分发平台,加入极市专业CV交流群,与6000+来自腾讯,华为,百度,北大,清华,中科院等名企名校视觉开发者互动交流!更有机会与李开复老师等大牛群内互动!
同时提供每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。点击文末“阅读原文”立刻申请入群~
来源:论智
编者按:目标跟踪作为机器学习的一个重要分支,加之其在日常生活、军事行动中的广泛应用,很多国内外学者都对此颇有研究。本文将讨论OpenCV上八种不同的目标追踪算法。
虽然我们熟知的的质心追踪器表现得很好,但它需要我们在输入的视频上的每一帧运行一个目标探测器。对大多数环境来说,在每帧上进行检测非常耗费计算力。
所以,我们想应用一种一次性的目标检测方法,然后在之后的帧上都能进行目标追踪,使这一任务更加快速、更高效。
这里的问题是:OpenCV能帮我们达到这种目标追踪的目的吗?
答案是肯定的。
OpenCV目标跟踪
首先,我们会大致介绍八种建立在OpenCV上的目标检测算法。之后我会讲解如何利用这些算法进行实时目标追踪。最后,我们会比较各个OpenCV目标追踪的效果,总结各种方法能够适应的环境。
八种OpenCV目标追踪安装
无人机拍摄的视频,用MedianFlow进行目标追踪
你可能会惊讶OpenCV竟然有八种不同的目标追踪工具,他们都可以运用到计算机视觉领域中。
这八种工具包括:
BOOSTING Tracker:和Haar cascades(AdaBoost)背后所用的机器学习算法相同,但是距其诞生已有十多年了。这一追踪器速度较慢,并且表现不好,但是作为元老还是有必要提及的。(最低支持OpenCV 3.0.0)
MIL Tracker:比上一个追踪器更精确,但是失败率比较高。(最低支持OpenCV 3.0.0)
KCF Tracker:比BOOSTING和MIL都快,但是在有遮挡的情况下表现不佳。(最低支持OpenCV 3.1.0)
CSRT Tracker:比KCF稍精确,但速度不如后者。(最低支持OpenCV 3.4.2)
MedianFlow Tracker:在报错方面表现得很好,但是对于快速跳动或快速移动的物体,模型会失效。(最低支持OpenCV 3.0.0)
TLD Tracker:我不确定是不是OpenCV和TLD有什么不兼容的问题,但是TLD的误报非常多,所以不推荐。(最低支持OpenCV 3.0.0)
MOSSE Tracker:速度真心快,但是不如CSRT和KCF的准确率那么高,如果追求速度选它准没错。(最低支持OpenCV 3.4.1)
GOTURN Tracker:这是OpenCV中唯一一深度学习为基础的目标检测器。它需要额外的模型才能运行,本文不详细讲解。(最低支持OpenCV 3.2.0)
我个人的建议:
如果追求高准确度,又能忍受慢一些的速度,那么就用CSRT
如果对准确度的要求不苛刻,想追求速度,那么就选KCF
纯粹想节省时间就用MOSSE
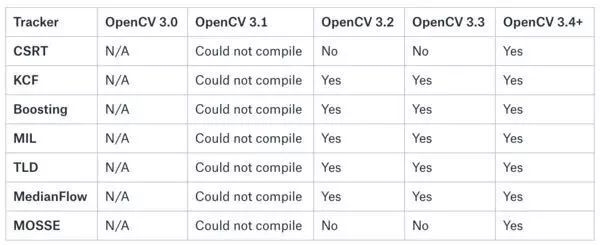
从OpenCV 3开始,目标检测器得到了快速发展,下表总结了不同版本的OpenCV中可食用的追踪器:
开始动手
想要用OpenCV进行目标追踪,首先打开一个新文件,将它命名为opencv_object_tracker.py,然后插入以下代码:

我们开始输入必须的安装包,确保你已经安装了OpenCV(我推荐3.4以上的版本),其次你要安装imutils:

输入安装包后,我们开始分析命令行参数:
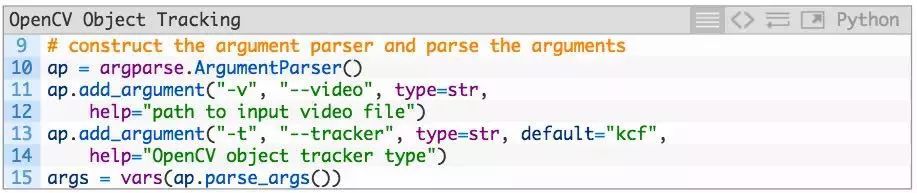
我们的命令行参数包括:
--video:到达输入视频文件的替代路线。如果该参数失效,那么脚本将会使用你的网络摄像头。
--tracker:假设默认追踪器设置的是kcf,一整列可能的追踪器代码表示下一个代码块或下方的部分。
让我们处理追踪器的不同类别:
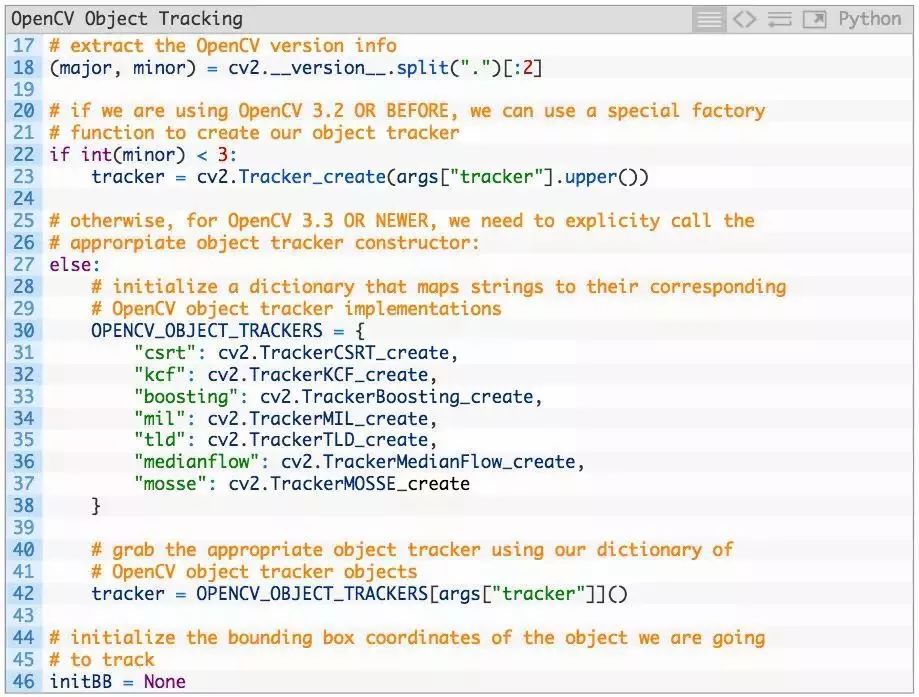
图2中我们提到,并不是所有追踪器都使用OpenCV 3以上的版本。在3.3版本上,同样发生了安装上的变化,在3.3之前,追踪器必须用cv2. Tracker_create创造,并且要在追踪器的名字上用大写字符串标注(22和23行)。
对于3.3以上的版本,每个追踪器可以用各自的函数创造,如cv2. TrackerKCF_create。词典OPENCV_OBJECT_TRACKERS包含了7种OpenCV的目标追踪器(30—38行)。它将目标追踪器的命令行参数字符串映射到实际的OpenCV追踪器函数上。
其中42行里的tracker目的是根据追踪器命令行参数以及从OPENCV_OBJECT_TRACKERS得来的相关重要信息。
注意:这里我没有将GOTURN加入到追踪器设置中因为它还需要额外的模型文件。
我们还对initBB进行初始化(46行),当我们用鼠标选中目标物体时,该变量会显示目标物体的边界框坐标。
接下来,让我们对视频流和FPS进行初始化:
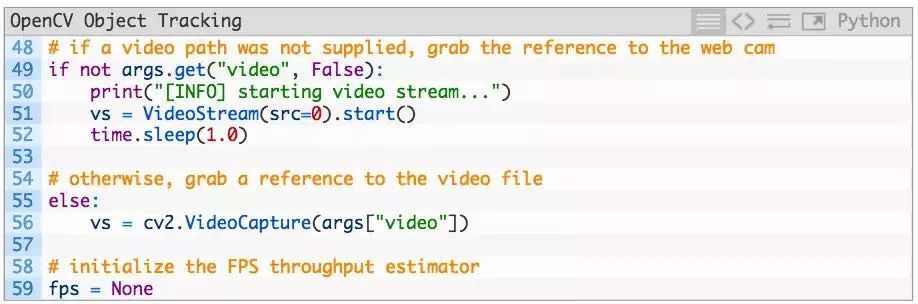
49—52行是访问网络摄像头的步骤,这里我们设定一个一秒钟的暂停时间,好让摄像头传感器进行“热身”。
接着--video命令行参数会出现,所以我们可以从视频文件中对视频流进行初始化(55—56行)。
下面是从视频流中进行帧数迭代循环的步骤:
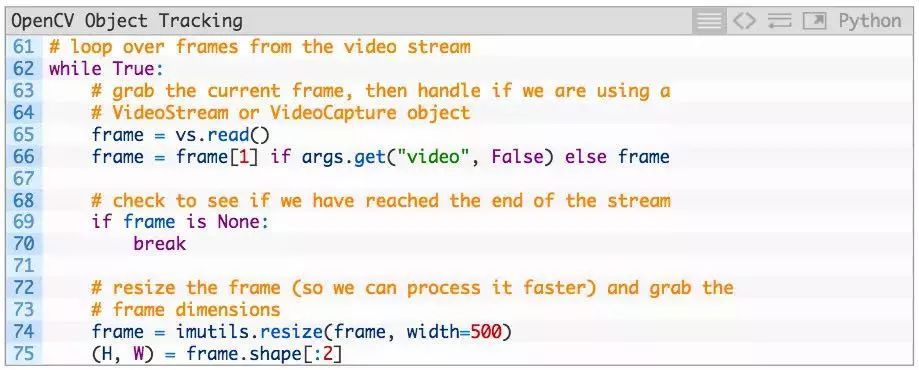
在65和66行中我们提取一个frame,同时在69和70行处理视频文件中没有帧数的情况。
为了让我们的算法处理帧数的速度更快,我们用resize将输入的视频帧调整为50像素(74行),这里处理的数据越少,速度就会越快。
之后,我们提取视频帧的宽度和高度,之后我们会用到高度(75行)。
目标物体选定之后,我们就可以用以下代码进行处理:
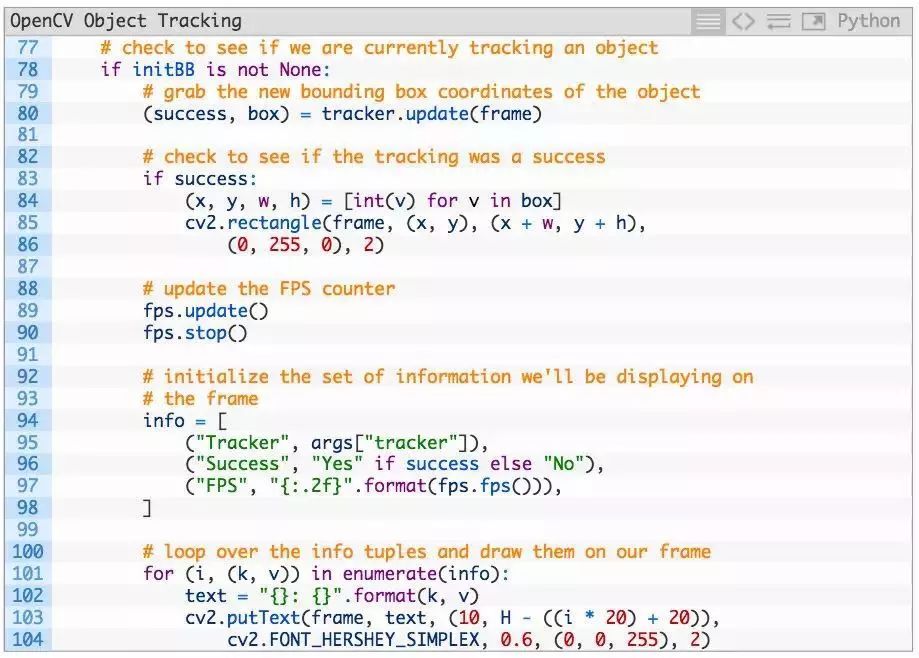
如果目标物体已经被选定,我们需要不断更新目标物体的位置,为了做到这一点,我们在80行使用update方法,它会定位目标物体的新位置并且返回一个success和box值。
如果顺利的话,我们可以在frame中得到更新后的边界框位置。注意,追踪器可能会跟丢目标物并且报错,所以success可能不会一直是True。接着更新FPS估计器。
接着,让我们展示一下frame,以及用鼠标选取目标物体:
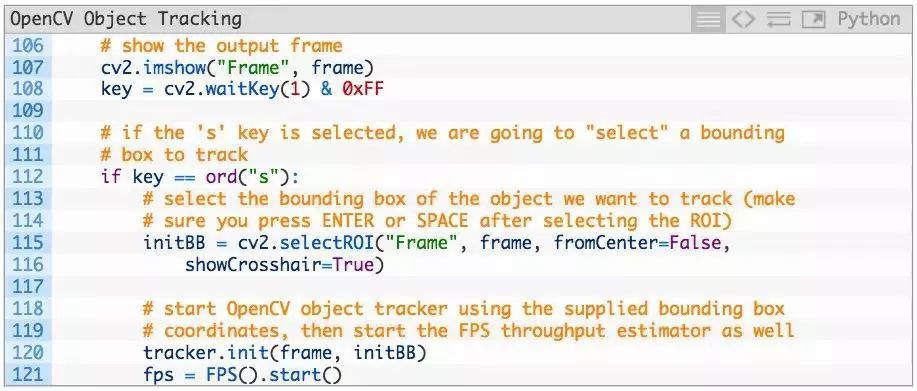
我们将展示frame,并且继续迭代循环,键入其他指令才会停止。
当键入“s”后,我们用cv2.selectROI“选择”一个目标ROI。这一函数可以让你在视频暂停的时候手动选择一个ROI:
用户必须画出边界框后按回车或空格键来确定所选区域。如果你需要重新选择,就按“ESCAPE”键。
同样,我们还能用真实的目标探测器来进行手动选择。
最后,如果视频有更多的帧,或者出现了“quit”的情况,如何退出这一循环:
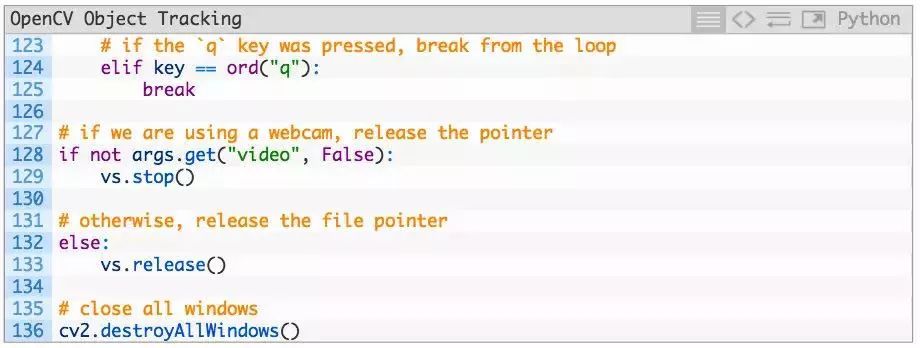
最后一个模块展示了我们如何停止循环,这时所有的指标都输出并且窗口关闭。
目标追踪结果
提示:为了确保你跟上本文的进度,并且用到了文章中的OpenCV方法,请先确保你在“下载资料”中下载了代码和视频。
之后,打开一个终端并执行以下命令:

如果你下载了本教程的源代码和视频,那么--video的可用参数在以下文件中:
american_pharoah.mp4
dashcam_boston.mp4
drone.mp4
nascar_01.mp4
nascar_02.mp4
race.mp4
……
--tracker中的参数在:
csrt
kcf
boosting
mil
tld
medianflow
mosse
你也可以用计算机的摄像头:

下面的实例会展示OpenCV的追踪器如何在较长一段时间中进行追踪,以及与短时间片段进行对比:
总结
这篇文章讲解了如何用OpenCV进行目标物体追踪。具体来说,我们回顾了库里的八种算法:
CSRF
KCF
Boosting
MIL
TLD
MedianFlow
MOSSE
GOTURN
我们可以将OpenCV的这八种追踪器用于不同的任务,包括短跑比赛、赛马、赛车、无人机追踪等高速视频上。如需要文中的代码和视频,请点击下方原文地址获取。
原文地址:
http://www.pyimagesearch.com/2018/07/30/opencv-object-tracking/
*推荐阅读*
ECCV 2018 | CornerNet:目标检测算法新思路
干货|王蒙蒙 基于计算机视觉的目标跟踪算法概览
每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。点击左下角“阅读原文”立刻申请入群~






