被拉格朗日力学支配的神经网络
加入极市专业CV交流群,与6000+来自腾讯,华为,百度,北大,清华,中科院等名企名校视觉开发者互动交流!更有机会与李开复老师等大牛群内互动!
同时提供每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。关注 极市平台 公众号 ,回复 加群,立刻申请入群~
作者:hahakity
链接:https://zhuanlan.zhihu.com/p/90126722 本文已由作者授权转载,未经允许,不得二次转载
-
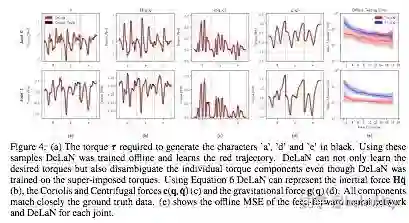
正问题:已知机器人各个关节处电机的驱动力,预测机械臂最终到达的位置,动量和加速度。 -
逆问题:为了将机械臂移动到指定位置且拥有指定的动量和加速度( 比如想以某个角度某种力度打脸),机器人各个关节处电机驱动力需要如何分配。
-
柔性关节,关节之间用弹簧或绳子连接,而弹性系数并无数值 -
流体身躯,体内有半满的液体,内部质量分布随身躯的姿态而变化 -
摩擦力 -
关节之间存在静摩擦力与动摩擦力 -
脚底与地面之间存在静摩擦力与动摩擦力
文章公式简介
1. 正问题和逆问题的数学表达式:
2. 拉格朗日
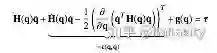
3. 非守恒力的拉格朗日方程



参考文献
[1] https://pybullet.org/wordpress/
[2] https://openreview.net/forum?id=BklHpjCqKm
参考文献 2 是开放评审的 Referee report 和 Reply,大部分评审员对这篇文章持积极正面意见。
文章截图
-End-
CV细分方向交流群
添加极市小助手微信(ID : cv-mart),备注:研究方向-姓名-学校/公司-城市(如:目标检测-小极-北大-深圳),即可申请加入目标检测、目标跟踪、人脸、工业检测、医学影像、三维&SLAM、图像分割等极市技术交流群(已经添加小助手的好友直接私信),更有每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流,一起来让思想之光照的更远吧~

△长按添加极市小助手

△长按关注极市平台
觉得有用麻烦给个在看啦~

登录查看更多
相关内容




相关VIP内容
相关资讯
相关论文