【紫冬分享】小海豚跑偏了?路径跟踪控制一下!




(咳咳~此处为30秒贴小广告时间)
问:如何Pick我的端午彩蛋?
答:三步走起!
第一步:长按识别下方二维码,完成问卷调查(30秒轻松搞定)
第二步:把完成的页面截图发送至后台
第三步:安心等着紫冬君翻牌子吧~(翻牌数量就看表现咯)

我们不送粽子,当然也不送龙舟,我们送(......),请充分发挥你的想象,下期推文见!
Ding~转学霸频道

今日聚焦
基于机器海豚研究平台,自动化所提出了一种基于滑模模糊控制器的路径跟踪控制算法来验证新型平台下的跟踪性能。
海豚,被称为海中灵魂。是世界上最聪明的海洋生物,依靠身体脊椎和尾鳍的上下拍动产生强劲的动力,其流线型的身体降低在水中的阻力,最大游动速度可达11 m/s,推进效率高达75%-90%,并能实现高速转向。海豚的游动性能是人类现有水下航行器所无法比拟的。

"能者为师",以海豚等鲸豚类为仿生对象进行仿生机器海豚的研究,为探究新型的水下航行器提供新思路、新技术、新方法。本文在机器海豚研究平台基础上,提出了一种基于滑模模糊控制器的路径跟踪控制算法来验证新型平台下的跟踪性能。
以虎鲸为仿生对象搭建仿生机器海豚样机平台,如图1所示。采用流线外形设计减小游动阻力,其转向机制依靠身体左右鳍状肢的差动拍动,鳍状肢机构采用数字舵机驱动,并依靠一对1:2的锥齿轮扩展其活动范围。 腰关节与尾关节采用伺服电机驱动,两者协调配合进行背腹式的拍动从而产生推进力。
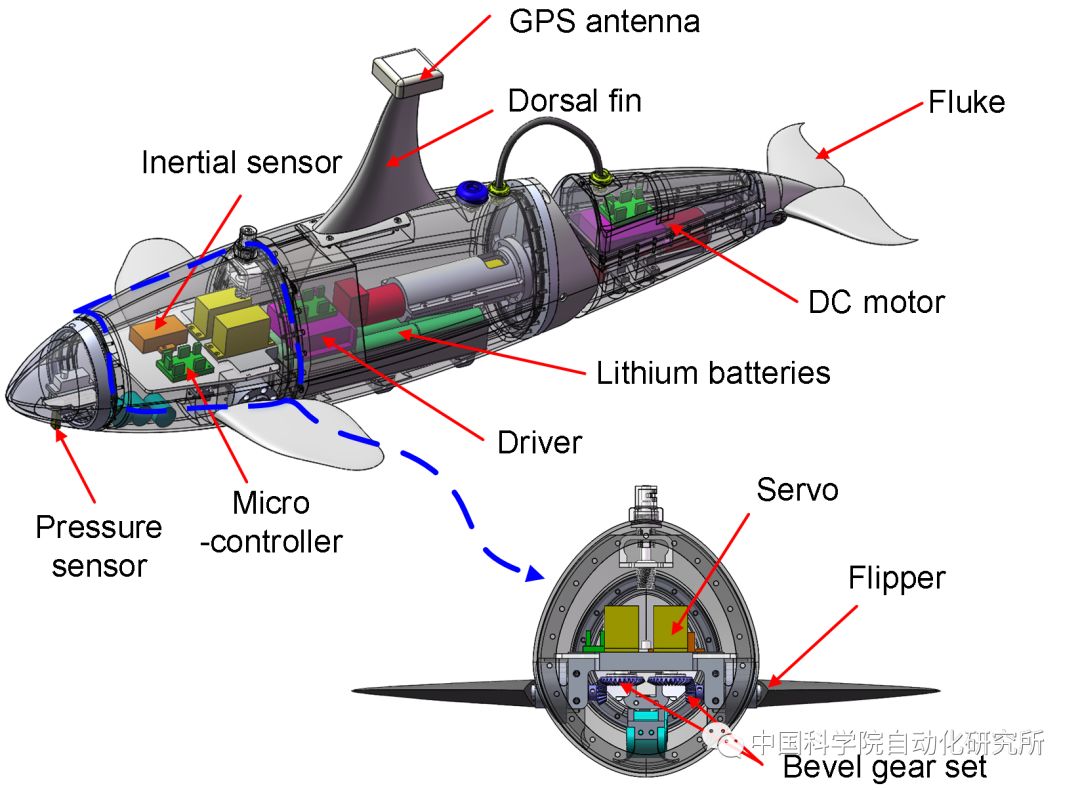
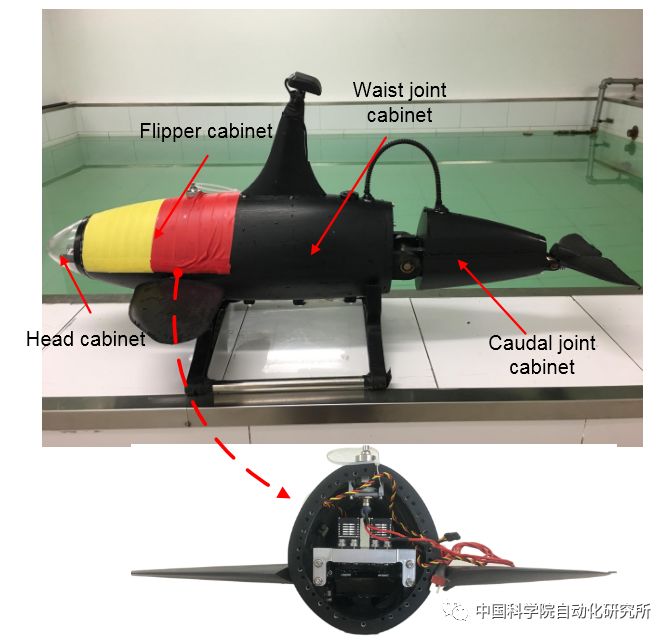
图1 仿生机器海豚平台 (上图); 机械设计图样机(下图)
采用视线法将平面路径跟踪问题转换为对目标航向角跟踪问题,基于目标航向角与当前航向角的偏转误差设计滑模控制器,滑模控制算法根据系统当前的状态有目的地变化,迫使系统状态从超平面之外向切换超平面收束,系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统原点,具有快速响应、对应参数变化及扰动不灵敏等优点,非常适合水下机器人的控制。
通过滑模控制器计算其偏转力矩,由于偏转力矩与鳍状肢偏转角并非是线性关系,因此采用模糊映射的方式将机器海豚的偏转力矩映射到机器海豚的鳍状肢偏转上,鳍状肢的偏转方式有三种,如图2所示。将力矩以及力矩的变化映射到这三种拍动方式上,实现最终的路径跟踪。
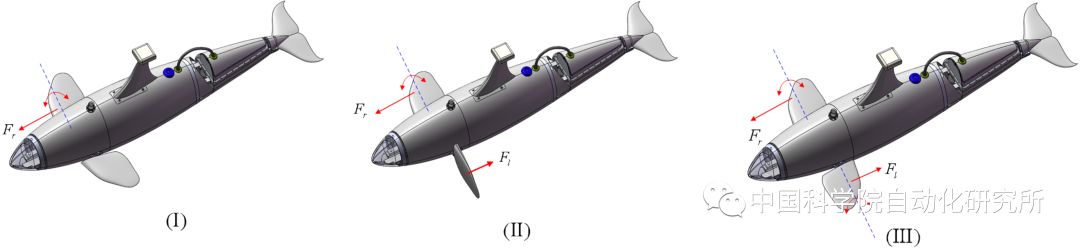
图2 鳍状肢的偏转方式
在室内进行路径跟踪策略的验证实验,其中室内全局摄像头实时提供机器海豚的位置信息,路径跟踪实验结果如图3所示,在整个实验过程中,其航向角跟踪与横向跟踪误差如图4所示。
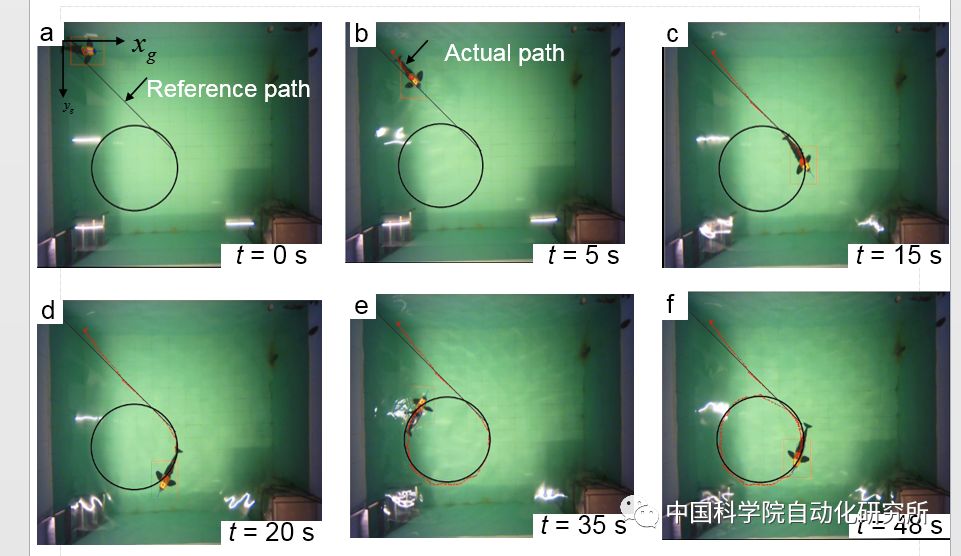
图3 路径跟踪视频序列图
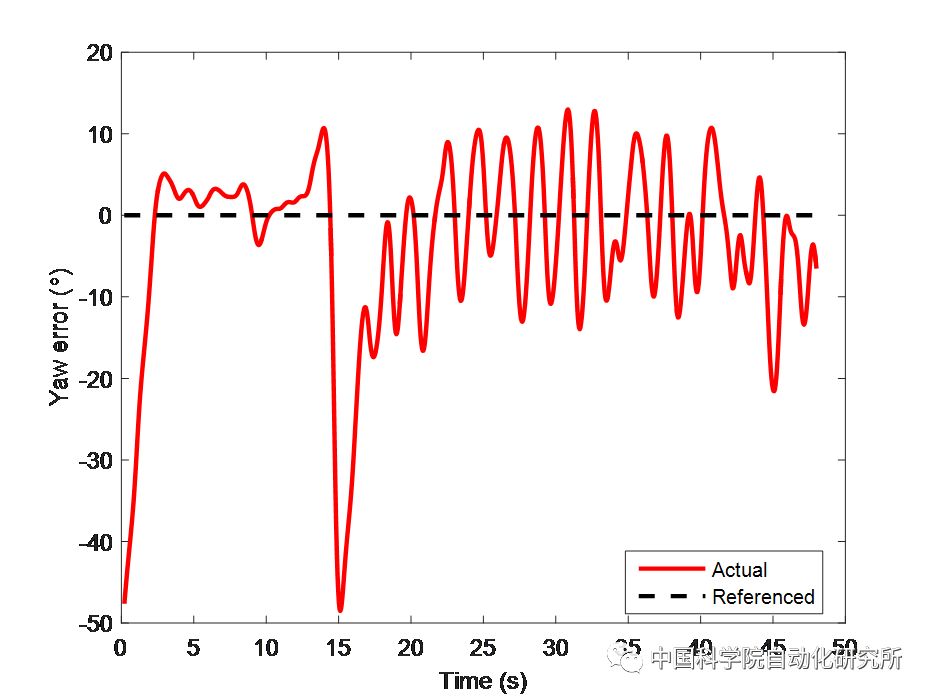
(a)航向角跟踪误差
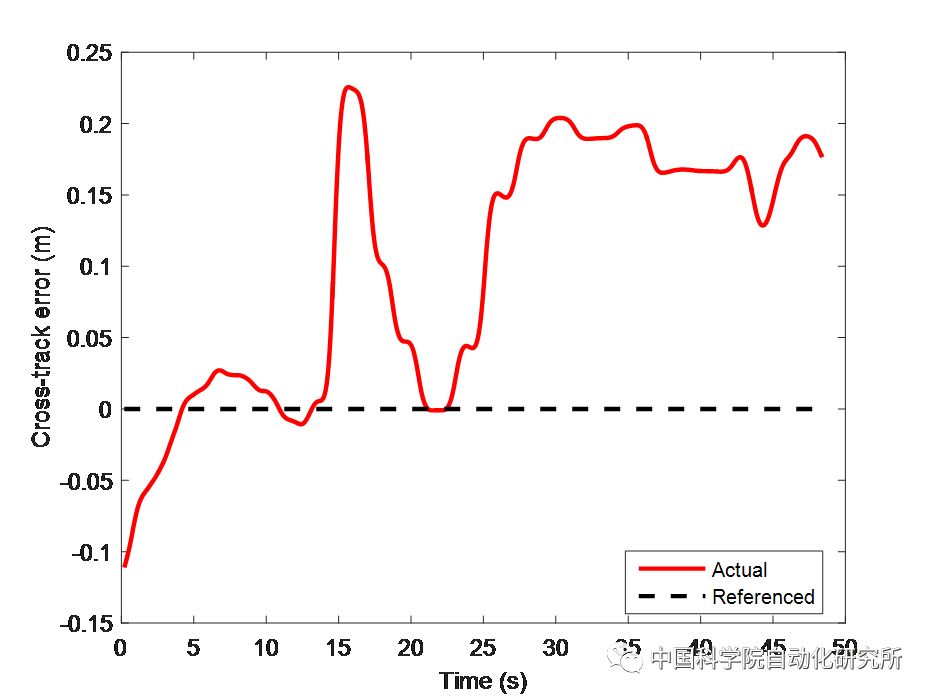
(b)横向跟踪误差
图4 路径跟踪实验结果
实验结果表明所提的控制策略能够有效的跟踪预定轨迹,在整个跟踪过程中,机器海豚对直线路径跟踪的航向角均方根误差为2.43°,横向跟踪均方根误差为1.6 cm,而对圆弧路径跟踪的航向角均方根误差为8.78°,横向跟踪均方根误差为17 cm,表明在对直线的跟踪效果要优于对圆弧的跟踪效果,因为实时变化的目标航向角要求机器海豚具有更好的稳定性。
通过抗干扰实验来进一步验证该策略的鲁棒性,在视频中可以看到,当机器海豚稳定在目标路径上后,通过外力驱使它偏离预定路径,发现其最终又稳定在目标路径上,验证了该策略的有效性。

作者简介:
刘金存,中国科学院自动化研究所复杂系统管理与控制国家重点实验室在读博士,师从喻俊志研究员。荣获第一届紫牛会论坛学术沙龙环节"最佳汇报人"称号,其汇报论文Sliding model fuzzy control-based path-following control for a dolphin robot发表于SCI期刊《SCIENCE CHINA Information Sciences》。

更多精彩内容,欢迎关注
中科院自动化所官方网站:
http://www.ia.ac.cn
欢迎后台留言、推荐您感兴趣的话题、内容或资讯,小编恭候您的意见和建议!如需转载或投稿,请后台私信。
作者:刘金存
编辑:鲁宁、欧梨成


中科院自动化研究所
微信:casia1956
欢迎搭乘自动化所AI旗舰号!



