自动驾驶的根本挑战:人类意图识别与人-车博弈难题|厚势

厚势按:罗德尼·布鲁克斯(Rodney Brooks)是 Rethink Robotics 公司的创始人和董事长,也是 iRobot 公司的联合创始人。日前他发表了署名文章,指出自动驾驶汽车在理解人类意图时的缺陷,这也是谷歌自动驾驶项目前负责人克里斯·乌莫森(Chris Urmson)眼中的「无人驾驶汽车的根本挑战」(the fundamental challenge for driverless cars)。
若对人类意图识别不准确,若显得过于保守,则会蠢哭行人和其他车主;若行车行为过于粗鲁,则会惹怒后者。此外,首批购买自动驾驶汽车的人会以损害公众利益的代价来滥用自动驾驶汽车。
即便识别准确,人与车之间所进行的是动态博弈。而博弈论(Game Theory)的精髓便在于,己方做出决策之前需要预先考虑到对方的反应,由此而引发的问题就是——只要有人参与,人应对自动驾驶汽车的方式就会不断地改变,即人与车之间的博弈规则一直在改变,自动驾驶汽车可能便会显得无所适从。
笔者认为,解决这一难题的方法或许有两种,一是将有人驾驶汽车逐步排除出交通系统,二是定期通过 OTA 的方式在线升级自动驾驶汽车的控制系统,以改进识别人类意图的数学模型。
1969 年,为新兴的阿帕网(ARPANET)建造路由器的工程师从未想过网络技术有一天会改变全人类的生活方式。也没有人想到,蜂窝移动通信会造成人们在餐桌上的只顾低头玩手机而不相互说话交流。类似地,电子邮件的早期用户没听过垃圾邮件,亨利·福特也没有预见到交通堵塞。
新技术往往会产生意想不到的后果,有时它们影响很大甚至会造成混乱,所以事先预想到并提前处理这些问题变得很有意义,就像《人类简史》和《未来简史》的作者尤瓦尔·赫拉利所说的:「预见是为了避免」。
当下最热门的新技术无疑是自动驾驶汽车。自动驾驶汽车的广泛使用是否会产生意想不到的后果?答案是:肯定有!目前能预想到的有两种:
一是自动驾驶汽车会遭到人们的鄙视;
二是这类车的车主会有令人讨厌的行为。
这两个问题会在全自动驾驶汽车上市后的几个月或几年内出现。在那之前,工程师们有大量研发和测试工作要做,以使汽车更安全、功能更强大、操作更简单,并说服监管机构允许它们上路行驶。需要指出的是,实现上述目标所要耗费的时间要比支持拥护自动驾驶汽车的人所预想的要长的多。
我相信,我们最终会迎来全自动驾驶汽车。但作为一名机器人领域的研究人员和企业家,我所担心的是,在试验部署期间,我们会遇到许多意想不到的后果,从而将大规模部署自动驾驶汽车的时间表推迟数年。套用贝蒂·戴维丝(Bette Davis)在电影《彗星美人》(All About Eve)中的话:系好安全带,旅途会非常颠簸。
人-车博弈 1:社交无能的自动驾驶汽车?
如果在一个漆黑的夜晚,我正走在一条乡间小路上,并听到一辆车在逐渐靠近。我就会靠边站立,必要时钻进灌木丛里,直到车辆驶过,我这样做是因为我不知道司机是否看见了我。在这种情况下,我们愿意为汽车让路。
但如果是在白天的市区,我可能会在有停车标志的地方不假思索地从一辆车面前走过。或者,可能会在路边逗留一会儿,表明我准备过马路。亦或者,如果我开着车,可能直接驶过十字路口,忽视停车标志。这样的话就有两个问题:
如果自动驾驶汽车不能处理这些随意任性的人类行为,人们会如何看待与这些新科技一起共享道路空间?是会鄙视还是感觉被冒犯?
自动驾驶汽车的性能需要被改善到何种程度,才能使这些车与完全或主要由人类驾驶员来掌控的汽车顺畅地共享道路空间?
场景一:住宅小区
首先考虑住宅小区的场景,例如我自己所在的马萨诸塞州剑桥市,普通住房与三层式公寓楼在一条街道上。由于街道狭窄,所以大多是单向的,人行横道线也很少。人们希望可以在任何地点过马路,他们知道司机和行人之间有交流,这种交流常常通过眼神接触或肢体语言这类微妙的暗示进行。汽车和人是平等的,这与夜间在狭窄的乡间小路上遇到的情况完全不同。
在这个社区,汽车和人以三种方式互动。
第一种方式是:在较长的主干道上,汽车大多畅通无阻,但会有一些停止标志来调控大路和与之交错的小路的交通。沿主干道行走的人认为他们也有交通优先权,希望停在路边并打算开走的司机可以让他们先过去。此外,这些人通常希望在他们从车前经过之前,司机能提醒他们车辆的存在。
第二种方式是:当人们想穿过没有停车标志的十字路口或主干道时,他们会等两车间距变大的时候从车子中间穿过。只有等到这样的间隙,他们才会小心翼翼地走出去,并在走到路中间之前确认车子正在减速。
第三种方式是:这里的人行道很窄,如果积雪导致不便或不能穿越马路,人们通常会沿着路边走,尽量给车辆让出通行空间,并期望车辆也避让他们。
场景二:城市中央广场
再看看同样位于剑桥市的中央广场,这里的情况非常不同。这里有商店、酒吧和餐馆区(上层是被由麻省理工学院独立出来的初创公司占据),这里有人行横道线,而且人们通常会在这些指定地点过马路。他们这么做是因为这里的司机有点不礼貌,也许是因为大多数穿行而过的司机不是当地居民。
人们在人行横道线上边走边看,留意迎面而来的司机是否在减速或是否注意到行人了。查看车内情况、了解驾驶员的注意力在哪很容易,只要光照充足,即使在夜间也能轻易做到。行人和司机很多时候都会进行这种简短的交流,一旦缺乏这种互动,行人就会认为司机没有看到他们。在波士顿地区,当这样一位司机快速穿过十字路口时,行人会很生气,并对司机高声呵斥。
在更不友善的地区,如纽约市内的一些地区,行人和司机更容易发生冲突,比如故意避开眼神交流,并迫使对方妥协。这样的结果是,能在某个地区行驶的自动驾驶汽车可能不具备在另一个地区行驶的条件。
复杂性不仅限于冲突性行为。在中央广场,许多行人「奖励」司机的良好行为。如果主干道交通繁忙,司机开车进出这条路时需要耐心。如果行人看到有司机耐心等待行人过马路,有时会主动避让,挥手让其先过。
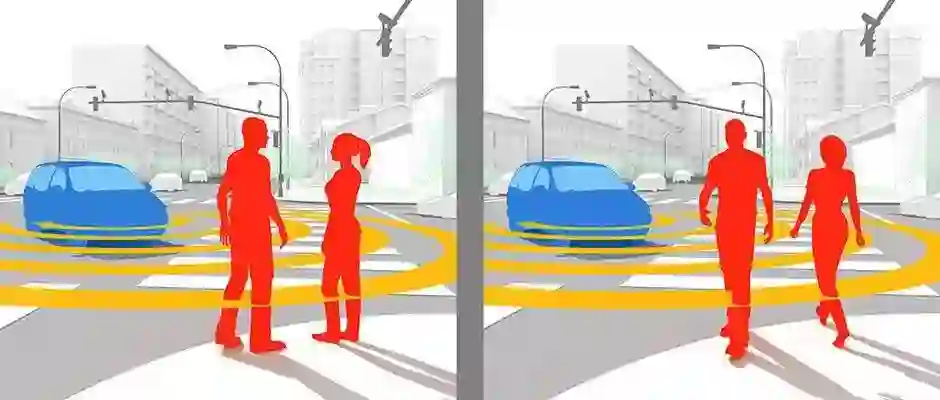
图 1 读懂肢体语言:自动驾驶汽车目前无法解决的解释性问题就是弄明白人们行为中隐含的意图。例如,一辆全自动驾驶汽车无法对人类驾驶员一目了然的事情进行判断:正在路边交谈的两个人(左图)不打算过马路;但如果一个人转身离开,并朝着马路方向走去,说明她要过马路了(右图)
图 1 中所示的场景以及本小节提到的场景,都是典型的能难倒自动驾驶汽车人工智能系统的细微差别。如果全自动驾驶汽车不能处理这些情况呢?即不能像人类驾驶员那样顺畅与行人互动呢?
场景三:雪天和交叉路口
这不仅仅是社交礼节的问题。如下图 2 所示,想想下雪天带来的挑战:汽车必须能够感知到走在路边或路中间的人,然后对此做出反应。要像大多数人类司机一样从这些人旁边开过吗?或者慢慢跟在行人后面,避免在危险道路上的行车风险?后一种策略会减缓自动驾驶汽车和跟在其后的有人驾驶汽车的行进速度。显然,有些人类司机会因为被困在自动驾驶汽车后面而恼火,此时自动驾驶汽车就会成为令人讨厌的事物。

图 2 像蜗牛一样爬行:如果雪太大,行人不得不走在路上时,汽车要决定是否像大多数人类驾驶员那样从他们身边开过去,或者跟在行人后面缓慢行驶,避免所有风险。后一种策略会减缓无人驾驶汽车和跟在其后的人类驾车辆的行进速度
即使在天气好的时候,交叉路口场景也会困扰自动驾驶汽车。假设它停在路边的停车标志旁,并感应到有两个人站在街角。这些人可能要过马路,但是,他们可能又继续聊上了;也可能是父母和孩子在等校车。人类司机可以毫不费力地辨别这种情况,那自动驾驶汽车要等多久呢?会不会有一些无聊的人站在路边,做出要过马路的样子来欺骗自动驾驶汽车呢?人们不会这样对待人类司机,因为会遭到反击,但自动驾驶汽车不允许实施反击行为。
自动驾驶汽车如何让你知道它已经看到了你,并正试图弄清楚你是否要在它前面过路呢?如果你朝路的方向走去,它可以缓慢前进,然后停下来。否则,如果没有社交互动,就和在夜间的乡间小道上走路的情况一样了,自动驾驶汽车被赋予交通优先权,不用避让行人和人类驾驶的车辆。这样的话,自动驾驶车不会招人待见,大家不喜欢看到自动驾驶车表现得像道路的主人一样。所以,最有可能发生的是,自动驾驶汽车成为无能司机,不仅阻碍大家前行,还会激怒所有人。
事实上,英国交通部的一份报告预测,由于保守的自动驾驶系统,高速公路的通行速度会略微放缓,直到自动驾驶汽车的密度超过某些阈值。但我觉得,行人互动方式的灵活性会让问题变得更加严峻。
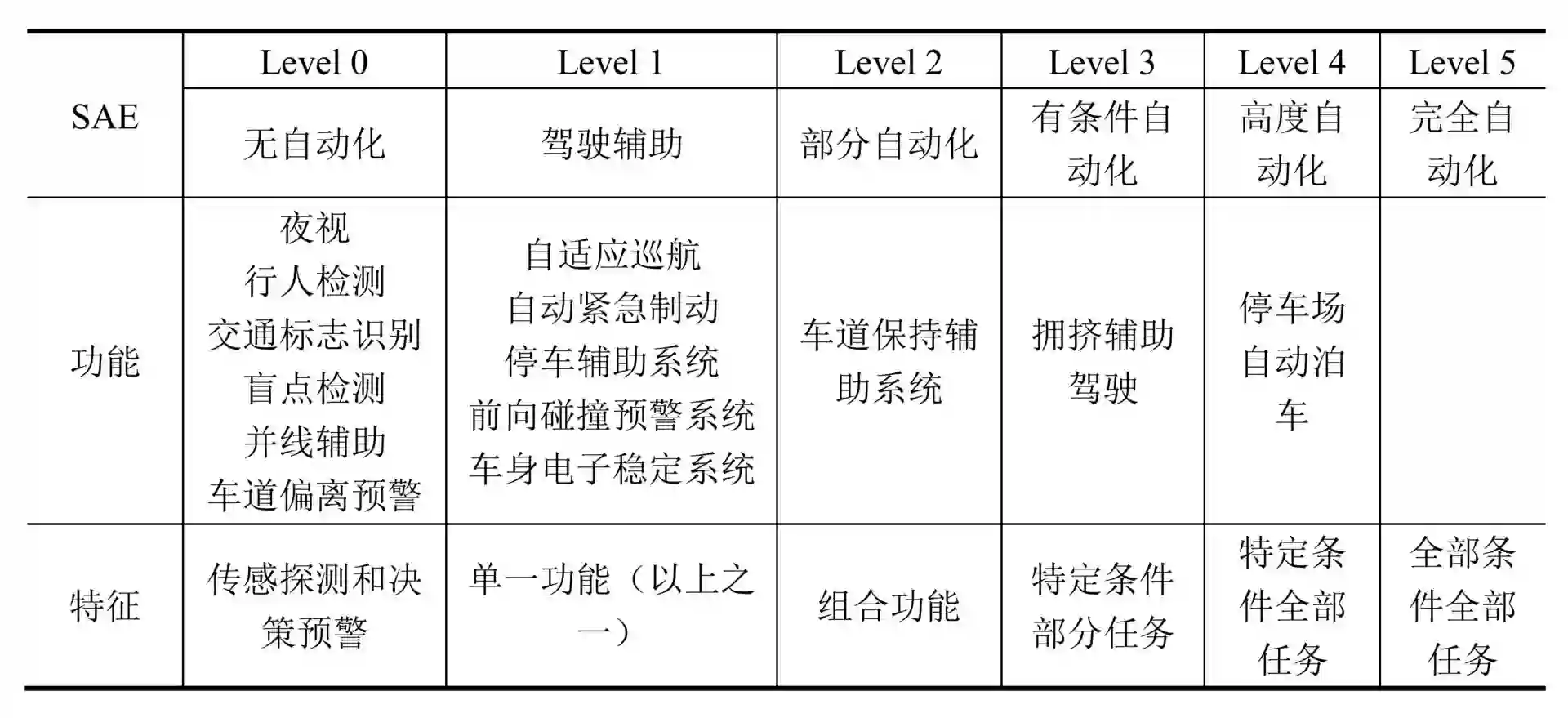
图 3 SAE 对自动驾驶汽车的分级
未来几年会有一系列自动驾驶汽车上路,与行人、骑自行车的人、没有自动驾驶功能的汽车等共享道路。到时会有各种级别的自动驾驶汽车,从 Level 2、Level 3 的半自动驾驶汽车,到 Level 4、 Level 5 的全自动驾驶汽车(如图 3 所示)。如果一辆半自动驾驶汽车未按照潜规则行动,旁观者可能会责怪使用这辆车的人。但如果是全自动汽驾驶汽车,他们就不会有这样的问题了,在这种情况下,他们会责怪汽车本身。
不难看出,这可能会导致住在市区的行人和司机对达到 Level 4、Level 5 的自动驾驶汽车的真正厌恶,而且人们会毫不留情地表达内心的这份厌恶。在和我进行的私下谈话中,不止一家制造商担心人类驾驶员会欺负 Level 4 的自动驾驶汽车,所以工程师们尽量让达到 Level 4 的测试车辆与传统车型的外观相同。
人-车博弈 2:没有公德心的自动驾驶汽车车主?
当然,欺负行为可以从两方面实现。与在社交方面显得较愚蠢而被欺负的自动驾驶汽车相对应的,是那些可以利用自动驾驶功能违背社会公德的车主。
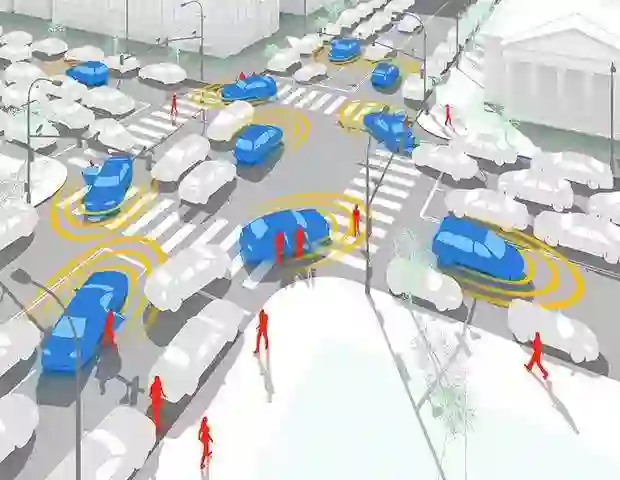
图 4 代劳造成的混乱:全自动驾驶汽车车主可能会让车子以损人利己的方式行事。例如,一个常去听音乐会的人可能会在活动开始前派一辆机器人汽车在活动地点附近占好停车位,或者更糟糕的是,在活动地点徘徊几个小时,只为了在活动结束后将他尽快带回家
马萨诸塞州大道从剑桥的中央广场穿过,一直延伸到哈佛广场,这条路上既有民用建筑,又有商用建筑,还有计时的停车场。有一天,我需要在那里的 UPS 商店拿一个沉重的包裹,因为附近没有免费停车位,所以我一边等位一边在 100 米的距离范围内来回移动。当时我想,如果我有一个达到 Level 4 或 Level 5 的自动驾驶汽车,我就可以让它自己来回移动,自己下车去商店拿包裹。这就是违背社会公德行为的根源:方便自己,但给他人造成不便。
人们会利用自动驾驶汽车走许多其它类似的捷径。我确定其他车主一定会比我更有创意,这里就有 3 个例子:
人们会在星巴克门口下车,跑进去点餐,把车留在不能停车的地方,阻碍他人通行。他们心里想,反正如果其它车需要通行的话,全自动驾驶汽车会自动让路的。这么做也许会奏效,但这么做却以浪费他人的时间为代价。或许车主们可能会对自动驾驶汽车移动前产生的麻烦有一定的容忍度,但我不太看好。
假设有人要去参加晚会而附近没有多少停车位,再假设自动驾驶汽车总是在附近徘徊,等待车主回来,所以其它汽车要想通过并前往指定地点,需要花费一段时间。那么拥有两辆车的家庭可能会在当天早些时候派他们的一辆全自动驾驶汽车去寻找最近的停车位,然后坐第二辆全自动驾驶汽车来到现场,随后让这辆车立即返回。活动结束后,他们的第一辆全自动驾驶汽车就在附近等着他们。由此,成本被强加到公共资源上,因为一个车位被占用了一整天。
我孩子上的是郊区学校,各种郊区学校都有接送小孩的传统:大多数母亲会在放学前开车过来,并按照到达顺序排队;放学后,老师会把孩子带出来,和家长一起把孩子送到车上。然后车子开走,一次一辆。当几个家庭先有全自动驾驶汽车后,他们一定会先派它来排队,这样他们的孩子就会先被接回家。慢慢会形成竞争,看看谁的机器人汽车第一个到校。教师也将感到不便,但人们仍然会尝试这么做。
在向全自动驾驶汽车过渡的早期,富人将有一种全新的方式跟社会中的其他人区别开来。如果对此有疑问,可以早上开车来位于美国洛杉矶南部的 101 号公路上看看:特斯拉汽车在左侧车道上疾驰而过。
列车尚未实现全自动驾驶,汽车可以吗?
我对自动驾驶汽车持怀疑态度的另一个原因是:美国和大多数其他国家甚至还没有实现公共交通系统的全自动化。所以我们如何完成全自动驾驶汽车这项更加艰巨的任务呢?
全球确实有许多自动驾驶的列车系统,但它们大多在特定环境中运行——在美国,大多数在机场运行,轨道跨度只有几公里,并且所有这些都与系统之外的车辆和人员完全隔离开来。这样的系统接近 Level 4 的自动驾驶汽车,只在范围极为有限的地理环境中运行。Level 5 的自动驾驶列车可以在交叉轨道上运行或像有轨电车那样,在汽车和行人之间穿行。目前还没有人正在测试 Level 5 的自动驾驶列车,甚至没有人提出要这么做。
要知道实现列车的自动驾驶要比汽车简单得多——列车在轨道上行驶,轨道限制了列车的行驶方向,而且所有列车系统都是由专业团队运行管理的。个人消费者不会购买、运营列车,但对于即将到来的自动驾驶汽车,就会出现这种情况。
我觉得自动驾驶汽车的初期应用会受到限制,这种限制与今天自动驾驶的机场列车相似。我们会看到自动驾驶卡车在指定车道上跟在人类自主驾驶的卡车后面保驾护航,但是一旦汽车离开了高速公路,我们就会安排人类司机操控每辆卡车。
而且,和机场列车一样,我们会看到 Level 4 的自动驾驶汽车在没有行人的有限区域内行驶——比如车库,在此场景下司机可以下车,让汽车自己在四周空隙仅有几英寸宽的空间内停车。
随后,我们可能会在大城市的特定区域内看到由 Level 4 的自动驾驶汽车提供打车服务,这片区域的界限明确,边界处放有明显的「步行」标志,将行人和汽车分开。旧金山的一些地方可能正在做这样的准备。事实上,优步已经在那里用这样的汽车做过实验了,尽管每辆车上都坐有人类司机,以便他们在软件失效的情况下接管车辆。
在人口、交通密集的城市环境中,我们也可能看到一些用于送货的 Level 4 自动驾驶汽车。但是,他们需要尊重行人,并避免上下班高峰期造成堵塞,影响其他车辆通行。
小结:管理预期,坚持不懈!
正如罗伊·阿马拉(Roy Amara)总结的著名规律:「我们总是高估技术的短期影响,低估其长期影响。」
这就是我们今天的处境:人们高估了 Level 5 自动驾驶汽车到来的时间点以及 Level 4 自动驾驶汽车在未来几年的市场普及程度。人们只看到技术上的可能性,而没有看到自动驾驶汽车入侵人类空间后将遇到的阻力,不论它们在行车时是表现得粗鲁还是过于尊重。
当然,这种新的驾驶方式最终还是会到来。但是它会慢慢来临,逐步减少有人驾驶,直至将其限制为特定场所的一种娱乐方式。
自动驾驶的时代必然到来,但这一天不会很快到来。
作者:厚势分析师拉里佩
转载请注明作者和厚势公号:iHoushi
-END-
文章精选
企业家
智能驾驶
新能源汽车
项目和评论
厚
势
汽
车
为您对接资本和产业
新能源汽车 自动驾驶 车联网
联系邮箱
bp@ihoushi.com

点击阅读原文,查看[一文读懂汽车网络安全]


