同济熊璐教授:无人驾驶车辆的底层动力学控制研究 | 厚势

厚势按:本论文在考虑车辆动力学特性和执行器饱和约束的前提下,将无人驾驶车辆的运动控制问题转化为纵向和横向的渐进跟踪问题,以上层的期望车速和期望道路曲率为控制目标,利用反馈线性化的思想,设计了一种前馈加抗饱和积分的动力学控制算法,并且基于李雅普诺夫函数证明了闭环系统平衡点的渐进稳定。
实车试验表明,该动力学控制算法能够快速准确地实现车速和道路曲率的跟踪,从而验证了其有效性。
本文来自 2017 年 11 月 24 日出版的《 汽车技术 》,作者是同济大学汽车学院的熊璐教授、付志强、柏满飞和章仁燮。
1. 前言
无人驾驶车辆的关键技术主要包括环境感知、智能决策、路径规划和车辆运动控制 [1]。无人车的运动控制需要车辆在保证安全的前提下,准确跟踪期望轨迹,车辆控制主要分为纵向控制和横向控制 [2],通过控制油门踏板、制动踏板和转向盘转角实现对车速和道路曲率的跟踪。
无人车的底层动力学控制研究对于实现目标车辆的控制有着重要意义。随着无人驾驶技术的发展,许多典型的控制方法也运用到无人车的底层运动控制中,主要包括根据输入、输出建立简单的 PID 控制,利用车辆动力学模型的状态反馈控制以及考虑车辆未来时刻误差对当前控制输入影响的模型预测控制。
Marino R [3] 利用嵌套 PID 的状态反馈方法设计了路径跟踪算法,上层根据路径和车辆之间的相对位置关系建立包含航向角误差和侧向偏差的 PID 控制,下层包含横摆角速度的 PID 跟踪控制,但该算法没有考虑执行器饱和对控制算法的影响。
赵盼 [4] 提出基于专家规则的 PID 方法,对纵向车速和横向运动进行控制,但缺乏误差跟踪系统的稳定性分析。文献 [5] 在研究了道路坡度及车辆质量自适应的自主驾驶车辆纵向速度控制器的设计,但通过标定建立的表格模型很难完全描述车辆轮胎的非线性特性。这些类型的 PID 控制方法很少考虑车辆的动力学特性,以及控制系统的稳定性。
Attia R [6] 设计了非线性纵向控制策略和基于非线性模型预测控制的自动转向控制算法。Falone P [7~9] 提出了基于模型预测控制的前轮主动转向和四轮独立制动集成控制方法来实现轨迹跟踪。由于模型预测控制算法本身计算量较大,大部分研究只有仿真结果,实际应用较为困难。
可以看出,大多数相关研究很少考虑车辆的动力学特性和执行器的饱和约束对控制性能的影响,以及整个闭环系统的稳定性。
本文在考虑车辆动力学特性的前提下,将车辆的纵侧耦合特性行解耦,针对纵向车速和曲率跟踪两种情况分别进行研究,将车速跟踪转化为轮速跟踪,提出了包含车速跟踪和道路曲率跟踪的动力学控制算法,利用反馈线性化的思想,建立前馈加条件积分的动力学控制算法,并且对其应用非线性控制理论,证明了闭环系统的稳定性,最后通过实车试验验证了算法的有效性。
2. 车辆动力学模型
在不考虑纵向和横向耦合的情况下,忽略转向轮在纵向上的分力。假设车辆行驶在坡度为 i 的道路上,单轮车辆模型如图 1 所示。
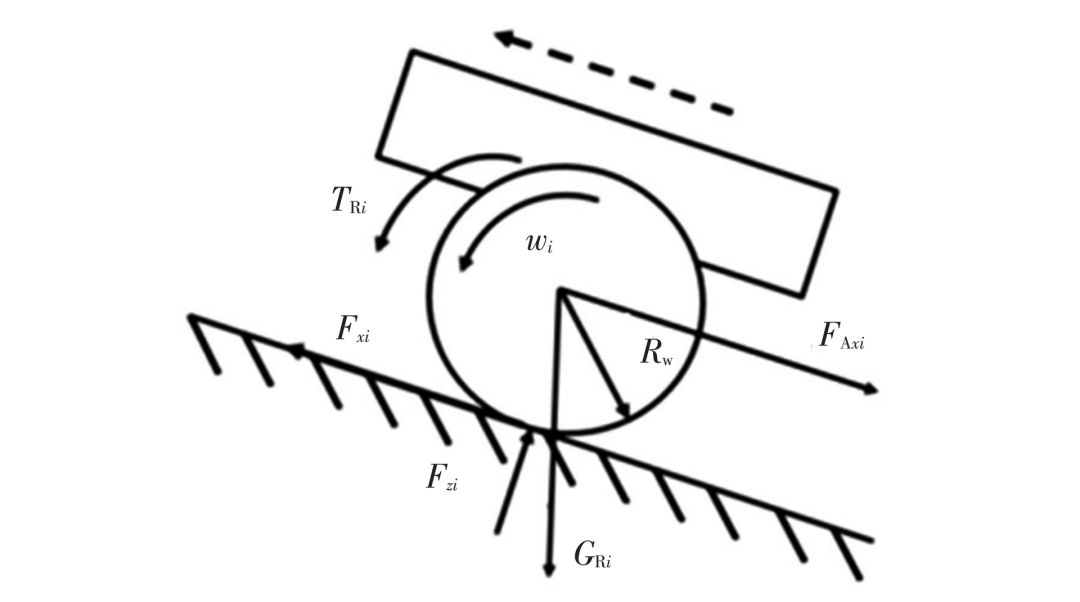
图 1 单轮车辆模型
车辆的整体纵向运动方程为:
坡度根据简单的运动学方法进行估计,由于对车速差分会产生较大的噪声,需要对其进行滤波:

分析车轮的受力情况,其动力学方程为:

假设当车轮不存在打滑时:

联立式 (1)、式 (3)、式 (5),可得:

将车辆简化为单轨模型,则垂直于车辆纵轴线上的力平衡方程为:

绕质心的力矩平衡方程为:
3. 动力学控制策略
本文中的无人车动力学控制算法主要由纵向车速控制和道路曲率控制算法组成。
动力学控制器从上层控制器中得到期望的信号,经过计算得到期望的油门开度,制动主缸的液压力以及转向盘转角,来实现车速跟踪和道路曲率跟踪控制。
底层执行器包含线控油门、电子液压制动、线控转向系统等,其中电子液压制动可以跟踪制动主缸的期望液压力,线控转向系统能够保证转向盘转角的准确跟踪。整体控制架构如图 2 所示。
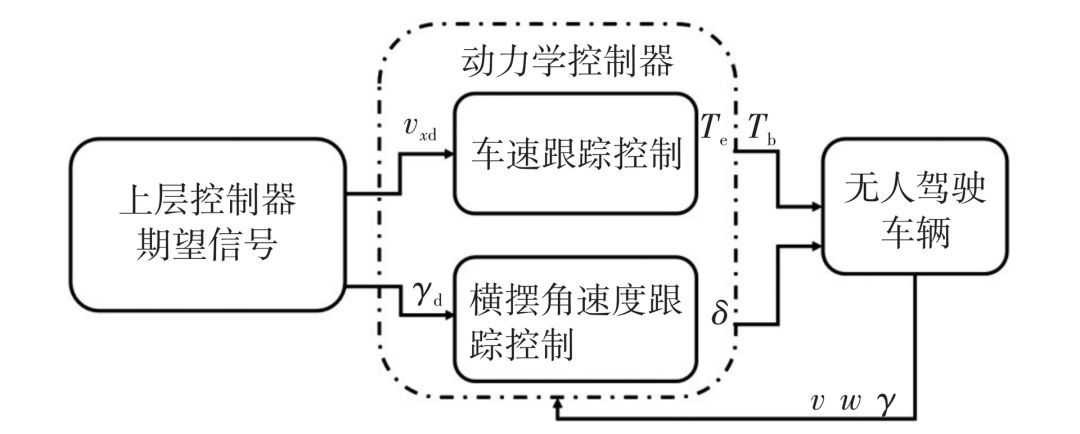
图 2 动力学控制策略架构
其中,车速跟踪和道路曲率跟踪的期望值分别为:

期望的道路曲率与相应的期望车辆横摆角速度相对应,要限制期望曲率不超过车辆最大曲率,同时,为防止车辆行驶过程中发生侧翻,侧向加速度的绝对值不超过 0.8 μg,μ 为路面附着系数。
3.1 轮速跟踪算法
考虑车辆的动力学特性和执行器的饱和约束,将车速跟踪转化为轮速跟踪 。 定义轮速跟踪误差为 w͂=w-w_d,则跟踪误差方程为:

利用反馈线性化的思想,将系统中的非线性部分消去,需要系统在任意期望的轮速稳定,则存在一个输入的稳态值即前馈 T_fore:

因此,利用前馈加基于条件积分的方法设计反馈控制律 [10~11],考虑到系统参数不确定性以及外部的干扰会影响跟踪系统的稳定性,当系统长时间无法稳定时,积分项会逐渐增大,由于执行器的饱和约束会损害系统的稳定性,而条件积分方法保证了在执行器饱和时系统仍然镇定。总的控制律包含前馈和反馈,且两者的最大值不超过发动机可提供的最大力矩。
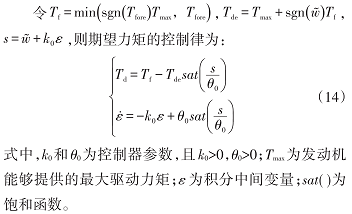
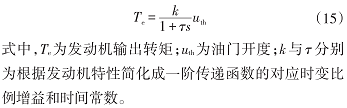
上面设计得到总的控制输入包含驱动力矩和制动力矩。因此,我们需要设计驱动和制动的切换策略,并且将控制律转化为油门开度和制动总缸的液压力。发动机输出转矩和油门开度之间的关系可以表示为:
根据车辆制动器的结构,制动力矩和制动主缸的液压力之间的关系如下:

通过判断总的期望力矩的正负来切换油门和制动控制,其中驱动力矩通过 PI 控制得到油门开度,电子液压制动能够精确跟踪制动总缸的液压力来达到期望制动力矩。切换逻辑如图 3 所示。
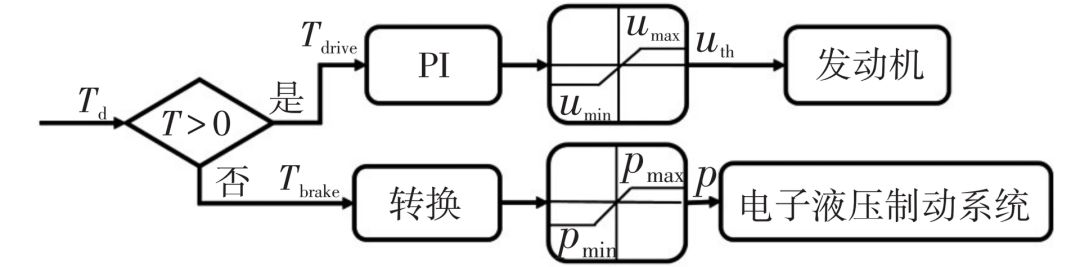
图 3 油门和制动的切换逻辑
控制器的稳定性对于系统来说至关重要,通过建立李雅普诺夫函数可证明闭环系统的渐进稳定。首先将积分变量未饱和时的控制律代入到闭环系统中,可得:

建立李雅普诺夫函数:
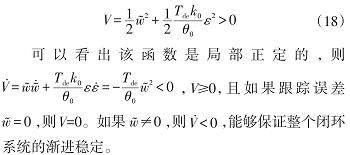
当积分中间变量饱和时,控制输入 Td 趋于 ± Tmax,由式 (14) 可知,此时积分变量 ε 趋于 k0/θ,保证了积分稳定不会发散,避免积分发散损害系统的稳定性。由此,证明了闭环系统的渐进稳定。
3.2 横摆角速度跟踪算法
期望道路曲率与车辆期望横摆角速度的对应关系为:

因此,可将期望的道路曲率跟踪问题转化为横摆角速度跟踪。根据车辆的动力学特性,通过控制转向盘转角进行横摆角速度的跟踪控制,实现转向控制。将式 (9) 进行转化,得到系统输出和输入之间的关系为:


利用反馈线性化的思想设计控制律,控制律由前馈加抗饱和积分的状态反馈组成,则前馈消去误差系统的其它部分的构成为:

则总的控制律为:
将未饱和的控制律带入到闭环系统中,得到跟踪误差系统:
通过建立李雅普诺夫函数来证明误差系统的渐进稳定:
则横摆角速度跟踪算法能够保证跟踪误差的渐进稳定。同时,控制器还需要考虑系统内动态的稳定性,即质心侧偏角的稳定性,假设期望横摆角速度 γd 以及 γ̇d 有界。将式 (8) 转换为:
将控制律带入式 (26) , 可得:

由于 E + GC/D > 0 ,且当 γ 趋近于 γd 时,方程右侧有界,则质心侧偏角有界,系统的内动态是稳定的。
当积分中间变量饱和时,控制输入 δd 趋于 ± δmax,由式 (23) 可知,此时积分变量 ε1 趋于 Dδ1,能够保证积分不发散,保证积分变量饱和时系统的稳定性。
因此,动力学控制器能够保证跟踪误差闭环系统渐进稳定。
4. 实车试验
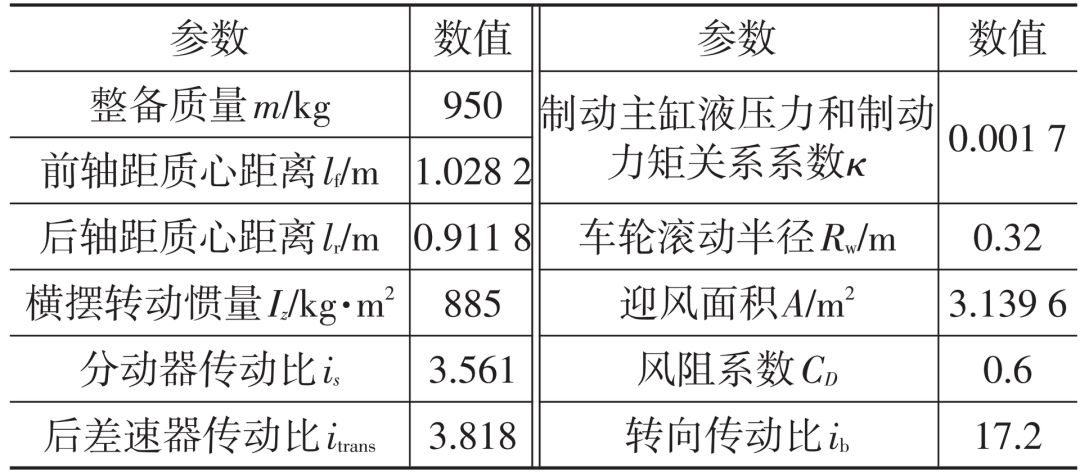
本文中所采用的试验车辆的传动系统由发动机、CVT、分动器以及前、后差速器构成,该车采用后轮驱动。为保证该无人车的执行需求,底层的执行器包含线控转向系统、线控油门以及电子液压制动系统。试验车辆如图 4 所示,车辆参数如表 1 所示,试验工况包含跟踪阶跃信号和跟踪上层控制器的期望信号。

图 4 试验车辆
表 1 车辆参数
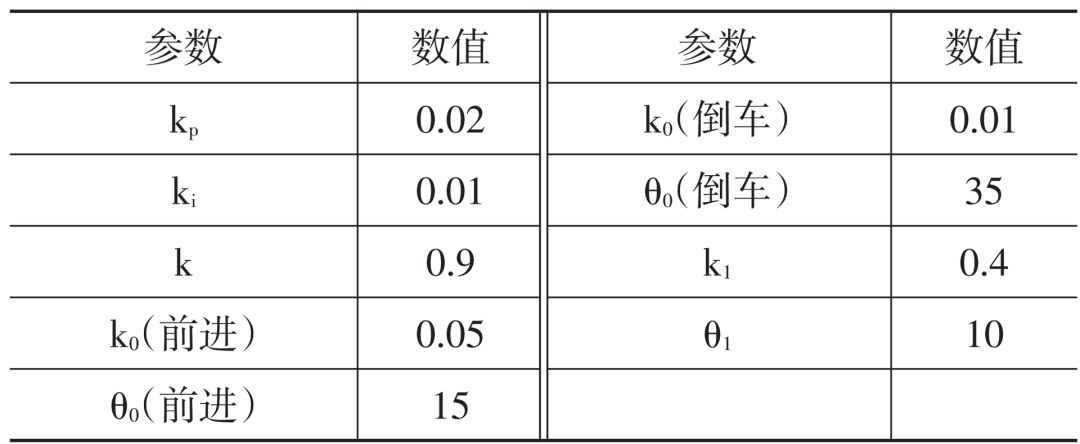
在试验中标定控制器参数,观察系统对阶跃输入的响应,来调整系统的动态响应和稳态性能。分别调节车速控制和曲率跟踪控制,其中车速控制有前进挡和倒挡的参数,最后观察对上层期望信号的跟踪效果,其中,从期望的驱动力矩到油门开度的 PI 参数也通过对阶跃输入的响应进行调节,经过参数整定后的控制器参数如表 2 所示。
表 2 控制器参数
4.1 阶跃信号跟踪效果
在直线行驶工况下验证无人车对阶跃期望车速信号的跟踪效果,调整控制器的参数保证跟踪性能。首先,为验证控制器的阶跃跟踪效果,将期望车速分别设置为阶跃 5 km/h、10 km/h、15 km/h、20 km/h、25 km/h。跟踪效果及控制输入如图 5 所示。
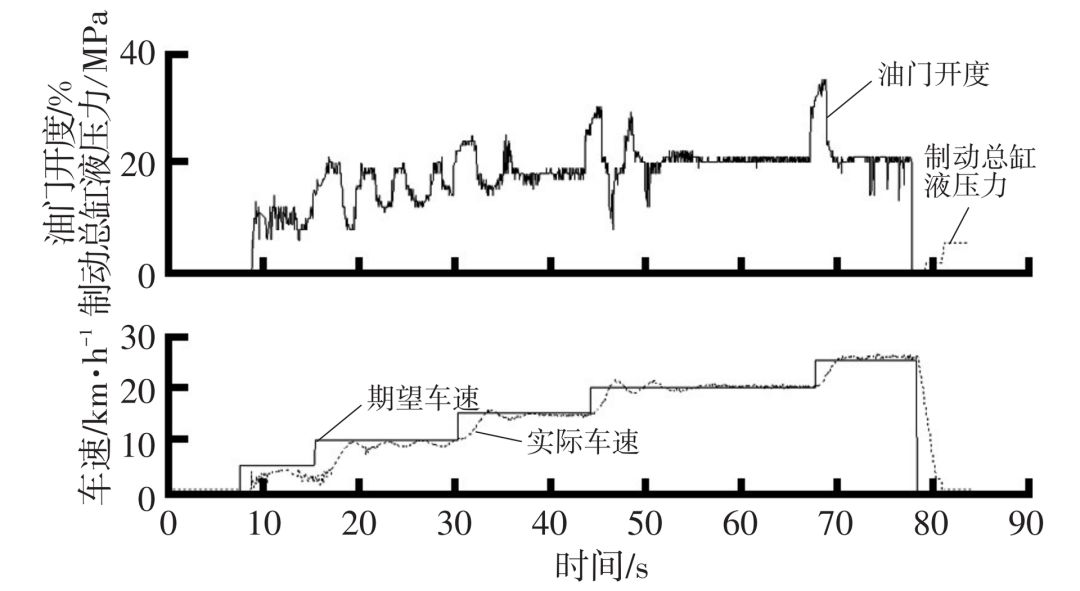
图 5 车速跟踪阶跃响应及对应的控制输入
由图 5 可以看出,无人车能够快速准确地达到期望车速,平均跟踪误差在 2 km/h 以内,在期望车速不变的情况下,实际油门开度逐渐趋于稳定,在速度低于10 km/h 时,实际车速信号波动较为严重,是由于低速起动时 CVT 打滑不稳定造成的,在 20 km/h 时由于受到外部干扰而存在微小波动,通过调节控制器参数改善了跟踪性能。
为了验证无人车的加、减速性能是否满足期望需求,将期望车速设置为 35 km/h。跟踪效果及控制输入如图 6 所示。
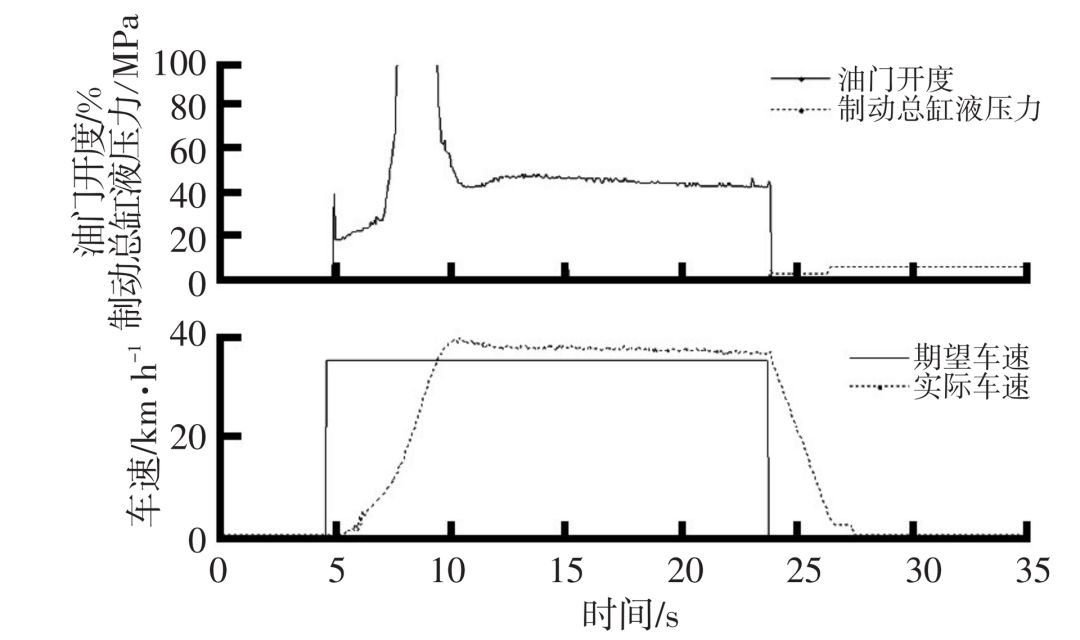
图 6 期望车速 35 km/h 跟踪阶跃响应及对应的控制输入
由图 6 可以看出,经过约 5 s,实际车速从 0 km/h 加速到 35 km/h,虽然在跟踪过程中有一定的超调,但稳态误差不超过 2 km/h,其平均加、减速度约为 ±2 m/s2。由于期望车速较高,实际油门开度快速上升,然后逐渐下降趋于稳定,说明动力学控制算法能够满足加速和减速的能力需求。
在稳态圆周工况下验证无人车跟踪阶跃横摆角速度信号的跟踪效果,在车速为 10 km/h 时,设置期望横摆角速度分别为 0.2 rad/s、0.3 rad/s、0.4 rad/s,跟踪效果和控制输入转向盘转角如图 7 所示,线控转向系统能够精确跟踪期望转向盘转角。
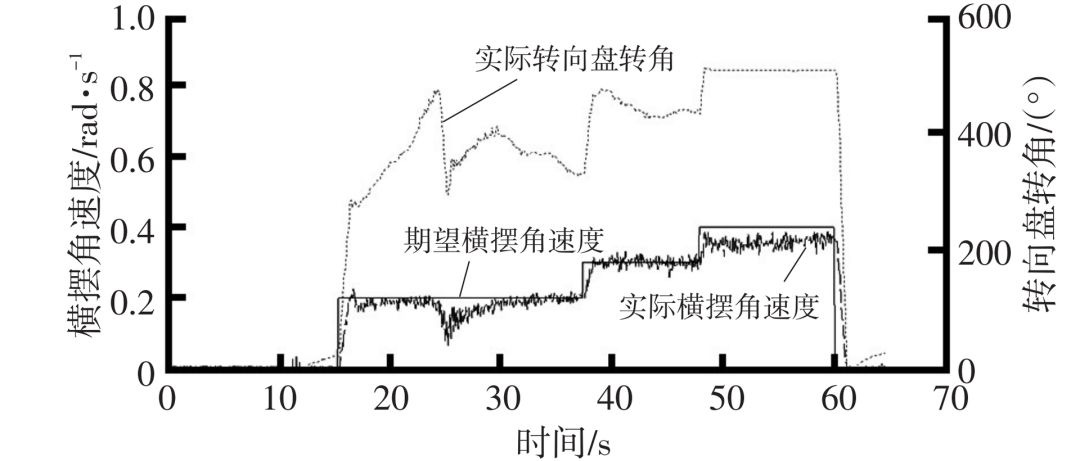
图 7 10 km/h 下横摆角速度阶跃跟踪响应
由图 7 可以看出,无人车能够准确跟踪到期望的阶跃横摆角速度信号,平均跟踪误差为 0.02 rad/s,转向盘转角随着期望的横摆角速度信号保持不变,也趋于稳定。
在车速为 5 km/h,设置期望的横摆角速度信号分别为 ±0.1 rad/s、±0.2 rad/s、±0.3 rad/s,跟踪效果及对应的控制输入如图 8 所示。
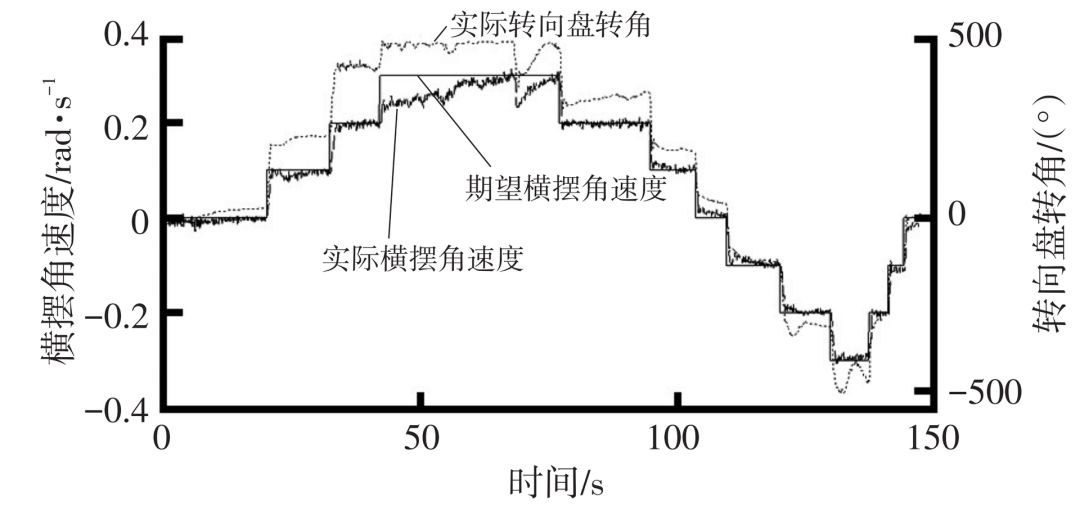
图 8 5 km/h下横摆角速度阶跃跟踪响应及控制输入
由图 8 可以看出,无人车在车速为 5 km/h 时能够准确跟踪期望的阶跃横摆角速度信号,几乎不存在超调,在 0.3 rad/s 时由于受到外部干扰存在微小波动,但迅速恢复到期望值,证明了动力学控制器具有较强的抗干扰能力,同时表明,动力学控制算法在不同车速下均能准确跟踪期望横摆角速度信号。
4.2 跟踪上层控制器的期望信号
该无人驾驶车辆能够实现遥控行驶,通过遥控装置接受上层期望的车速信号和道路曲率,整体控制框架包含上层控制器和底层动力学控制器,试验工况包含直线工况和转向行驶工况,车速跟踪效果如图 9 所示,横摆角速度跟踪效果如图 10 所示。
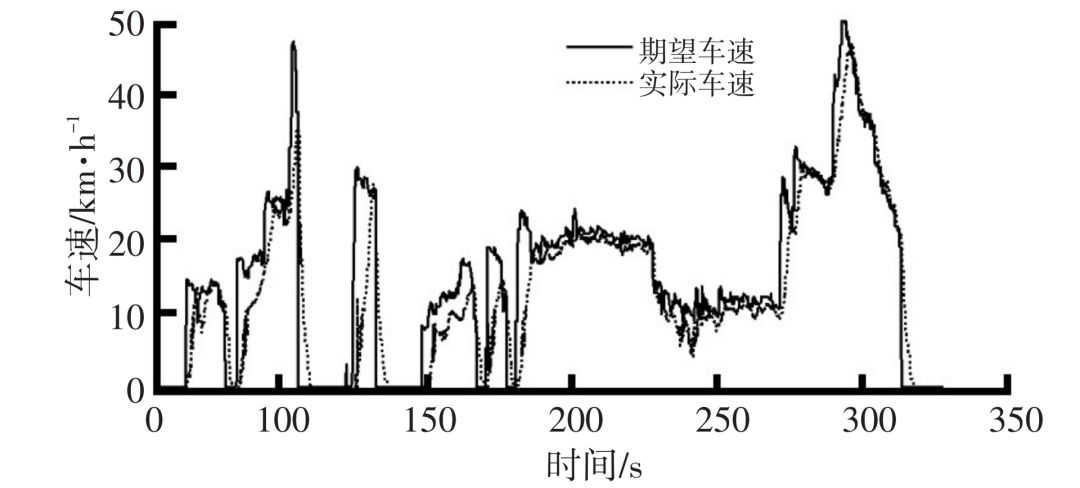
图 9 跟踪上层期望的车速信号
从图 9 可以看出,期望车速变化较快加速和减速需求较高,实际车速能够快速跟踪期望车速的变化,整体趋势基本一致,平均跟踪误差在 2 km/h 以内,表明车速跟踪控制算法能够准确且迅速地响应上层控制器的需求。
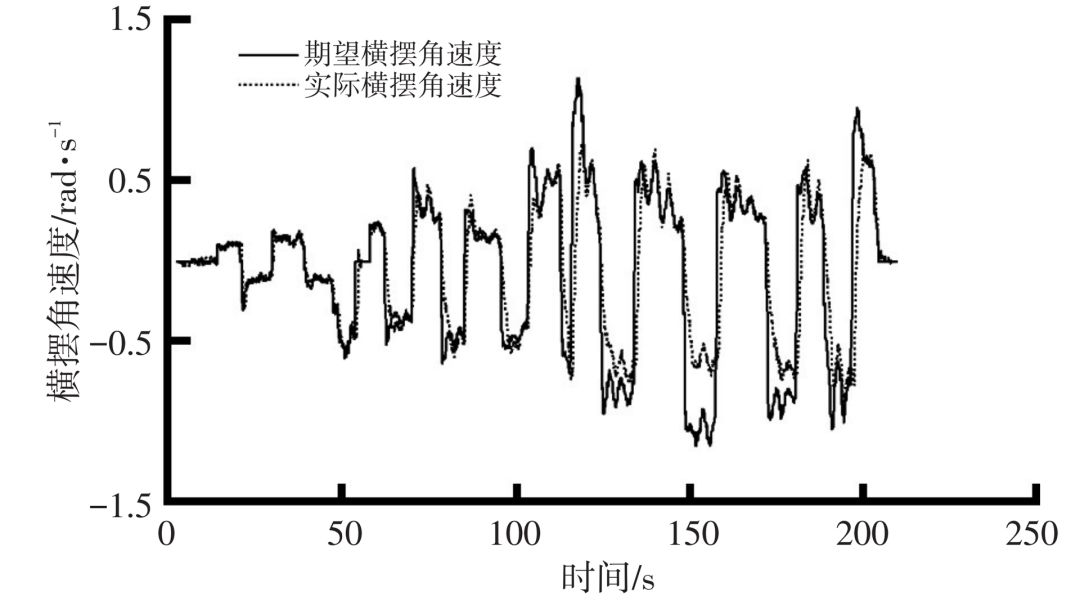
图 10 跟踪上层期望的横摆角速度信号
从图 10 中可以看出,无人车能够准确跟踪变化连续的期望横摆角速度信号,实际横摆角速度信号随期望值的变化而变化,且趋势一致。在第 150 s 附近存在一定的跟踪误差,是由于期望横摆角速度过大,此时期望值不合理,超过当前车速下对应的最大横摆角速度,需要对期望值进行一定的限制,证明了横摆角速度跟踪控制算法能够保证道路曲率的跟踪。因此,动力学控制算法能够保证车速和横摆角速度的准确跟踪,实现无人车的纵向和横向控制。
5. 结束语
本文围绕无人车的底层运动控制,在考虑车辆动力学特性和执行器饱和约束的前提下,利用反馈线性化的思想,设计了车速跟踪控制算法和横摆角速度跟踪控制算法,避免了执行器饱和时的积分发散,并利用非线性控制理论,建立李雅普诺夫函数验证了动力学控制算法的稳定性。
实车试验验证了所设计的动力学控制算法的有效性,能够保证无人车迅速且准确地跟踪上层期望的车速和横摆角速度信号,实现目标车的遥控行驶。
参考文献
1. 孙振平 .自主驾驶汽车智能控制系统:[学位论文]. 长沙:国防科学技术大学,2004.
2. 郭景华,罗禹贡.智能车辆运动控制研究综述 . 汽车安全与节能学报,2016,7 (2):151~159.
3. Marino R, Scalzi S, Netto M. Nested PID Steering Control for Lane Keeping in Autonomous Vehicles. Control Engineering Practice,2011,19 (12):1459~1467.
4. 赵盼 . 城市环境下无人驾驶车辆运动控制方法的研究:[学位论文]. 合肥:中国科学技术大学,2012.
5. 刘柏楠.道路坡度及车辆质量自适应的自主驾驶车辆纵向速度控制研究:[学位论文]. 长春:吉林大学,2015.
6. Attia R, Orjuela R, Basset M. Combined Longitudinal and Lateral Control for Automated Vehicle Guidance. Vehicle System Dynamics,2014,52 (2):261~279.
7. Falcone P, Borrelli F, Asgari J, et al. Predictive Active Steering Control for Autonomous Vehicle Systems. IEEE Transactions on Control Systems Technology,2007,15 (3):566~580.
8. Falcone P, Tseng H E, Borrelli F, et al. MPC- based Yaw and Lateral Stabilisation Via Active Front Steering and Braking. Vehicle System Dynamics,2008,46 (sup1):611~628.
9. Keviczky T, Falcone P, Borrelli F, et al. Predictive Control Approach to Autonomous Vehicle Steering. American Control Conference,Minneapolis,2006.
10. Jin C, Xiong L, Yu Z, et al. Path Following Control for Skid Steering Vehicles with Vehicle Speed Adaption. SAE Technical Papers,2014.
11. Castro R D, Rui E A, Freitas D. Wheel Slip Control of EVs Based on Sliding Mode Technique with Conditional Integrators. IEEE Transactions on Industrial Electronics,2013,60 (8):3256~3271.
作者在同济大学汽车学院官网上的简介

熊璐博士,1978 年生,Universität Stuttgart 博士后。
现任同济大学汽车学院教授、博导,研究方向为汽车动力学、自动驾驶技术。
编辑整理:厚势分析师拉里佩
转载请注明来自厚势和厚势公号:iHoushi
-END-
文章精选
企业家
智能驾驶
新能源汽车
项目和评论
这些大神从Google出走,创办了五家(命运各异的)无人车公司
厚
势
汽
车
为您对接资本和产业
新能源汽车 自动驾驶 车联网
联系邮箱
bp@ihoushi.com

点击阅读原文,查看文章「为什么说百度阿波罗画虎不成反类犬?」



