【文章荐读】平行驾驶:基于信息物理社会系统(CPSS)的交通自动化与汽车智能化统一融合框架

Parallel Driving in CPSS:
A Unified Approach for Transport Automation and Vehicle Intelligence
Fei-Yue Wang, Fellow, IEEE, Nan-Ning Zheng, Fellow, IEEE, Dongpu Cao,
Clara Marina Martinez, Li Li, Fellow, IEEE, and Teng Liu
文章导读
智能网联汽车的迅速发展为当前的车辆控制和交通系统提出严峻的挑战。本文提出智能网联汽车的一种全新的基于云端化的信息物理社会系统(CPSS)解决方案,平行驾驶。
本文首先介绍CPSS定义和基于人工社会(Artificial societies)、计算实验(Computational experiments)和平行执行(Parallel execution)智能机器系统。随后,提出了基于CPSS的平行驾驶框架,融合物理世界、精神世界和人工世界,并详细论述了平行测试、平行学习以及平行增强学习等方法,它们在智能网联汽车的感知、决策与规划和控制等关键模块中都有巨大的应用潜力。
受到平行系统思想的启发,在智能视界及其应用实例的基础上,本文提出了平行视界的概念。平行驾驶旨在为涵盖不同自动化层级的智能网联汽车系统和未来智能交通提供一套智能融合解决方案及框架。
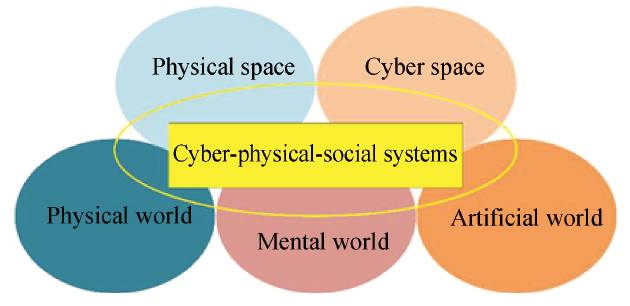
图1 CPSS的定义以及信息、物理和社会系统之间的相互联系
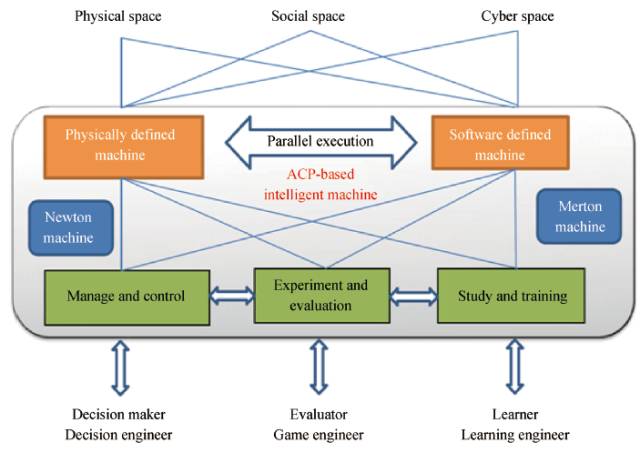
图2 基于ACP方法的智能机器系统框架. A:人工社会,C:计算实验,P:平行执行
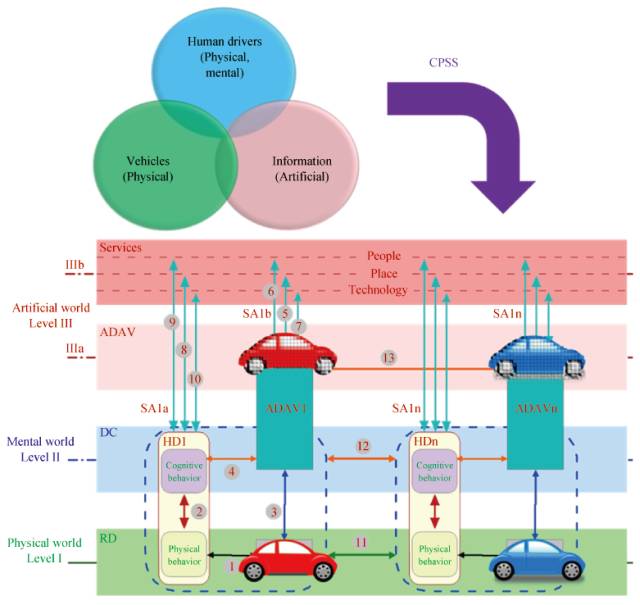
图3 基于CPSS的平行驾驶框架. RD:实际驾驶,DC:驾驶员识别,CPSS包含三大组成部分:人(社会维度),位置信息(地理维度)和技术(传感器、物联网等). HD:人类驾驶员,RV:实际车辆,ADAV:人工驾驶员和人工车辆,SA:态势感知
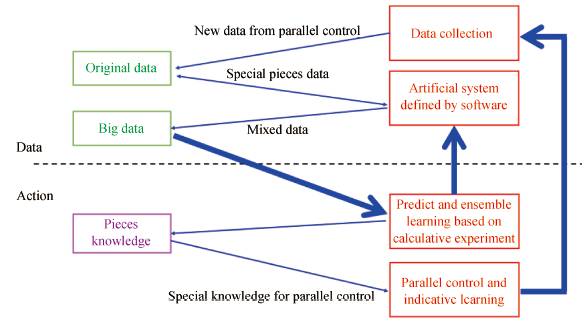
图4 平行学习框架,主要包含数据处理和行动学习两大阶段
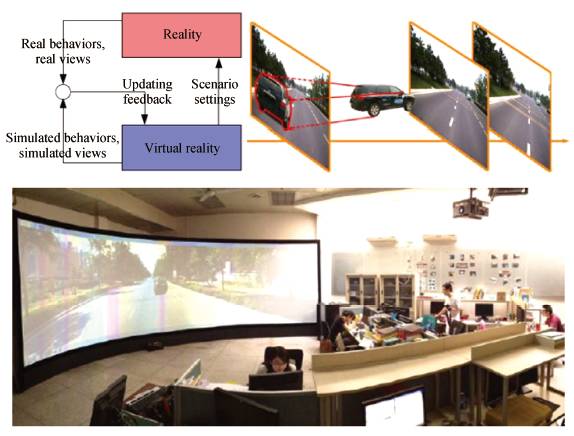
图5 平行测试的实现过程和一个实例
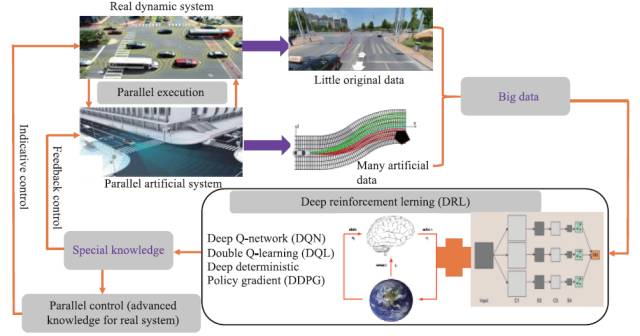
图6 平行增强学习理论框架. 主要包括数据收集及生成过程、数据处理及最优策略的计算过程、特定知识的应用过程
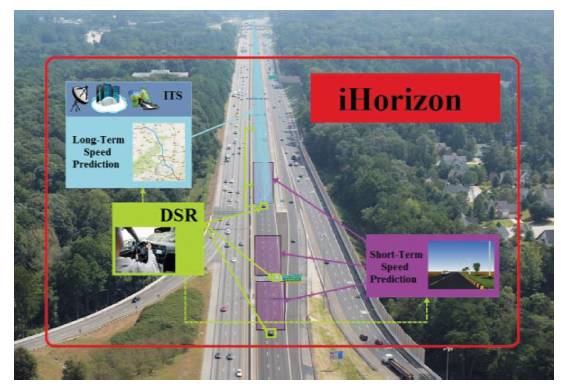
图7 平行视界框架,主要包括三大模块:1)驾驶风格识别模块,2)短期速度预测模块,3)基于周期视界的长期速度预测模块
文章信息
F.-Y. Wang, N.-N. Zheng, D. P. Cao, C. M. Martinez, L. Li, T. Liu, “Parallel driving in CPSS: a unified approach for transport automation
and vehicle intelligence”, IEEE/CAA Journal of Automatica Sinica, vol. 4, no. 4, pp.577-587, Oct. 2017.
作者简介

Fei-Yue Wang received his Ph.D. in Computer and Systems Engineering from Rensselaer Polytechnic Institute, Troy, New York in 1990. He joined the University of Arizona in 1990 and became a Professor and Director of the Robotics and Automation Lab (RAL) and Program in Advanced Research for Complex Systems (PARCS). In 1999, he founded the Intelligent Control and Systems Engineering Center at the Institute of Automation, Chinese Academy of Sciences (CAS), Beijing, China, under the support of the Outstanding Overseas Chinese Talents Program from the State Planning Council and ''100 Talent Program'' from CAS, and in 2002, was appointed as the Director of the Key Lab of Complex Systems and Intelligence Science, CAS. From 2006 to 2010, he was Vice President for Research, Education, and Academic Exchanges at the Institute of Automation,CAS. In 2011, he became the State Specially Appointed Expert and the Director of the State Key Laboratory of Management and Control for Complex Systems.
Dr. Wang's research focuses on methods and applications for parallel systems, social computing, and knowledge automation. He was the Founding Editor-in-Chief of theInternational Journal of Intelligent Control and Systems (1995-2000), Founding EiC of IEEE ITS Magazine (2006-2007), EiC of IEEE Intelligent Systems (2009-2012), and EiC of IEEE Transactions on ITS (2009-2016). Currently he is EiC of IEEE Transactions on Computational Social Systems, Founding EiC of IEEE/CAA Journal of Automatica Sinica, and Chinese Journal of Command and Control. Since 1997, he has served as General or Program Chair of more than 20 IEEE, INFORMS, ACM, and ASME conferences. He was the President of IEEE ITS Society (2005-2007), Chinese Association for Science and Technology (CAST, USA) in 2005, the American Zhu Kezhen Education Foundation (2007-2008), and the Vice President of the ACM China Council (2010-2011). Since 2008, he has been the Vice President and Secretary General of Chinese Association of Automation. Dr. Wang has been elected as Fellow of IEEE, INCOSE, IFAC, ASME, and AAAS. In 2007, he received the National Prize in Natural Sciences of China and was awarded the Outstanding Scientist by ACM for his research contributions in intelligent control and social computing. He received IEEE ITS Outstanding Application and Research Awards in 2009, 2011 and 2015, and IEEE SMC Norbert Wiener Award in 2014.

Nan-Ning Zheng graduated from the Department of Electrical Engineering, Xi'an Jiaotong University, Xi'an, China, in 1975, and received the M.S. degree in information and control engineering from Xi'an Jiaotong University in 1981, and the Ph.D. degree in electrical engineering from Keio University, Yokohama, Japan, in 1985. He joined Xi'an Jiaotong University in 1975, and he is currently a Professor and the Director of the Institute of Artificial Intelligence and Robotics. His research interests include computer vision, pattern recognition and image processing, and hardware implementation of intelligent systems. Prof. Zheng became a member of the Chinese Academy of Engineering in 1999, and he is the Chinese Representative on the Governing Board of the International Association for Pattern Recognition. He also serves as the President of Chinese Association of Automation.

Dongpu Cao received the Ph.D. degree from Concordia University, Canada, in 2008. He is currently a Senior Lecturer at the Advanced Vehicle Engineering Center, Cranfield University, UK. His research focuses on vehicle dynamics/control and intelligence, automated driving and parallel driving, where he has contributed more than 120 publications and 1 US patent. He received the ASME AVTT'2010 Best Paper Award and 2012 SAE Arch T. Colwell Merit Award. Dr. Cao serves as an Associate Editor for IEEE Transactions on Intelligent Transportation Systems, IEEE Transactions on Vehicular
Technology and IEEE Transactions on Industrial Electronics. He has been a Guest Editor forVehicle System Dynamics, IEEE/ASME Transactions on Mechatronics and IEEETransactions on Human-Machine Systems. He has been serving on the SAE International Vehicle Dynamics Standards Committee and a few ASME, SAE, IEEE technical committees.

Clara Marina Martinez received her Ph.D. degree at Advance Vehicle Engineering Centre, Cranfield University, UK, in 2017. She obtained the 5-years degree in Industrial Engineering from Seville University, Spain, and the MSc degree in automotive mechatronics from Cranfield University in 2014. She will be joining Porsche Engineering R&D Center, Germany, in Nov. 2017. Her current research focuses on intelligent control for electrified vehicles, driving style recognition, future speed prediction, and machine learning. She has published over 10 papers.

Li Li is currently an Associate Professor with the Department of Automation, Tsinghua University, Beijing, China, working in the fields of complex and networked systems, intelligent control and sensing, intelligent transportation systems, and intelligent vehicles. Dr. Li had published more than 50 SCI indexed international journal papers and more than 50 international conference papers as a first/corresponding author. He serves as an associate editor of IEEE Transactions on Intelligent Transportation Systems.

Teng Liu received the B.S. degree in mathematics from Beijing Institute of
Technology, Beijing, China, 2011. He received his Ph.D. degree in the vehicle engineering from Beijing Institute of Technology (BIT), Beijing, in 2017. Dr. Liu is now a postdoctoral research fellow at the Institute of Automation, Chinese Academy of Sciences, China. His current research focuses on parallel driving, parallel reinforcement learning, automated driving, and energy management of electrified vehicles. He has published over 20 papers in these areas.
来源:JAS自动化学报英文版