【泡泡一分钟】三维视觉的连续符号距离函数(3dv-52)
每天一分钟,带你读遍机器人顶级会议文章
标题:Continuous Signed Distance Functions for 3D Vision
作者:Simen Haugo, Annette Stahl, Edmund Brekke
来源:3dv 2017 ( International Conference on 3D Vision)
播音员:Amy
编译:张建 周平
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

我们探索使用连续符号距离函数作为三维视觉的对象表示。
在程序计算机图形学中,这种表示将三维物体定义为几何图元,与构造性立体几何相结合,并由非线性变形、缩放、旋转或平移的变换所得。
不像离散的方式,在密集的三维重建中变得重要,连续距离函数不是作为采样体积存储的,而是作为一个封闭的数学表达式。
我们认为,这表示可以为三维视觉带来几个好处,比如能够描述每个类几百字节级别的很多类室内和室外的物体,免费地获得参数化形状变化。
作为一个距离函数,这种表示也有计算方面的用途,通过在空间的每一点定义最近的表面的方向和距离,以及一个点是在表面的内部或外部。

(a)由图元组合而成的家具

(b)通过调整参数产生的变化
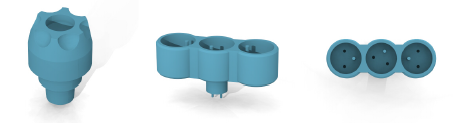
(c)对称和重复的机械部件

(d)由立方体和圆柱体平滑地组合而成的汽车。
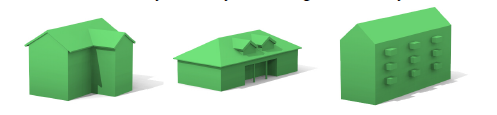
(e)对称、重复和形状复制的房屋
通过将几何图元与构造性立体几何相结合而形成的对象,让能够描述许多人造物体的表达模型语言成为可能,并利用对称性和重复细节。
每个对象都是由一个封闭的数学表达式定义的,该表达式可以以100字节指令的级别存储在编译的字节码中,并且通过控制定义图元的参数和组合它们的操作,可以产生无限多的变化。
Abstract
We explore the use of continuous signed distance functions as an object representation for 3D vision. Popularized in procedural computer graphics, this representation defines 3D objects as geometric primitives combined with constructive solid geometry and transformed by nonlinear deformations, scaling, rotation or translation. Unlike its discretized counterpart, that has become important in dense 3D reconstruction, the continuous distance function is not stored as a sampled volume, but as a closed mathematical expression. We argue that this representation can have several benefits for 3D vision, such as being able to describe many classes of indoor and outdoor objects at the order of hundreds of bytes per class, getting parametrized shape variations for free. As a distance function, the representation also has useful computational aspects by defining, at each point in space, the direction and distance to the nearest surface, and whether a point is inside or outside the surface.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
在【泡泡机器人SLAM】公众号(paopaorobot_slam)中回复关键字“3dv-52”,即可获取本文下载链接。


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



