自动驾驶需要什么样的地图?Momenta分享三大场景下的高精地图应用实战
“什么是好的高精度地图?”
“一定是符合客户和市场需求的。我们不仅是高精度地图技术的服务商,同时也是第一手使用者。这种特殊的行业定位能够让我们站在真实客户角度挖掘需求,第一时间进行产品设计和迭代,从而驱使我们能用自动驾驶思维打磨出更符合行业需求的高精度地图产品。”
—— Momenta CEO 曹旭东

高精度地图使用中的三大难点
近两年,随着凯迪拉克CT6和Audi A8上市,高精度地图已经成为L2.5及以上的自动驾驶系统量产的关键环节。
未来十年可以预见的是,随着技术和市场的成熟,所有上市的新车都有望搭载L2.5以及更高级别的自动驾驶系统,这意味着每年数千万新车的增量市场。
伴随高精度地图搭载应用于自动驾驶车辆,地图的更新也将成为自动驾驶汽车所需的一项持续的服务。
而今天在高精度地图领域,OEM们作为高精度地图的使用者却普遍要面临三个问题:
太昂贵。基于激光雷达的传统制图方式价格昂贵,难以大规模铺开,最终制图的成本会转嫁到OEM身上,使用门槛高;
不敢用。不同于传统的导航地图,高精度地图服务于机器,任何信息错误都有可能导致致命的事故,因此确保高精度地图提供的信息是安全可靠尤为重要;
不会用。高精度地图的发展尚处于早期阶段,行业中真实应用高精度地图的经验有限,且大部分用户对于高精度地图产品还未形成非常清晰的需求。
解决三大问题
1. 太昂贵
传统图商采用以LiDAR为主的建图方式,其采集车的硬件系统造价就达到数百万元,因此高精度地图的绘制成本高昂。同时,以LiDAR为主的采集方案也难以进行规模化部署,因此无法满足高精度地图大规模且快速更新的要求。
Momenta利用以视觉为主的方案来解决这个问题,摄像头的成本低廉,能够支持规模化和众包部署。目前Momenta已经研发了一套基于视觉的低成本的设备,能够在保证质量的前提下实现地图的创建和大规模更新。
2. 不敢用
自动驾驶对于高精度地图有很高的精度与更新频率的要求。而针对高精度地图所提供的信息精度,传统利用LiDAR测绘车队进行采集的方式,难以进行批量大规模的精度验证;同时,由于建立规模测绘车队并持续运营的成本高昂,其所提供的高精度地图也难以进行快速的更新。
这样的地图会给使用的OEM造成两个困扰:
第一,高精度地图所提供的元素信息是否是精准的?这些元素信息需要大规模的验证。
第二,高精度地图所提供的元素信息是否过时了?假设是一张数月甚至一年以前的地图,它所提供的信息有很大的滞后风险。
Momenta通过视觉众包的方式,可以实现从发现信息变化到质量验证测试的完整流程,能够快速大规模地实现高精度地图的更新,由此来保障高精度地图的安全性。
3. 不会用
作为一项非常新兴的技术,大部分高精度地图的用户真实应用地图的经验依然有限。Momenta通过自研的多个不同级别的自动驾驶解决方案,打通从感知 - 高精度地图 – 决策规划 – 控制的完整链条。在这个过程中,Momenta能够准确地定义不同自动驾驶场景下对于高精度地图的需求,并且通过真实的应用来验证这些需求。
真实自动驾驶应用验证高精度地图的需求
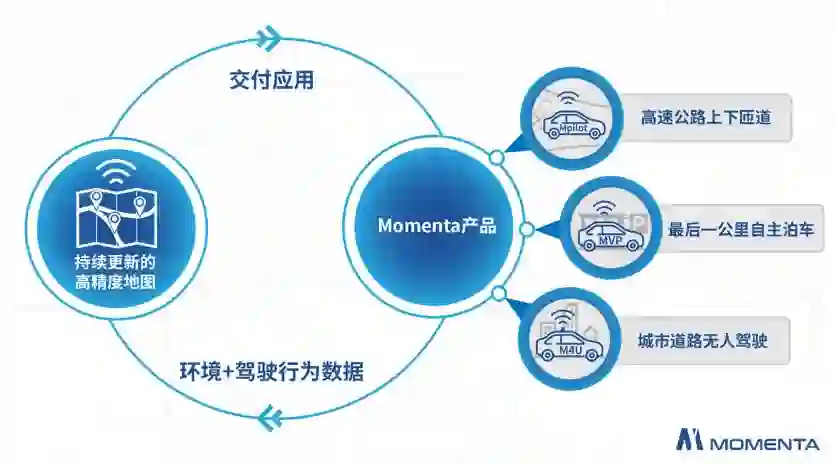
Momenta自有的多个不同级别的自动驾驶解决方案包括:面向高速公路与城市环路可实现上下匝道的Mpilot,最后一公里停车场环境实现自主泊车的MVP,以及针对城市道路实现无人驾驶的M4U。
1. 高速公路实现上下匝道
以高速公路中上下匝道的场景为例,Momenta发现高精度地图不仅仅需要记录道路上的各种属性信息——仅仅依赖道路属性信息是不能做到“完美”驾驶的。

比如当进入匝道时,部分路段只在起始点设置了“开始限速”的信息却没有“解除限速”的信息。在另一些路段中,公交车道的末端非常靠近匝道,如果等到公交车道完全结束,自动驾驶车辆才开始变道,就几乎不可能成功进入匝道。
在高精度地图应用中,如果自动驾驶车辆完全按照道路标志行驶的话,在实际道路上会显得“格格不入” ,甚至有的时候反而会造成不安全的状况。因此Momenta根据这些实际场景中的反馈,在高精度地图中添加了“经验图层”。
“经验图层”的数据来源于众包车辆。在这个经验图层中,我们可以看到大多数车在什么地方开始向匝道并线、在什么地方开始加速等等。有了这些信息,自动驾驶系统就能很好地适应实际道路,像一个“老司机”开车,兼顾安全与体验。
2. 城市道路十字路口

红绿灯检测是城市道路自动驾驶(M4U)中一个常见的问题。红绿灯的检测往往容易出现几类困难:首先是容易误检,比如将车辆红色的尾灯误识为红灯,或者在连续的红绿灯路口错误读取了下一个路口的红绿灯;其次,在图像空间进行红绿灯检测可能需要大计算量,此时检测速度不会很快。
Momenta通过这样的实际问题,来充分定义自动驾驶对于红绿灯这一地图元素的规格以及精度等需求。通过高精度地图记录的红绿灯数据信息,并结合定位信息,自动驾驶车辆可以精确锁定红绿灯检测算法在图像上的检测范围,从而降低感知识别的计算量,加快红绿灯检测的速度,同时解决误检的问题。在这个过程中,针对红绿灯的数据精度应是厘米级的。
在城市道路十字路口的自动驾驶中,通过众包获取到的海量轨迹数据可以让车辆更自然和安全地驾驶。以路口连接线为例,算法可以根据车道的转向逻辑关系生成平滑的几何曲线,但这些生成的曲线与人类司机的实际行驶轨迹有较大差异。通过众包设备获得大量轨迹数据,经聚类处理后,生成更加接近于人类驾驶习惯的参考轨迹线,这样应用到路径规划可以让自动驾驶更加自然,同时预测其它车辆的轨迹也更加精准。
3. 最后一公里地下车库自主泊车

在地库实现自主泊车的场景中,国内很多地下停车场照明会使用感应灯。当人或车接近时灯光才亮起,离开时灯光变暗,光照由此会发生剧烈变化。同时地库GPS信号很差,仅仅使用普通特征点地图,从不同的视角观察,图像特征点的特性变化很大,定位失效率很高。一旦定位失效,泊车就无法进行。
Momenta使用更高层抽象能力的语义信息来进行视觉地图的创建,语义信息是不随灯光、时间及视角变化,具有高辨识度的信息。Momenta利用深度学习感知能力,可以在剧烈变化的环境中稳定可靠地检测出高层次的抽象语义信息。随后,利用语义SLAM技术,构建出完整的停车场语义地图。拥有了完整的语义地图指引,车辆就能轻松地在地库中完成鲁棒性很高的高精度定位任务,泊车定位失效率降到万分之一。
打造懂得自动驾驶的“活地图”
高精度地图对于Momenta而言,不单单是支持自动驾驶解决方案的基础,同时地图本身也是极其重要的一块业务。公司从创办的第一天起就打定主意一定要做高精度地图,不但服务自己的产品线,也为行业赋能。Momenta的定位是“打造自动驾驶的大脑”,高精度地图是这个“大脑”的重要组成部分。
地图上游连接感知,下游则驱动规划和控制。只有通过研发高精度地图技术,Momenta才能打通自动驾驶一整条链条。另一方面,各个解决方案通过使用高精度地图,可以获得环境和驾驶行为的数据,这些数据未来在大出行和大物流领域能够发挥巨大的价值。通过众包获得的数据,Momenta可以积累千亿公里的驾驶经验,从而驱动驾驶决策算法,让自动驾驶成为比“老司机”更可靠的智能司机。
点击了解更多Momenta信息
END

Momenta全球热招中,欢迎顶尖人才加入
点击「阅读原文」查看所有全职/实习岗位



