一文教你如何用PyTorch构建 Faster RCNN
本文为 AI 研习社编译的技术博客,原标题 :
Guide to build Faster RCNN in PyTorch
作者 | Machine-Vision Research Group
翻译 | 邓普斯•杰弗、麦尔肯•诺埃、莫青悠
校对 | 邓普斯•杰弗 审核 | 酱番梨 整理 | 菠萝妹
原文链接:
https://medium.com/@fractaldle/guide-to-build-faster-rcnn-in-pytorch-95b10c273439
注:本文共31000+字,建议收藏阅读。相关链接请点击文末【阅读原文】进行访问。
一文教你如何用PyTorch构建 Faster RCNN
引言
Faster R-CNN是首次完全采用Deep Learning的学习框架之一。Faster R-CNN是基于Fast RCNN的思路,然而Fast RCNN却继承自RCNN,SPP-Net的思路(译者注:此处理清楚先后关系)。虽然我们在构建Faster RCNN框架时引入了一些Fast RCNN的思想,但是我们不会详细讨论这些框架。其中一个原因是,Faster R-CNN表现得非常好,它没有使用传统的计算机视觉技术,如选择性搜索等。在非常高的层次上,Fast RCNN和Faster RCNN的工作原理如下面的流程图所示。
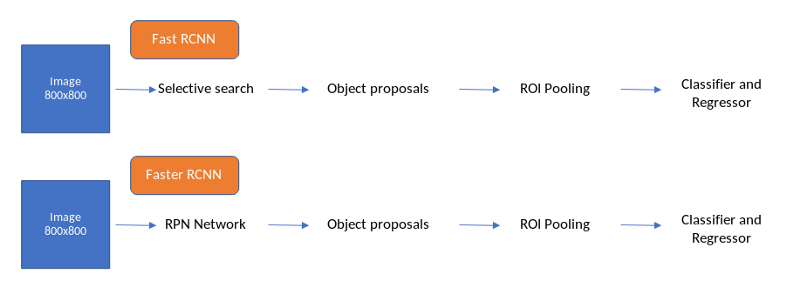
Fast RCNN和Faster RCNN
我们写过一篇关于目标检测框架的详细的博客,可以作为独自编码理解Faster RCNN的指导。
上图可以看到唯一的区别是Faster RCNN中将selective search替换为RPN(Region Proposal Network),selective search算法采用SIFT和HOG描述子来生成目标候选,在CPU上2秒/张图像。这一过程代价高,Fast RCNN在一张图像上总共耗费2.3秒产生预测,Faster RCNN速度为5 FPS(每秒的帧数),即使在后端使用非常深入的图像分类器,如VGGnet(现在也使用ResNet和ResNext)。
因此,为了从零开始构建Faster RCNN,需要明确理解以下4个主题(流程):
Region Proposal network (RPN)
RPN loss functions
Region of Interest Pooling (ROI)
ROI loss functions
RPN还引入了一个新的概念:Anchor boxes,这成为构建目标检测框架的一个黄金准则。下面我们深入理解目标检测框架的不同步骤在Faster RCNN中如何发挥作用。
在训练Faster RCNN时通常的数据流如下:
从图像中提取特征;
产生anchor目标;
RPN网络中得到位置和目标预测分值;
取前N个坐标及其目标得分即建议层;
传递前N个坐标通过Fast R-CNN网络,生成4中建议的每个位置的位置和cls预测;
对4中建议的每个坐标生成建议目标;
采用2,3计算rpn_cls_loss和rpn_reg_loss;
采用5,6计算roi_cls_loss和roi_reg_loss;
配置VGG16作为实验后期的网络,可以用相似的方式采用其他任意的分类网络。
特征提取
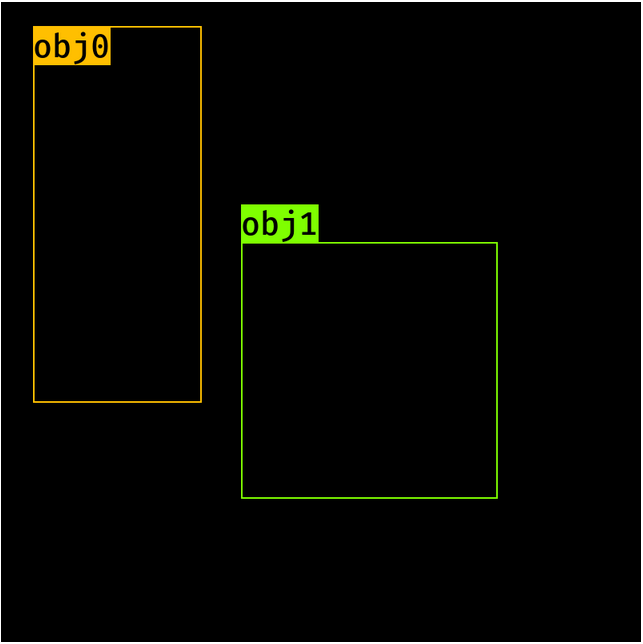
我们从一张图像和一组边界框开始,其标签定义如下:
import torch
image = torch.zeros((1, 3, 800, 800)).float()
bbox = torch.FloatTensor([[20, 30, 400, 500], [300, 400, 500, 600]])
# [y1, x1, y2, x2] format
labels = torch.LongTensor([6, 8]) # 0 represents background
sub_sample = 16
VGG16网络作为特征提取模块,这是RPN和Fast RCNN的支柱,为此需要对VGG16网络进行修改,网络输入为800,特征提取模块的输出的特征图尺寸为(800//16),因此需要保证VGG16模块可以得到这样的特征图储存并且将网络修剪整齐,可以通过如下方式实现:
创建一个dummy image,并将volatile设置为False;
列出VGG16所有的层;
当图像(feature map)的output_size低于所需的级别(800//16)时,将图像传递到各个层并对列表取子集;
将list转换为Sequential module;
来看看每个步骤:
1. 生成一个dummy image并且设置volatile为False:
import torchvision
dummy_img = torch.zeros((1, 3, 800, 800)).float()
print(dummy_img)
#Out: torch.Size([1, 3, 800, 800])
2. 列出VGG16的所有层:
model = torchvision.models.vgg16(pretrained=True)
fe = list(model.features)
print(fe) # length is 15
# [Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
# ReLU(inplace),
# Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
# ReLU(inplace),
# MaxPool2d(kernel_size=(2, 2), stride=(2, 2), dilation=(1, 1), ceil_mode=False),
# Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
# ReLU(inplace),
# Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
# ReLU(inplace),
# MaxPool2d(kernel_size=(2, 2), stride=(2, 2), dilation=(1, 1), ceil_mode=False),
# Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
# ReLU(inplace),
# Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
# ReLU(inplace),
# Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
# ReLU(inplace),
# MaxPool2d(kernel_size=(2, 2), stride=(2, 2), dilation=(1, 1), ceil_mode=False),
# Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
# ReLU(inplace),
# Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
# ReLU(inplace),
# Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
# ReLU(inplace),
# MaxPool2d(kernel_size=(2, 2), stride=(2, 2), dilation=(1, 1), ceil_mode=False),
# Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
# ReLU(inplace),
# Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
# ReLU(inplace),
# Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
# ReLU(inplace),
# MaxPool2d(kernel_size=(2, 2), stride=(2, 2), dilation=(1, 1), ceil_mode=False)]
3. 将图像传输通过所有层,确定得到相应的尺寸:
req_features = []
k = dummy_img.clone()
for i in fe:
k = i(k)
if k.size()[2] < 800//16:
break
fee.append(i)
out_channels = k.size()[1]
print(len(req_features)) #30
print(out_channels) # 512
4. 将list转换为Sequential module:
faster_rcnn_fe_extractor = nn.Sequential(*req_features)
现在faster_rcnn_fe_extractor可以作为后端,计算特征:
out_map = faster_rcnn_fe_extractor(image)
print(out_map.size())
#Out: torch.Size([1, 512, 50, 50])
Anchor boxes
这是我们第一次遇到anchor boxes。详细理解将使我们能够非常容易地理解目标检测。所以让我们详细谈谈这是如何做到的。
在一个feature map的坐标上生成Anchor;
在所有feature map的坐标上生成Anchor;
对每个目标分配标签及坐标(相对于anchor);
在feature map坐标生成Anchor;
将采用anchor_scales=8,16,32,ratio=0.5,1,2,sub sampling=16(因为我们将图像从800像素池化至50像素)。输出的feature map的每个像素对应图像中的16*16像素,如下图所示:
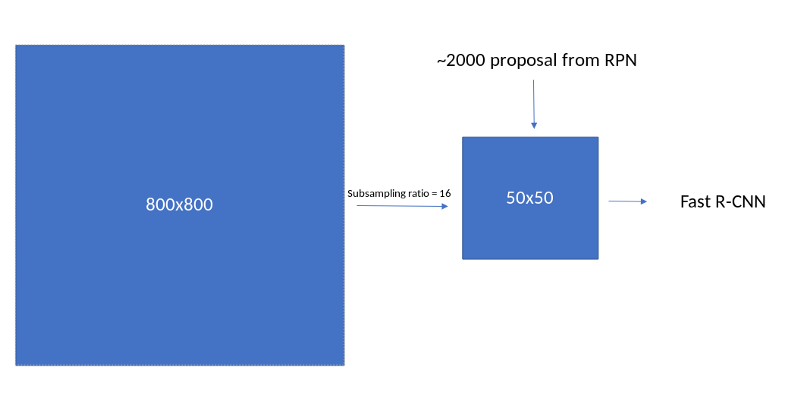
image to feature map mapping
我们需要首先在这个16 * 16像素上生成锚框,然后沿着x轴和y轴进行类似的操作,以获得所有的anchor boxes。这在步骤2中完成。
feature map的每个像素位置生成9个anchor boxes(anchor_scales的数量和ratio的数量),每个anchor box具有‘y1’,‘x1’,‘y2’,‘x2’。因此每个位置anchor会具有形状(9,4)。开始为一个空的全0的数组。
import numpy as np
ratio = [0.5, 1, 2]
anchor_scales = [8, 16, 32]
anchor_base = np.zeros((len(ratios) * len(scales), 4), dtype=np.float32)
print(anchor_base)
#Out:
# array([[0., 0., 0., 0.],
# [0., 0., 0., 0.],
# [0., 0., 0., 0.],
# [0., 0., 0., 0.],
# [0., 0., 0., 0.],
# [0., 0., 0., 0.],
# [0., 0., 0., 0.],
# [0., 0., 0., 0.],
# [0., 0., 0., 0.]], dtype=float32)
让我们用相应的y1、x1、y2、x2填充这些值。我们的这个基础anchor的中心将在:
ctr_y = sub_sample / 2.
ctr_x = sub_sample / 2.
print(ctr_y, ctr_x)
# Out: (8, 8)
for i in range(len(ratios)):
for j in range(len(anchor_scales)):
h = sub_sample * anchor_scales[j] * np.sqrt(ratios[i])
w = sub_sample * anchor_scales[j] * np.sqrt(1./ ratios[i])
index = i * len(anchor_scales) + j
anchor_base[index, 0] = ctr_y - h / 2.
anchor_base[index, 1] = ctr_x - w / 2.
anchor_base[index, 2] = ctr_y + h / 2.
anchor_base[index, 3] = ctr_x + w / 2.
#Out:
# array([[ -37.254833, -82.50967 , 53.254833, 98.50967 ],
# [ -82.50967 , -173.01933 , 98.50967 , 189.01933 ],
# [-173.01933 , -354.03867 , 189.01933 , 370.03867 ],
# [ -56. , -56. , 72. , 72. ],
# [-120. , -120. , 136. , 136. ],
# [-248. , -248. , 264. , 264. ],
# [ -82.50967 , -37.254833, 98.50967 , 53.254833],
# [-173.01933 , -82.50967 , 189.01933 , 98.50967 ],
# [-354.03867 , -173.01933 , 370.03867 , 189.01933 ]],
# dtype=float32)
这些是第一个feature map像素的Anchor位置,我们现在必须在feature map的所有位置生成这些anchor。还要注意,negitive值表示anchor boxes在图像维度之外。在后面的部分中,我们将用-1标记它们,并在计算函数损失和生成Anchor建议时删除它们。而且由于我们在每个位置都有9个Anchor,并且在一个图像中有50 * 50个这样的位置,我们总共会得到17500个(50 * 50 * 9) Anchor。让我们现在生成其他Anchor 。(译者注:此处生成的是备选Anchor,即所有可能的Anchor)
2. 在所有特征图位置生成Anchor
为了实现这一目标,首先需要为每个feature map像素生成中心(复原到原始图像的位置点):
fe_size = (800//16)
ctr_x = np.arange(16, (fe_size+1) * 16, 16)
ctr_y = np.arange(16, (fe_size+1) * 16, 16)
遍历ctr_x和ctr_y可以得到每个位置的中心,代码如下:
For x in shift_x:
For y in shift_y:
Generate anchors at (x, y) locations
anchor中心可视化如下:
图像中的anchor中心
采用python生成中心:
index = 0
for x in range(len(ctr_x)):
for y in range(len(ctr_y)):
ctr[index, 1] = ctr_x[x] - 8
ctr[index, 0] = ctr_y[y] - 8
index +=1
输出将是每个位置的(x, y)值,如上图所示。我们总共有2500个锚点。现在我们需要在每个中心生成anchor boxes。这可以使用我们在一个位置生成锚的代码来完成,为提供每个anchor中心的代码添加一个提取for循环就可以了。让我们看看这是怎么做的:
anchors = np.zeros((fe_size * fe_size * 9), 4)
index = 0
for c in ctr:
ctr_y, ctr_x = c
for i in range(len(ratios)):
for j in range(len(anchor_scales)):
h = sub_sample * anchor_scales[j] * np.sqrt(ratios[i])
w = sub_sample * anchor_scales[j] * np.sqrt(1./ ratios[i])
anchors[index, 0] = ctr_y - h / 2.
anchors[index, 1] = ctr_x - w / 2.
anchors[index, 2] = ctr_y + h / 2.
anchors[index, 3] = ctr_x + w / 2.
index += 1
print(anchors.shape)
#Out: [22500, 4]
注:为了简单起见,我让这段代码看起来非常冗长。有更好的方法来生成anchor boxes。
这会成为图像最终的anchor用于后续的步骤,下面可视化这些anchor如何 在图像上传播。
anchor boxes at (400, 400):
一张图像中所有有效的anchor boxes示意图
1. 分配目标标签和位置给每个anchor
现在,由于我们已经生成了所有的anchor boxes,我们需要查看图像中的目标,并将它们分配给包含它们的特定anchor boxes。Faster_R-CNN有一些给anchor boxes分配标签的指导原则。
我们给两种anchor分配了正标签:
a)与ground-truth-box重叠度最高的Intersection-over-Union (IoU)的anchor;
b)与ground-truth box 的IoU重叠度大于0.7的anchor。
注意,单个ground-truth对象可以为多个anchor分配正标签。
c)对所有与ground-truth box的IoU比率小于0.3的anchor标记为负标签;
d)anchor既不是正样本的也不是负样本,对训练没有帮助。
让我们看看这是怎么做的。
bbox = np.asarray([[20, 30, 400, 500], [300, 400, 500, 600]],
dtype=np.float32) # [y1, x1, y2, x2] format
labels = np.asarray([6, 8], dtype=np.int8) # 0 represents background
通过如下方式对anchor boxes分配标签和位置:
找到有效的anchor boxes的索引,并且生成索引数组,生成标签数组其形状索引数组填充-1(无效anchor boxes,对应上文说的处在边框外的anchor boxes)。
检查是否满足以上a、b、c条件中的一条,并相应填写标签。如果是正anchor box(标签为1),注意哪个ground-truth目标可以得到这个结果。
计算与anchor box相关的ground-truth的位置(loc)。
通过为所有无效的anchor box填充-1和为所有有效锚箱计算的值来重新组织所有锚箱。
输出应该是(N, 1)数组的标签和带有(N, 4)数组的locs。
找到所有有效anchor boxes的索引:
index_inside = np.where(
(anchors[:, 0] >= 0) &
(anchors[:, 1] >= 0) &
(anchors[:, 2] <= 800) &
(anchors[:, 3] <= 800)
)[0]
print(index_inside.shape)
#Out: (8940,)
生成空的标签数组,大小为inside_index,填充-1,默认设置为(d):
label = np.empty((len(inside_index), ), dtype=np.int32)
label.fill(-1)
print(label.shape)
#Out = (8940, )
生成有效anchor boxes数组:
valid_anchor_boxes = anchors[inside_index]
print(valid_anchor_boxes.shape)
#Out = (8940, 4)
对每个有效anchor box计算与每个ground-truth目标的iou。因为我们有8940个anchor boxes和2个ground-truth目标,应该得到(8940,2)的数组作为输出。两个框之间iou计算的代码如下:
- Find the max of x1 and y1 in both the boxes (xn1, yn1)
- Find the min of x2 and y2 in both the boxes (xn2, yn2)
- Now both the boxes are intersecting only
if (xn1 < xn2) and (yn2 < yn1)
- iou_area will be (xn2 - xn1) * (yn2 - yn1)
else
- iuo_area will be 0
- similarly calculate area for anchor box and ground truth object
- iou = iou_area/(anchor_box_area + ground_truth_area - iou_area)
计算iou的python代码如下:
ious = np.empty((len(valid_anchors), 2), dtype=np.float32)
ious.fill(0)
print(bbox)
for num1, i in enumerate(valid_anchors):
ya1, xa1, ya2, xa2 = i
anchor_area = (ya2 - ya1) * (xa2 - xa1)
for num2, j in enumerate(bbox):
yb1, xb1, yb2, xb2 = j
box_area = (yb2- yb1) * (xb2 - xb1)
inter_x1 = max([xb1, xa1])
inter_y1 = max([yb1, ya1])
inter_x2 = min([xb2, xa2])
inter_y2 = min([yb2, ya2])
if (inter_x1 < inter_x2) and (inter_y1 < inter_y2):
iter_area = (inter_y2 - inter_y1) * \
(inter_x2 - inter_x1)
iou = iter_area / \
(anchor_area+ box_area - iter_area)
else:
iou = 0.
ious[num1, num2] = iou
print(ious.shape)
#Out: [22500, 2]
注意:采用numpy数组,可以使计算效率更高并且冗余更少。然而,我们这样做的原因是可以使没有很强的代数知识的人也能理解。
考虑a和b的情况,我们需要找到两件事
每个gt_box及其对应的anchor box的最高iou;
每个anchor box及其对应的ground-truth box的最高iou;
case-1:
gt_argmax_ious = ious.argmax(axis=0)
print(gt_argmax_ious)
gt_max_ious = ious[gt_argmax_ious, np.arange(ious.shape[1])]
print(gt_max_ious)
# Out:
# [2262 5620]
# [0.68130493 0.61035156]
case-2:
argmax_ious = ious.argmax(axis=1)
print(argmax_ious.shape)
print(argmax_ious)
max_ious = ious[np.arange(len(inside_index)), argmax_ious]
print(max_ious)
# Out:
# (22500,)
# [0, 1, 0, ..., 1, 0, 0]
# [0.06811669 0.07083762 0.07083762 ... 0. 0. 0. ]
找到具有max_ious的anchor_boxes(gt_max_ious):
gt_argmax_ious = np.where(ious == gt_max_ious)[0]
print(gt_argmax_ious)
# Out:
# [2262, 2508, 5620, 5628, 5636, 5644, 5866, 5874, 5882, 5890, 6112,
# 6120, 6128, 6136, 6358, 6366, 6374, 6382]
至此有3个数组:
argmax_ious——确定哪个ground-truth目标与每个anchor都有最大的iou;
max_ious——确定ground-truth目标与每个anchor的max_iou;
gt_argmax_ious——确定与ground-truth box有最大的IoU重叠的anchor。
用argmax_ious和max_ious可以为满足[b],[c]的anchor box分配标签和位置,使用gt_argmax_iou,我们可以为anchor box分配标签和位置,以满足[a]。
对一些变量施加阈值:
pos_iou_threshold = 0.7
neg_iou_threshold = 0.3
分配负标签(0)给max_iou小于负阈值[c]的所有anchor boxes:
label[max_ious < neg_iou_threshold] = 0
分配正标签(1)给与ground-truth box[a]的IoU重叠最大的anchor boxes:
label[gt_argmax_ious] = 1
分配正标签(1)给max_iou大于positive阈值[b]的anchor boxes:
label[max_ious >= pos_iou_threshold] = 1
训练RPN,Faster_R-CNN文章描述如下:
每个mini-batch都来自包含许多正样本和负样本anchor的单个图像,但这将偏向负样本,因为它们占主导地位。相反,我们随机采样图像中的256个anchor来计算mini-batch的损失函数,其中被采样的正锚点和负锚点的比例高达1:1。如果一幅图像中有少于128个正样本,我们就用负样本填充mini-batch图像。由此我们可以推出两个变量如下 :
pos_ratio = 0.5
n_sample = 256
所有的正样本 :
n_pos = pos_ratio * n_sample
现在我们需要从正标签中随机采样n_pos个样本,忽略(-1)剩余的样本。在一些情况下,得到少于n_pos个样本,此时随机采样(n_sample-n_pos)个负样本(0),忽略剩余的anchor boxes,用如下代码实现:
positive samples
pos_index = np.where(label == 1)[0]
if len(pos_index) > n_pos:
disable_index = np.random.choice(pos_index, size=(len(pos_index) - n_pos), replace=False)
label[disable_index] = -1
negative samples
n_neg = n_sample * np.sum(label == 1)
neg_index = np.where(label == 0)[0]
if len(neg_index) > n_neg:
disable_index = np.random.choice(neg_index, size=(len(neg_index) - n_neg), replace = False)
label[disable_index] = -1
anchor boxes 定位
现在让我们用具有最大iou的ground truth对象为每个anchor box分配位置。注意,我们将为所有有效的anchor box分配anchor locs,而不考虑其标签,稍后在计算损失时,我们可以使用简单的过滤器删除它们。
我们已经知道与每个anchor box具有高的iou的ground truth目标,现在我们需要找到ground truth相对于anchor box的坐标。Faster_R-CNN按照如下参数化:
t_{x} = (x - x_{a})/w_{a}
t_{y} = (y - y_{a})/h_{a}
t_{w} = log(w/ w_a)
t_{h} = log(h/ h_a)
x, y , w, h是ground truth box的中心坐标,宽,高。x_a,y_a,h_a,w_a为anchor boxes的中心坐标,宽,高。
对每个anchor box,找到具有max_iou的ground-truth目标:
max_iou_bbox = bbox[argmax_ious]
print(max_iou_bbox)
#Out
# [[ 20., 30., 400., 500.],
# [ 20., 30., 400., 500.],
# [ 20., 30., 400., 500.],
# ...,
# [ 20., 30., 400., 500.],
# [ 20., 30., 400., 500.],
# [ 20., 30., 400., 500.]]
为找到t_{x}, t_{y}, t_{w}, t_{h},需要转换有效的anchor boxes的y1,x1,y2,x2格式和与ground truth boxes相关的ctr_y,ctr_x,h,w格式:
height = valid_anchors[:, 2] - valid_anchors[:, 0]
width = valid_anchors[:, 3] - valid_anchors[:, 1]
ctr_y = valid_anchors[:, 0] + 0.5 * height
ctr_x = valid_anchors[:, 1] + 0.5 * width
base_height = max_iou_bbox[:, 2] - max_iou_bbox[:, 0]
base_width = max_iou_bbox[:, 3] - max_iou_bbox[:, 1]
base_ctr_y = max_iou_bbox[:, 0] + 0.5 * base_height
base_ctr_x = max_iou_bbox[:, 1] + 0.5 * base_width
用上述公式找到位置:
eps = np.finfo(height.dtype).eps
height = np.maximum(height, eps)
width = np.maximum(width, eps)
dy = (base_ctr_y - ctr_y) / height
dx = (base_ctr_x - ctr_x) / width
dh = np.log(base_height / height)
dw = np.log(base_width / width)
anchor_locs = np.vstack((dy, dx, dh, dw)).transpose()
print(anchor_locs)
#Out:
# [[ 0.5855727 2.3091455 0.7415673 1.647276 ]
# [ 0.49718437 2.3091455 0.7415673 1.647276 ]
# [ 0.40879607 2.3091455 0.7415673 1.647276 ]
# ...
# [-2.50802 -5.292254 0.7415677 1.6472763 ]
# [-2.5964084 -5.292254 0.7415677 1.6472763 ]
# [-2.6847968 -5.292254 0.7415677 1.6472763 ]]
现在得到anchor_locs和与每个有效的anchor boxes相关的标签
用inside_index变量将他们映射到原始的anchors,无效的anchor box标签填充-1(忽略),位置填充0。
最终的标签:
anchor_labels = np.empty((len(anchors),), dtype=label.dtype)
anchor_labels.fill(-1)
anchor_labels[inside_index] = label
最终的坐标:
anchor_locations = np.empty((len(anchors),) + anchors.shape[1:], dtype=anchor_locs.dtype)
anchor_locations.fill(0)
anchor_locations[inside_index, :] = anchor_locs
最终的两个矩阵为:
anchor_locations [N, 4] — [22500, 4]
anchor_labels [N,] — [22500]
这用于RPN网络的输入目标,下节可以看到RPN网络如何设计。
Region Proposal Network(RPN网络)
正如之前讨论,在先前的研究中,通过selective search,CPMC, MCG, EdgeBoxes等方法生成网络的region proposals。Faster R-CNN是第一个采用深度学习生成region proposals的方法。
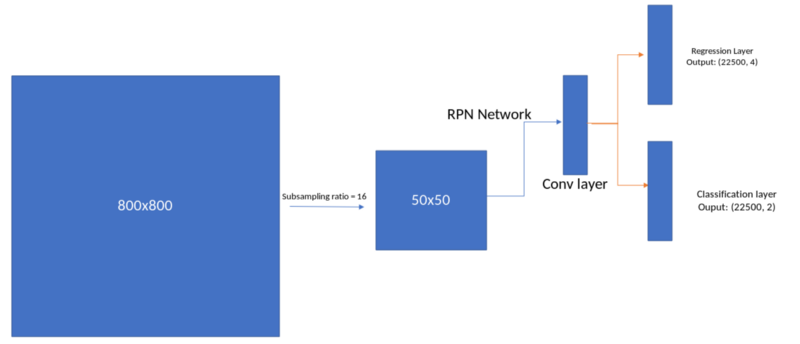
RPN Network
网络包括一个卷积模块,在卷积模块下一层包括一个回归层,预测anchor中的box的位置。
为生成region proposals,在特征提取模块得到的卷积特征层输出上滑动一个小的网络。这个小网络将输入卷积特征层的n*n空间窗口作为输入,每个滑动窗口映射到更低维的特征[512维特征]。这个特征输入到两个并列的全连接层:
框回归层
框分类层
正如Faster R-CNN文章中所属,采用n=3,采用n*n的卷积层和两个并列的1*1卷积层实现这一框架:
import torch.nn as nn
mid_channels = 512
in_channels = 512 # depends on the output feature map. in vgg 16 it is equal to 512
n_anchor = 9 # Number of anchors at each location
conv1 = nn.Conv2d(in_channels, mid_channels, 3, 1, 1)
reg_layer = nn.Conv2d(mid_channels, n_anchor *4, 1, 1, 0)
cls_layer = nn.Conv2d(mid_channels, n_anchor *2, 1, 1, 0) ## I will
be going to use softmax here. you can equally use sigmoid if u
replace 2 with 1.
文章中,采用均值0,标准差0.01初始化权重,偏差初始化为0,通过如下代码实现:
# conv sliding layer
conv1.weight.data.normal_(0, 0.01)
conv1.bias.data.zero_()
# Regression layer
reg_layer.weight.data.normal_(0, 0.01)
reg_layer.bias.data.zero_()
# classification layer
cls_layer.weight.data.normal_(0, 0.01)
cls_layer.bias.data.zero_()
特征提取过程的输出可以输入到网络中用于预测目标相对anchor的位置和与之相关的目标分值:
x = conv1(out_map) # out_map is obtained in section 1
pred_anchor_locs = reg_layer(x)
pred_cls_scores = cls_layer(x)
print(pred_cls_scores.shape, pred_anchor_locs.shape)
#Out:
#torch.Size([1, 18, 50, 50]) torch.Size([1, 36, 50, 50])
让我们重新格式化一下,让它与我们之前设计的锚点目标对齐。我们还将找到每个anchor box的目标得分用于proposal层,我们将在下一节中讨论:
pred_anchor_locs = pred_anchor_locs.permute(0, 2, 3, 1).contiguous().view(1, -1, 4)
print(pred_anchor_locs.shape)
#Out: torch.Size([1, 22500, 4])
pred_cls_scores = pred_cls_scores.permute(0, 2, 3, 1).contiguous()
print(pred_cls_scores)
#Out torch.Size([1, 50, 50, 18])
objectness_score = pred_cls_scores.view(1, 50, 50, 9, 2)[:, :, :, :, 1].contiguous().view(1, -1)
print(objectness_score.shape)
#Out torch.Size([1, 22500])
pred_cls_scores = pred_cls_scores.view(1, -1, 2)
print(pred_cls_scores.shape)
# Out torch.size([1, 22500, 2])
本节实现以下步骤:
pred_cls_scores和pred_anchor_locs是RPN网络的输出,损失更新权重。
pred_cls_scores和objectness_scores作为proposal层的输入,proposal层生成后续用于RoI网络的一系列proposal,将在下一节中实现。
Generating proposals to feed Fast R-CNN network
proposal函数将采用如下参数:
模式:training_mode还是testing_mode。
nms_thresh。
n_train_pre_nms——训练时nms之前的bbox的数目。
n_train_post_nms——训练时nms之后的bbox的数目。
n_test_pre_nms——测试时nms之前的bbox的数目。
n_test_post_nms——测试时nms之后的bbox的数目。
min_size——生成一个proposal的所需的目标的最小高度。
Faster R-CNN中RPN的proposals彼此之间重叠程度高。为了减少冗余,我们根据proposal区域的cls分数对其进行非最大抑制(non-maximum supression, NMS)。我们将NMS的IoU阈值设置为0.7,这样每个图像就有大约2000个建议区域。经过简化研究,作者表明,NMS不损害最终检测的准确性,但大大减少了建议的数量。在NMS之后,我们使用top-N的建议区域进行检测。后续使用2000个RPN proposals训练Fast R-CNN。在测试期间,他们只评估了300个proposal,他们用不同的数字测试,并得到了如下结果:
nms_thresh = 0.7
n_train_pre_nms = 12000
n_train_post_nms = 2000
n_test_pre_nms = 6000
n_test_post_nms = 300
min_size = 16
我们需要做以下的事情产生网络感兴趣的proposal region。
转换RPN网络的loc预测为bbox[y1,x1,y2,x2]格式。
将预测框剪辑到图像上。
去除高度或宽度
通过分数从高到低排序所有的(proposal, score)对。
取前几个预测框pre_nms_topN(如,训练时12000,测试时300)
采用nms threshold > 0.7。
取前几个预测框pos_nms_topN(如,训练时2000,测试时300)
我们将在本节剩余部分中查看每个阶段:
1. 转换RPN网络的loc预测为bbox[y1,x1,y2,x2]格式。
这是为anchor boxes设置ground truth时的逆操作,该操作通过无参数化及相对图像的偏差来解码预测。公式如下:
x = (w_{a} * ctr_x_{p}) + ctr_x_{a}
y = (h_{a} * ctr_x_{p}) + ctr_x_{a}
h = np.exp(h_{p}) * h_{a}
w = np.exp(w_{p}) * w_{a}
and later convert to y1, x1, y2, x2 format
转换anchor格式从 y1, x1, y2, x2 到 ctr_x, ctr_y, h, w :
anc_height = anchors[:, 2] - anchors[:, 0]
anc_width = anchors[:, 3] - anchors[:, 1]
anc_ctr_y = anchors[:, 0] + 0.5 * anc_height
anc_ctr_x = anchors[:, 1] + 0.5 * anc_width
通过上述公式转换预测locs,在转换之前先将pred_anchor_loc和objectness_score为numpy数组:
pred_anchor_locs_numpy = pred_anchor_locs[0].data.numpy()
objectness_score_numpy = objectness_score[0].data.numpy()
dy = pred_anchor_locs_numpy[:, 0::4]
dx = pred_anchor_locs_numpy[:, 1::4]
dh = pred_anchor_locs_numpy[: 2::4]
dw = pred_anchor_locs_numpy[: 3::4]
ctr_y = dy * anc_height[:, np.newaxis] + anc_ctr_y[:, np.newaxis]
ctr_x = dx * anc_width[:, np.newaxis] + anc_ctr_x[:, np.newaxis]
h = np.exp(dh) * anc_height[:, np.newaxis]
w = np.exp(dw) * anc_width[:, np.newaxis]
转换 [ctr_x, ctr_y, h, w]为[y1, x1, y2, x2]格式:
roi = np.zeros(pred_anchor_locs_numpy.shape, dtype=loc.dtype)
roi[:, 0::4] = ctr_y - 0.5 * h
roi[:, 1::4] = ctr_x - 0.5 * w
roi[:, 2::4] = ctr_y + 0.5 * h
roi[:, 3::4] = ctr_x + 0.5 * w
#Out:
# [[ -36.897102, -80.29519 , 54.09939 , 100.40507 ],
# [ -83.12463 , -165.74298 , 98.67854 , 188.6116 ],
# [-170.7821 , -378.22214 , 196.20844 , 349.81198 ],
# ...,
# [ 696.17816 , 747.13306 , 883.4582 , 836.77747 ],
# [ 621.42114 , 703.0614 , 973.04626 , 885.31226 ],
# [ 432.86267 , 622.48926 , 1146.7059 , 982.9209 ]]
2. 剪辑预测框到图像上:
img_size = (800, 800) #Image size
roi[:, slice(0, 4, 2)] = np.clip(
roi[:, slice(0, 4, 2)], 0, img_size[0])
roi[:, slice(1, 4, 2)] = np.clip(
roi[:, slice(1, 4, 2)], 0, img_size[1])
print(roi)
#Out:
# [[ 0. , 0. , 54.09939, 100.40507],
# [ 0. , 0. , 98.67854, 188.6116 ],
# [ 0. , 0. , 196.20844, 349.81198],
# ...,
# [696.17816, 747.13306, 800. , 800. ],
# [621.42114, 703.0614 , 800. , 800. ],
# [432.86267, 622.48926, 800. , 800. ]]
3. 去除高度或宽度 < threshold的预测框:
hs = roi[:, 2] - roi[:, 0]
ws = roi[:, 3] - roi[:, 1]
keep = np.where((hs >= min_size) & (ws >= min_size))[0]
roi = roi[keep, :]
score = objectness_score_numpy[keep]
print(score.shape)
#Out:
##(22500, ) all the boxes have minimum size of 16
4. 按分数从高到低排序所有的(proposal, score)对:
order = score.ravel().argsort()[::-1]
print(order)
#Out:
#[ 889, 929, 1316, ..., 462, 454, 4]
5. 取前几个预测框pre_nms_topN(如训练时12000,测试时300):
order = order[:n_train_pre_nms]
roi = roi[order, :]
print(roi.shape)
print(roi)
#Out
# (12000, 4)
# [[607.93866, 0. , 800. , 113.38187],
# [ 0. , 0. , 235.29704, 369.64795],
# [572.177 , 0. , 800. , 373.0086 ],
# ...,
# [250.07968, 186.61633, 434.6356 , 276.70615],
# [490.07974, 154.6163 , 674.6356 , 244.70615],
# [266.07968, 602.61633, 450.6356 , 692.7062 ]]
6. 采用nms threshold > 0.7:
第一个问题,什么是非极大抑制?这是一个去除/合并具有极高重叠的边界框的过程。下图中有很多重叠的边界框,想保留一些重叠不多的独特的边界框。阈值设置为0.7,定义去除/合并重叠边界框所需的最小重叠区域面积。
NMS的代码如下:
- Take all the roi boxes [roi_array]
- Find the areas of all the boxes [roi_area]
- Take the indexes of order the probability score in descending order [order_array]
keep = []
while order_array.size > 0:
- take the first element in order_array and append that to keep
- Find the area with all other boxes
- Find the index of all the boxes which have high overlap with this box
- Remove them from order array
- Iterate this till we get the order_size to zero (while loop)
- Ouput the keep variable which tells what indexes to consider.
7. 取前几个边界框pos_nms_topN(如,训练时2000,测试时300):
y1 = roi[:, 0]
x1 = roi[:, 1]
y2 = roi[:, 2]
x2 = roi[:, 3]
area = (x2 - x1 + 1) * (y2 - y1 + 1)
order = scores.argsort()[::-1]
keep = []
while order.size > 0
i = order[0]
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
w = np.maximum(0.0, xx2 - xx1 + 1)
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
ovr = inter / (areas[i] + areas[order[1:]] - inter)
inds = np.where(ovr <= thresh)[0]
order = order[inds + 1]
keep = keep[:n_train_post_nms] # while training/testing , use accordingly
roi = roi[keep] # the final region proposals
最后得到了region proposals,这被用作Fast_R-CNN的输入,最终用于预测目标的位置(相对于建议的框)和目标的类别(每个proposal的分类)。首先,我们研究如何为训练网络的proposal制定目标。之后,我们将研究fast r-cnn网络是如何实现的,并将这些proposal传递给网络以获得预测的输出。然后,确定损失,我们将计算rpn损失和快速r-cnn损失。
Proposal targets
Fast R-CNN网络将region proposals(通过之前章节的proposal层中获取),ground-truth 边界框及其对应的标签作为输入,采用如下参数:
n_sample:roi中采样的样本数目,默认为128.
pos_ratio:n_samples中的正样本的比例,默认为0.25.
pos_iou_thresh:设置为正样本region proposal与ground-truth目标之间最小的重叠值阈值。
[neg_iou_threshold_lo, neg_iou_threshold_hi] : [0.0, 0.5], 设置为负样本[背景]的重叠值阈值。
n_sample = 128
pos_ratio = 0.25
pos_iou_thresh = 0.5
neg_iou_thresh_hi = 0.5
neg_iou_thresh_lo = 0.0
采用这些参数,我们看一下如何设定proposal目标。首先编写sudo代码:
- For each roi, find the IoU with all other ground truth object [N, n]
- where N is the number of region proposal boxes
- n is the number of ground truth boxes
- Find which ground truth object has highest iou with the roi [N], these are the labels for each and every region proposal
- If the highest IoU is greater than pos_iou_thesh[0.5], then we assign the label.
- pos_samples:
- We randomly samply [n_sample x pos_ratio] region proposals and consider these only as positive labels
- If the IoU is between [0.1, 0.5], we assign a negitive label[0] to the region proposal
- neg_samples:
- We randomly sample [128- number of pos region proposals on this image] and assign 0 to these region proposals
- We collect the pos_samples and neg_samples and remove all other region proposals
- convert the locations of groundtruth objects for each region proposal to the required format (Described in Fast R-CNN)
- Ouput labels and locations for the sampled_rois
现在一直如何用Python实现。
找到每个ground-truth 目标与region proposal的iou,采用anchor boxes中相同的代码计算ious:
ious = np.empty((len(roi), 2), dtype=np.float32)
ious.fill(0)
for num1, i in enumerate(roi):
ya1, xa1, ya2, xa2 = i
anchor_area = (ya2 - ya1) * (xa2 - xa1)
for num2, j in enumerate(bbox):
yb1, xb1, yb2, xb2 = j
box_area = (yb2- yb1) * (xb2 - xb1)
inter_x1 = max([xb1, xa1])
inter_y1 = max([yb1, ya1])
inter_x2 = min([xb2, xa2])
inter_y2 = min([yb2, ya2])
if (inter_x1 < inter_x2) and (inter_y1 < inter_y2):
iter_area = (inter_y2 - inter_y1) * \
(inter_x2 - inter_x1)
iou = iter_area / (anchor_area+ \
box_area - iter_area)
else:
iou = 0.
ious[num1, num2] = iou
print(ious.shape)
#Out:
#[1535, 2]
找到与每个region proposal具有较高IoU的ground truth,并且找到最大的IoU:
gt_assignment = iou.argmax(axis=1)
max_iou = iou.max(axis=1)
print(gt_assignment)
print(max_iou)
#Out:
# [0, 0, 0 ... 1, 1, 0]
# [0.016, 0., 0. ... 0.08034518, 0.10739268, 0.]
为每个proposal分配标签:
gt_roi_label = labels[gt_assignment]
print(gt_roi_label)
#Out:
#[6, 6, 6, ..., 8, 8, 6]
注意:若未将背景标记为0,则所有的标签+1。
根据每个pos_iou_thresh选择前景rois。希望只保留n_sample*pos_ratio(128*0.25=32)个前景样本,因此如果只得到少于32个正样本,保持原状。如果得到多余32个前景目标,从中采样32个样本。通过如下代码实现:
pos_index = np.where(max_iou >= pos_iou_thresh)[0]
pos_roi_per_this_image = int(min(pos_roi_per_image, pos_index.size))
if pos_index.size > 0:
pos_index = np.random.choice(
pos_index, size=pos_roi_per_this_image, replace=False)
print(pos_roi_per_this_image)
print(pos_index)
#Out
# 18
# [ 257 296 317 1075 1077 1169 1213 1258 1322 1325 1351 1378 1380 1425
# 1472 1482 1489 1495]
针对负[背景]region proposal进行相似处理,如果对于之前分配的ground truth目标,region proposal的IoU在neg_iou_thresh_lo和neg_iou_thresh_hi之间,对该region proposal分配0标签,从这些负样本中采样n(n_sample-pos_samples,128-32=96)个region proposals。
neg_index = np.where((max_iou < neg_iou_thresh_hi) &
(max_iou >= neg_iou_thresh_lo))[0]
neg_roi_per_this_image = n_sample - pos_roi_per_this_image
neg_roi_per_this_image = int(min(neg_roi_per_this_image,
neg_index.size))
if neg_index.size > 0 :
neg_index = np.random.choice(
neg_index, size=neg_roi_per_this_image, replace=False)
print(neg_roi_per_this_image)
print(neg_index)
#Out:
#110
# [ 79 688 160 ... 376 712 1235 148 1001]
现在我们整合正样本索引和负样本索引,及他们各自的标签和region proposals:
keep_index = np.append(pos_index, neg_index)
gt_roi_labels = gt_roi_label[keep_index]
gt_roi_labels[pos_roi_per_this_image:] = 0 # negative labels --> 0
sample_roi = roi[keep_index]
print(sample_roi.shape)
#Out:
#(128, 4)
对这些sample_roi选择ground truth目标之后按照第二节中为anchor boxes分配位置的方式进行参数化:
bbox_for_sampled_roi = bbox[gt_assignment[keep_index]]
print(bbox_for_sampled_roi.shape)
#Out
#(128, 4)
height = sample_roi[:, 2] - sample_roi[:, 0]
width = sample_roi[:, 3] - sample_roi[:, 1]
ctr_y = sample_roi[:, 0] + 0.5 * height
ctr_x = sample_roi[:, 1] + 0.5 * width
base_height = bbox_for_sampled_roi[:, 2] - bbox_for_sampled_roi[:, 0]
base_width = bbox_for_sampled_roi[:, 3] - bbox_for_sampled_roi[:, 1]
base_ctr_y = bbox_for_sampled_roi[:, 0] + 0.5 * base_height
base_ctr_x = bbox_for_sampled_roi[:, 1] + 0.5 * base_width
之后用如下公式:
t_{x} = (x - x_{a})/w_{a}
t_{y} = (y - y_{a})/h_{a}
t_{w} = log(w/ w_a)
t_{h} = log(h/ h_a)
eps = np.finfo(height.dtype).eps
height = np.maximum(height, eps)
width = np.maximum(width, eps)
dy = (base_ctr_y - ctr_y) / height
dx = (base_ctr_x - ctr_x) / width
dh = np.log(base_height / height)
dw = np.log(base_width / width)
gt_roi_locs = np.vstack((dy, dx, dh, dw)).transpose()
print(gt_roi_locs)
#Out:
# [[-0.08075945, -0.14638858, -0.23822695, -0.23150307],
# [ 0.04865225, 0.15570255, 0.08902431, -0.5969549 ],
# [ 0.17411101, 0.2244332 , 0.19870323, 0.25063717],
# .....
# [-0.13976236, 0.121031 , 0.03863466, 0.09662855],
# [-0.59361845, -2.5121436 , 0.04558792, 0.9731178 ],
# [ 0.1041566 , -0.7840459 , 1.4283055 , 0.95092565]]
因此可以得到采样的roi的gi_roi_cls和gt_roi_labels,现在需要设计fast r-cnn网络,预测locs和标签,将在下一节实现。
Fast R-CNN
Fast R-CNN 使用 ROI pooling来提取特性,每一个proposal由选择搜索 (Fast RCNN) 或者 Region Proposal network (Faster R- CNN中RPN)来建议得出. 我们将会看到 ROI pooling 如何工作和我们在第4节为这层计算的rpn proposals。 稍后我们将看到这一层是如何联系到 classification 和 regression层来分别计算类概率和边界领域的坐标。
兴趣池地区(也作为RoI pooling) 目的是执行从不均匀大小到 固定大小的特征地图(feature maps) (例如 7×7)的输入的最大范围池。这一层有两个输入:
一个从有几个卷积和最大池(max-pooling)层的深度卷积网络获得的固定大小的特征地图(feature map)
一个 Nx5 矩阵代表一列兴趣区域(regions of interest),N 表示RoIs的个数. 第一列表示影像的索引,剩下的四个是范围的上左和下右的坐标。
RoI做了什么呢? 对于每一个输入列表的兴趣区域,选取了输入特征地图的一部分与之相对应,按预定大小 (如7×7)来测量. 测量如下:
划分 region proposal到等大小的部分(数值和输出的维度一样)
找到每个部分中的最大值
复制这些最大值到输出缓冲区
结果来自于一列不同大小的长方形,我们可以快速的得到一列相应的固定规格的特征地图(feature maps). 注意到 RoI pooling 的输出规格实际上并不依赖于feature maps的输入规格,也不依赖于region proposals的规格。它只取决于我们划分proposal到的区域的数值。RoI pooling的好处在哪里呢? 一个是处理速度。如果这里有多个object proposals在框架中(通常会有多个), 我们依然可以对它们全部使用相同的输入feature map。因此在进程的早期计算卷积的代价是很高的,这个方法可以省去我们很多的时间。下面的图表展示了ROI pooling如何工作的。
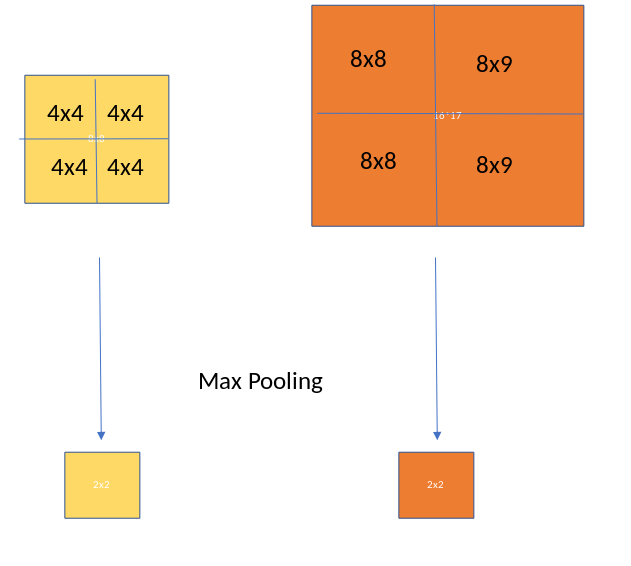
ROI Pooling 2x2
从前面的部分我们可以得到 gt_roi_locs, gt_roi_labels 和 sample_rois. 我们将会使用 sample_rois 作为 roi_pooling层的输入. 注意 sample_rois的规格是 [N, 4] ,每行的格式是 yxhw [y, x, h, w]. 我们需要对这书组做两个改变:
添加图像的索引[这里我们只有一个图像]
将格式改为xywh
因为sample_rois是一个 numpy数组,我们将会转换为Pytorch张量. 创建roi_indices 张量:
rois = torch.from_numpy(sample_rois).float()
roi_indices = 0 * np.ones((len(rois),), dtype=np.int32)
roi_indices = torch.from_numpy(roi_indices).float()
print(rois.shape, roi_indices.shape)
#Out:
#torch.Size([128, 4]) torch.Size([128])
合并 rois and roi_indices, 这样我们将会得到维度是[N, 5] (index, x, y, h, w)的张量:
indices_and_rois = torch.cat([roi_indices[:, None], rois], dim=1)
xy_indices_and_rois = indices_and_rois[:, [0, 2, 1, 4, 3]]
indices_and_rois = xy_indices_and_rois.contiguous()
print(xy_indices_and_rois.shape)
#Out:
#torch.Size([128, 5])
现在我们需要将数组传到roi_pooling层。我们将会简短的讨论它的作用,解释如下:
- Multiply the dimensions of rois with the sub_sampling ratio (16 in this case)
- Empty output Tensor
- Take each roi
- subset the feature map based on the roi dimension
- Apply AdaptiveMaxPool2d to this subset Tensor.
- Add the outputs to the output Tensor
- Empty output Tensor goes to the network
我们将会定义这个大小为 7 x 7和定义adaptive_max_pool:
size = (7, 7)
adaptive_max_pool = AdaptiveMaxPool2d(size[0], size[1])
output = []
rois = indices_and_rois.data.float()
rois[:, 1:].mul_(1/16.0) # Subsampling ratio
rois = rois.long()
num_rois = rois.size(0)
for i in range(num_rois):
roi = rois[i]
im_idx = roi[0]
im = out_map.narrow(0, im_idx, 1)[..., roi[2]:(roi[4]+1), roi[1]:(roi[3]+1)]
output.append(adaptive_max_pool(im))
output = torch.cat(output, 0)
print(output.size())
#Out:
# torch.Size([128, 512, 7, 7])
# Reshape the tensor so that we can pass it through the feed forward layer.
k = output.view(output.size(0), -1)
print(k.shape)
#Out:
# torch.Size([128, 25088])
现在这将会是一个classifier层的输入, 进一步将会如同下面图表所示的分出classification head 和 regression head 。 现在让我们定义网络:
roi_head_classifier = nn.Sequential(*[nn.Linear(25088, 4096),
nn.Linear(4096, 4096)])
cls_loc = nn.Linear(4096, 21 * 4) # (VOC 20 classes + 1 background. Each wil
cls_loc.weight.data.normal_(0, 0.01)
cls_loc.bias.data.zero_()
score = nn.Linear(4096, 21) # (VOC 20 classes + 1 background)
将roi-pooling的输出传到上面我们定义的网络:
k = roi_head_classifier(k)
roi_cls_loc = cls_loc(k)
roi_cls_score = score(k)
print(roi_cls_loc.shape, roi_cls_score.shape)
#Out:
# torch.Size([128, 84]), torch.Size([128, 21])
roi_cls_loc 和 roi_cls_score 是从实际边界区域得到的两个输出张量,我们将会在第8部分看到这部分内容。在第7部分,我们将会计算关于 RPN 和 Fast RCNN 网络的损失。这将会完整了Faster R-CNN的实现。
损失函数
我们有两种网络,RPN和Fast-RCNN,相对应的特征就会有两种输出(Regression头和 classification头)。对于这两种网络的损失函数如下:

Faster RCNN 损失
RPN损失

RPN损失
在这里p_{i}是预测类标签, p_{i}^*是实际类数值。t_{i} 和 t_{i}^* 是预测坐标和实际坐标。如果anchor是正的,则实况标签p_{i}^*为1,否则为0。我们将会看到如何在Pytorch中实现。
在第2部分,我们计算了Anchor box的目标值,在第3部分我们计算了RPN网络的输出值。两者的差值将会给出RPN损失。我们将会看到如何计算。
print(pred_anchor_locs.shape)
print(pred_cls_scores.shape)
print(anchor_locations.shape)
print(anchor_labels.shape)
#Out:
# torch.Size([1, 12321, 4])
# torch.Size([1, 12321, 2])
# (12321, 4)
# (12321,)
我们将会从新排列,将输入和输出排成一行:
rpn_loc = pred_anchor_locs[0]
rpn_score = pred_cls_scores[0]
gt_rpn_loc = torch.from_numpy(anchor_locations)
gt_rpn_score = torch.from_numpy(anchor_labels)
print(rpn_loc.shape, rpn_score.shape, gt_rpn_loc.shape, gt_rpn_score.shape)
#Out
# torch.Size([12321, 4]) torch.Size([12321, 2]) torch.Size([12321, 4])
pred_cls_scores 和 anchor_labels 是RPN网络的预测对象值和实际对象值。我们将会用如下的分别对于Regression and classification 的损失函数。
对与classification我们使用Cross Entropy损失:
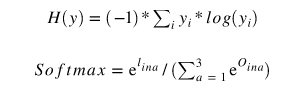
Cross Entropy 损失
使用Pytorch我们可以计算损失:
import torch.nn.functional as F
rpn_cls_loss = F.cross_entropy(rpn_score, gt_rpn_score.long(), ignore_index = -1)
print(rpn_cls_loss)
#Out:
# Variable containing:
# 0.6940
# [torch.FloatTensor of size 1]
对于 Regression 我们使用smooth L1 损失,如在Fast RCNN 论文中定义的:
Smooth L1损失
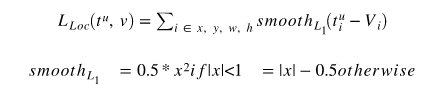
使用 L1 而不是 L2 损失,是因为RPN的预测回归头的值不是有限的。 Regression 损失也被应用在有正标签的边界区域中:
pos = gt_rpn_score > 0
mask = pos.unsqueeze(1).expand_as(rpn_loc)
print(mask.shape)
#Out:
# torch.Size(12321, 4)
现在取有正数标签的边界区域:
mask_loc_preds = rpn_loc[mask].view(-1, 4)
mask_loc_targets = gt_rpn_loc[mask].view(-1, 4)
print(mask_loc_preds.shape, mask_loc_preds.shape)
#Out:
# torch.Size([6, 4]) torch.Size([6, 4])
regression损失应用如下 :
x = torch.abs(mask_loc_targets - mask_loc_preds)
rpn_loc_loss = ((x < 1).float() * 0.5 * x**2) + ((x >= 1).float() * (x-0.5))
print(rpn_loc_loss.sum())
#Out:
# Variable containing:
# 0.3826
# [torch.FloatTensor of size 1]
合并rpn_cls_loss 和 rpn_reg_loss, 因为class loss 应用在全部的边界区域,regression loss 应用在正数标签边界区域,作者已经介绍 Λ 作为超参数。通过使用边界区域的数量:
rpn_lambda = 10.
N_reg = (gt_rpn_score >0).float().sum()
rpn_loc_loss = rpn_loc_loss.sum() / N_reg
rpn_loss = rpn_cls_loss + (rpn_lambda * rpn_loc_loss)
print(rpn_loss)
#Out:0.00248
Fast R-CNN 损失函数
快速的R-CNN损失函数也以同样的方式实现,几乎没有调整。
我们有下列的变量:
1.预测:
print(roi_cls_loc.shape)
print(roi_cls_score.shape)
#Out:
# torch.Size([128, 84])
# torch.Size([128, 21])
2.真实:
print(gt_roi_locs.shape)
print(gt_roi_labels.shape)
#Out:
#(128, 4)
#(128, )
3.转化金标准到Torch变量:
gt_roi_loc = torch.from_numpy(gt_roi_locs)
gt_roi_label = torch.from_numpy(np.float32(gt_roi_labels)).long()
print(gt_roi_loc.shape, gt_roi_label.shape)
#Out:
#torch.Size([128, 4]) torch.Size([128])
4.分类损失:
roi_clss_loss = F.cross_entropy(roi_cls_score, rt_roi_label, ignore_index=-1)
print(roi_cls_loss.shape)
#Out:
#Variable containing:
# 3.0458
# [torch.FloatTensor of size 1]
5.回归损失对于回归损失,每个ROI位置有21(num_classes+background)预测边界框。为了计算损失,我们将只使用带有正标签的边界框(P_i^*):
n_sample = roi_cls_loc.shape[0]
roi_loc = roi_cls_loc.view(n_sample, -1, 4)
print(roi_loc.shape)
#Out:
#torch.Size([128, 21, 4])
roi_loc = roi_loc[torch.arange(0, n_sample).long(), gt_roi_label]
print(roi_loc.shape)
#Out:
#torch.Size([128, 4])
用计算RPN网络回归损失的方法计算回归损失,我们得到:
roi_loc_loss = REGLoss(roi_loc, gt_roi_loc)
print(roi_loc_loss)
#Out:
#Variable containing:
# 0.1895
# [torch.FloatTensor of size 1]
注意,我们这里没有写任何regloss函数。读者可以包装在RPN Reg Loss中讨论的所有方法,并实现这个函数。
6.ROI损失总和
损失总和:
roi_lambda = 10.
roi_loss = roi_cls_loss + (roi_lambda * roi_loc_loss)
print(roi_loss)
#Out:
#Variable containing:
# 4.2353
# [torch.FloatTensor of size 1]
损失总和:
现在我们需要结合RPN损失和快速RCNN损失来计算1次迭代的总sunshi。这是一个简单的添加。
total_loss = rpn_loss + roi_loss
就是这样,我们必须在训练过程中通过一张接着一张的图像重复多次。
就是这样。更快的RCNN论文讨论了这种神经网络的不同训练方法。可参阅参考资料一节中的论文。
注意要点:
Faster RCNN是通过特征金字塔网络(FPN)进行改善的,anchor box的数量大概接近于100000,在鉴定小的对象上更精确
Faster RCNN更多的使用Resnet和ResNext这类进行训练
Faster RCNN是对于实例分割来说最先进的单一模型mask-rcnn的主干模型
参考文献
https://arxiv.org/abs/1506.01497
https://github.com/chenyuntc/simple-faster-rcnn-pytorch
作者:Prakashjay. 贡献: Suraj Amonkar, Sachin Chandra, Rajneesh Kumar 和 Vikash Challa.
多谢您的阅读,学习愉快。
想要继续查看该篇文章相关链接和参考文献?
长按链接点击打开或点击底部【阅读原文】:
https://ai.yanxishe.com/page/TextTranslation/1304
AI研习社每日更新精彩内容,观看更多精彩内容:
盘点图像分类的窍门
深度学习目标检测算法综述
生成模型:基于单张图片找到物体位置
AutoML :无人驾驶机器学习模型设计自动化
等你来译:
如何在神经NLP处理中引用语义结构
你睡着了吗?不如起来给你的睡眠分个类吧!
高级DQNs:利用深度强化学习玩吃豆人游戏
深度强化学习新趋势:谷歌如何把好奇心引入强化学习智能体

2月2日至2月12日,AI求职百题斩之每日挑战限时升级,赶紧来答题吧!
0207期 答题须知
请在公众号菜单【每日一题】→【每日一题】进入,或发送【0207】即可答题并获取解析。

点击阅读原文,查看更多内容

