【泡泡一分钟】一种基于微腔的高镜面立体光度模型(ICCV2017-332)
每天一分钟,带你读遍机器人顶级会议文章
标题:A Microfacet-based Reflectance Model for Photometric Stereo with Highly Specular Surfaces
作者:Lixiong Chen, Yinqiang Zheng, Boxin Shi, Art Subpa-Asa, Imari Sato
来源:International Conference on Computer Vision (ICCV 2017)
编译:陈世浪
审核:颜青松
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

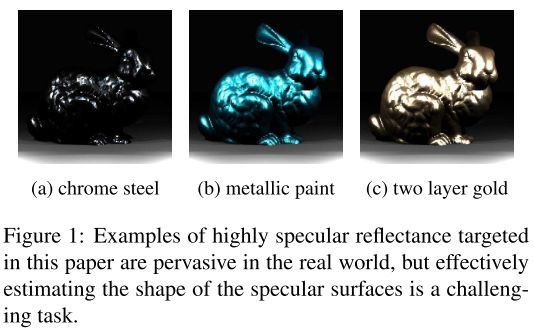
精确、稳定和可逆的表面反射率模型是实现立体视觉与现实世界匹配的关键。该领域的最新进展使各种类型的表面的形状恢复技术成为可能,但在高镜面反射率的情况下直接估计表面法线仍然难以实现。
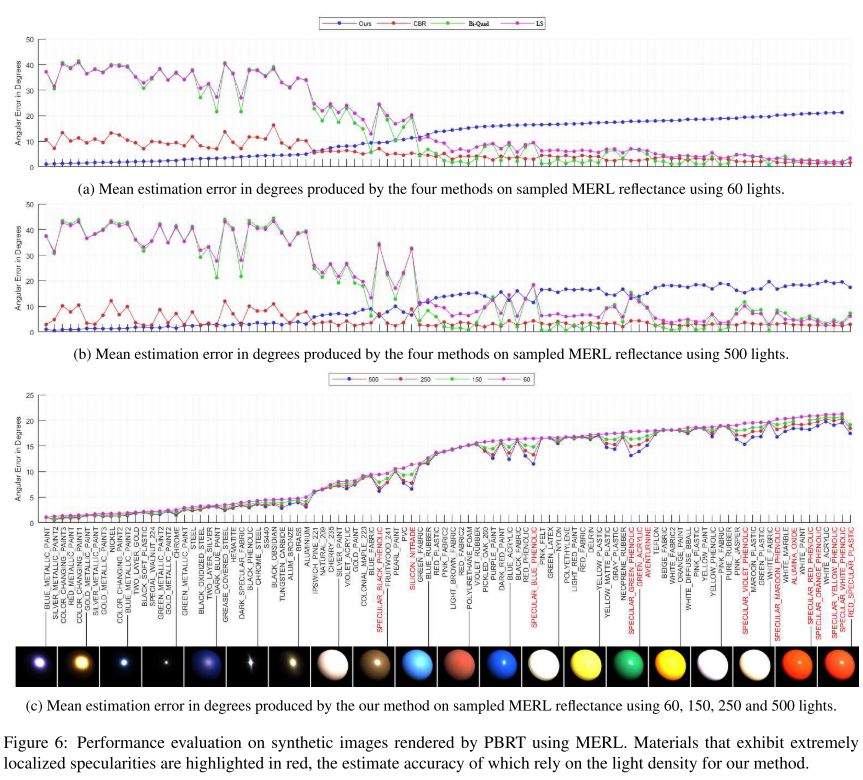
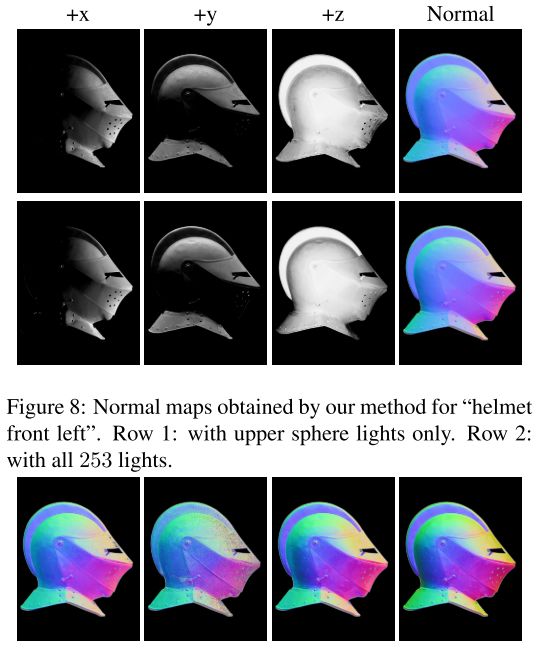
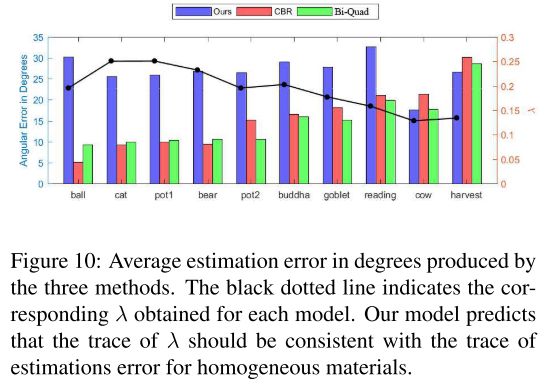
在本文中,我们推导了一个基于各向同性微腔的反射系数模型,在此基础上为高镜面曲面量身定制了一个物理可解释的近似。利用这个近似,我们确定了曲面恢复问题与椭圆拟合问题的等价性,椭圆拟合问题可以描述为多项式系统。
此外,我们设计了一个快速、非迭代和全局最优解。在仿真图像和真实图像上的实验结果都验证了我们的模型,并证明了我们的解决方案在目标应用领域能够稳定地提供优越的性能。

Abstract
A precise, stable and invertible model for surface reflectance is the key to the success of photometric stereo with real world materials. Recent developments in the field have enabled shape recovery techniques for surfaces of various types, but an effective solution to directly estimating the surface normal in the presence of highly specular reflectance remains elusive.
In this paper, we derive an ana- lytical isotropic microfacet-based reflectance model, based on which a physically interpretable approximate is tailored for highly specular surfaces. With this approximate, we identify the equivalence between the surface recovery problem and the ellipsoid ofrevolution fitting problem, where the latter can be described as a system of polynomials.
Additionally, we devise a fast, non-iterative and globally optimal solver for this problem. Experimental results on both synthetic and real images validate our model and demonstrate that our solution can stably deliver superior performance in its targeted application domain.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




