今天,CoRL 2021 公布了全部论文奖项,来自 MIT CSAIL 的研究摘得了本届 CoRL 大会的最佳论文奖,论文作者包括 Tao Chen、Jie Xu 两位华人学者;哥伦比亚大学计算机科学系 Huy Ha、Shuran Song 的研究获得了最佳系统论文奖。
![]()
北京时间 11 月 9 日,CoRL 2021 在英国伦敦和线上同时开幕。
自 2017 年首次举办以来,CoRL 已经成为了机器人学与机器学习交叉领域的全球顶级学术会议之一。CoRL 是面向机器人学习研究的 single-track 会议,涵盖机器人学、机器学习和控制等多个主题,包括理论与应用。
今天,CoRL 2021 公布了最佳论文奖、最佳系统论文奖。来自 MIT CSAIL 的研究《A System for General In-Hand Object Re-Orientation》获得 CoRL 2021 最佳论文奖,作者包括两位 MIT 博士生 Tao Chen、Jie Xu 和 MIT 电气工程与计算机科学系助理教授 Pulkit Agrawal。哥伦比亚大学计算机科学系的研究《FlingBot: The Unreasonable Effectiveness of Dynamic Manipulation for Cloth Unfoldin_g_》获得了最佳系统论文奖,作者为哥伦比亚大学计算机科学系助理教授 Shuran Song 和哥伦比亚大学计算机科学系博士生 Huy Ha。
![]()
论文标题:A System for General In-Hand Object Re-Orientation
作者:Tao Chen, Jie Xu, Pulkit Agrawal
论文链接:https://arxiv.org/abs/2111.03043
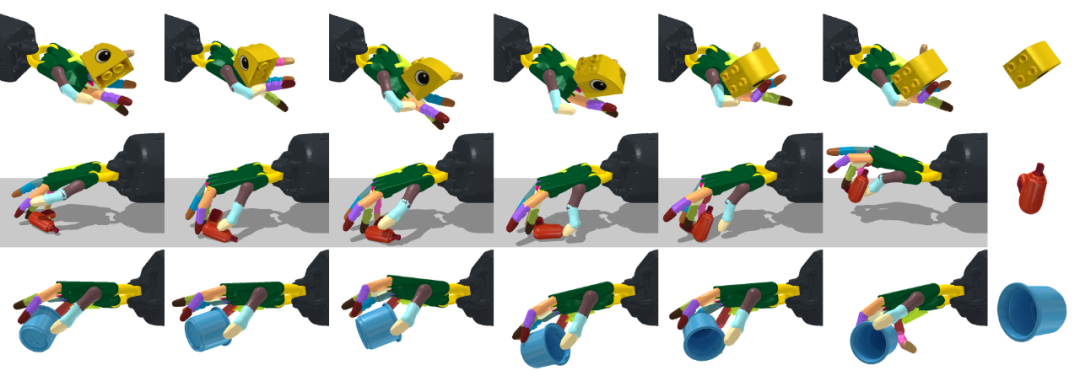
论文摘要:由于高维驱动空间以及手指与物体之间接触状态的频繁变化,手持物体的重定向一直是机器人技术中一个具有挑战性的问题。该研究提出了一个简单的无模型框架,该框架可以在机器手向上和向下的情况下学会对物体重定向。该研究展示了在这两种情况下重定向 2000 多个几何形状不同的物体的能力。学得的策略在新物体对象上显示出强大的零样本迁移性能。该研究表明可以使用在现实世界中易获得的观察结果来提炼这些策略,使其适应实际生活中的日常操作。
![]()
研究者试图寻求让机器复制人类能力的方法,他们创建了一个更大的框架:一个可以用机械手重定向 2000 多个不同物体的系统,包括手掌心朝上和朝下的情况。这种从杯子、金枪鱼罐头、Cheez-It 盒子到任何东西的操纵能力,可以帮助机械手以特定的方式和位置快速拾取和放置物体,甚至可以推广到看不见的物体。
![]()
「在工业中,平行颚爪最常用,部分原因是它的控制简单,但在物理上它无法操纵我们日常生活中看到的许多工具,」作者之一 Tao Chen 表示。「即使用钳子也很困难,因为它不能灵巧地来回移动一个手柄。我们的系统能让多指机械手灵巧地操纵这些工具,这为机器人应用开辟了一个新领域。」
虽然看似违反直觉,但单个控制器(称作机器人大脑)可以重定向很多它以前从未见过的物体,并且是在不知道形状的前提下。「我们最初认为,在机器人操纵物体时推断形状的视觉感知算法将是主要挑战,」麻省理工学院教授 Pulkit Agrawal 说。「相反,研究结果表明,人们可以学习与形状无关的强大控制策略。这表明视觉感知对于操纵可能远没有我们习惯思考的重要,更简单的感知处理策略可能就足够了。」
许多小的圆形物体(苹果、网球、弹珠)在用机械手向上和向下重定向时的成功率接近 100%,对于更复杂的物体,成功率会更低,比如勺子、螺丝刀或剪刀的成功率接近 30%。由于成功率因物体形状而异,研究者指出,未来基于对象形状的训练可以提高模型性能。
论文作者 Tao Chen2016 年本科毕业于上海交通大学,2019 年在 CMU 机器人学院获硕士学位,导师为 Abhinav Gupta。现在是 MIT CSAIL 博士生,导师 Pulkit Agrawal 也是这项研究作者之一。
![]()
此前,Tao Chen 还有多篇论文被 RSS 2021、ICRA 2021 等顶会接收。
另一位作者 Jie Xu 同样是 MIT CSAIL 博士生,导师为 Wojciech Matusik,2016 年本科毕业于清华大学计算机科学与技术系,本科期间加入清华大学计算机图形学组,在胡事民教授的指导下从事研究。
![]()
Jie Xu 有多篇论文被 NeurIPS 2021、RSS 2021、ICRA 2021 会议接收。他的研究兴趣主要集中在机器人、模拟和机器学习的交叉领域。具体包括机器人控制、强化学习、基于可微分物理的模拟、设计协同优化等。
此次会议共有四篇论文入围最佳论文奖项,除了最终得奖的论文以外,其他三篇分别是:
论文标题:Robot Reinforcement Learning on the Constraint Manifold
作者:Puze Liu, Davide Tateo, Haitham Bou Ammar, Jan Peters
论文链接:https://openreview.net/pdf?id=zwo1-MdMl1P
论文标题:Learning Off-Policy with Online Planning
作者:Harshit Sikchi, Wenxuan Zhou, David Held(CMU 机器人研究所)
论文链接:https://arxiv.org/pdf/2008.10066.pdf
论文标题:XIRL: Cross-embodiment Inverse Reinforcement Learning
作者:Kevin Zakka, Andy Zeng, Pete Florence, Jonathan Tompson, Jeannette Bohg, Debidatta Dwibedi(斯坦福大学,谷歌机器人团队,UC 伯克利)
论文链接:https://arxiv.org/pdf/2106.03911.pdf
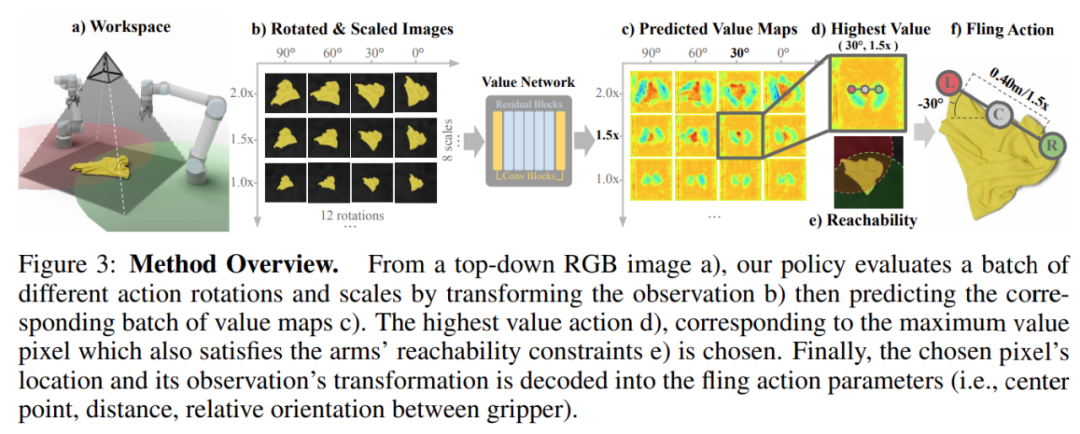
CoRL 2021 最佳系统论文奖授予了哥伦比亚大学的研究《FlingBot: The Unreasonable Effectiveness of Dynamic Manipulation for Cloth Unfoldin_g_》。
![]()
论文链接:https://openreview.net/pdf?id=0QJeE5hkyFZ
论文摘要:高速动态动作(例如投掷)通过提高运动效率并有效扩大物理触及范围,在人们与可变形物体的日常互动中发挥着至关重要的作用。先前大多数工作都使用专门的单臂准静态(quasi-static)动作来处理布料操作(例如铺床单、叠衣服),这需要大量交互来初始化布料的配置,并严格限制了机器人可操纵的最大布料尺寸。在这项工作中,研究者提出了一种自监督学习框架 FlingBot,证明了动态甩动动作对布料展开的有效性。该方法从视觉观察结果中学习了如何使用拾取、拉伸和甩动几个原型动作,使得机器人能够通过控制双臂的设置从任意初始配置展开一块织物。最终系统在新型布料上的 3 个动作内实现了超过 80% 的覆盖率,可以展开比系统覆盖范围更大的布料。尽管该研究仅在矩形布料上训练了模型,但这种方法仍然可以泛化到 T 恤,继而用于展开叠取衣物。该研究还在真实世界的双臂机器人平台上对 FlingBot 进行了微调,使得它比准静态基线增加了 4 倍以上的布料覆盖率。FlingBot 展示出超越准静态基线的卓越性能,并表明了动态动作对可变形物体操作的有效性。
![]()
该论文的作者 Huy Ha 是哥伦比亚大学计算机科学系博士生,导师 Shuran Song 是哥伦比亚大学计算机科学系助理教授。
![]()
图左:Huy Ha,图右:
Shuran Song。
Shuran Song 的研究重点是计算机视觉和机器人技术,曾获 RSS 2019 最佳系统论文奖、2020 年亚马逊研究奖、2020 年 IEEE Transactions on Robotics 最佳论文奖等。
此外,还有两篇论文入围了 CoRL 2021 的最佳系统论文奖:
SORNet: Spatial Object-Centric Representations for Sequential Manipulation
作者:Wentao Yuan, Chris Paxton, Karthik Desingh, Dieter Fox
论文链接:https://arxiv.org/pdf/2109.03891.pdf
Fast and Efficient Locomotion via Learned Gait Transitions
作者:Yuxiang Yang, Tingnan Zhang, Erwin Coumans, Jie Tan, Byron Boots
论文链接:https://arxiv.org/pdf/2104.04644.pdf
https://www.robot-learning.org/program/awards_2021
2021 博世中国 x 机器之心 AIoT 线上黑客松,20万奖金等你来赢!
10月15日至11月27日,互联交通、互联工业、碳中和、互联生活四大赛道以科技之名,看AIoT从业者有哪些新创意!
获奖创业团队 / 个人与博世中国合作;博世中国千元大礼包、机器之心2022 年度1999元Pro会员;博世中国实习机会、机器之心合作网络企业实习推荐等,更多优厚福利等你来赛!
识别下方海报二维码,立即报名。
© THE END
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com