【论文深度研读报告】MuZero算法过程详解
深度强化学习实验室
1 算法简介
1.1 背景
1.2 理解算法思想
2 模型图文讲解
2.1 MuZero中模型的组成
2.2 MuZero如何与环境进行交互并决策
2.3 MuZero如何训练模型
3 MuZero算法详解
3.1 价值网络和策略网络
3.2 MuZero中的蒙特卡洛树搜索
3.3 整体描述
3.4 步骤分解
4 总结
这篇文章的研究内容为:具有规划能力的智能体(agents with planning capabilities)。
在此之前,很多研究都是使用基于树的规划方法(Tree-based planning methods),然而在实际业务应用中,动态的控制/仿真环境,往往是复杂且未知的。
这篇文章提出了一个算法:MuZero,它通过将基于树的搜索(tree-based search)与学习模型(learned model)相结合,可以在不知道环境基本动态的情况下表现的很好。
这里的学习模型(learned model),这个模型实际上是在applied iteratively的时候,可以预测出与planning最相关的reward、action-selection policy以及value function。
因此,总结一下,MuZero的研究目的有两个:
-
一是如何在不知道状态转移规则的情况下使用蒙特卡洛树搜索算法 -
二是设计一个Model-based的算法在视觉信息丰富的环境(如Atari游戏)上表现优于Model-Free算法。
下面就开始看具体的工作了!
1 算法简介
1.1 背景
基于前瞻搜索(lookahead search)的规划算法,有很多的应用。然而这些规划算法都依赖于精确的模拟器和严谨的规则,不能直接用于现实领域。
我们知道,强化学习算法分为Model-based和Model-free。一般来说,我们的研究主要集中于Model-free的方法,即直接从与环境的交互作用中估计最优策略以及价值函数。这些方法在一些视频游戏,比如雅达利中表现的时候不错的。但是,model-free在需要精确和复杂的前瞻性(lookahead)的领域,比如围棋或国际象棋,效果就没有那么理想了。
而一般的Model-based的强化学习方法,Model实际上是一个概率分布,是构建真实的environment,或者是full observation。先从环境的dynamics中学出一个model,然后根据所学的model进行规划。但是在雅达利游戏实验中,表现的不如Model-based。
本篇文章,就是介绍了一种新的Model-based的强化学习方法MuZero,既能够在视觉复杂的雅达利上表现的很好,又能在精确规划任务中也表现的很好,
MuZero算法基于AlphaZero强大的搜索(powerful search)以及基于搜索的策略迭代(search-based policy)算法,并在训练过程中加入了一个学习模型(learned model)。
除此之外,MuZero还将AlphaZero扩展到更广泛的环境集,包括单智能体域(single agent domains)和中间时间步长(intermediate time-steps)的非零奖励(non-zero rewards)。
小总结:
Planning(规划算法)是一个比较难的研究点,我们熟知的AlphaGo是基于树的规划算法,但是这类算法需要一个完美的环境模型,这个条件在真实的世界中是很难被满足的。
DeepMind的MuZero算法是model-based RL的里程碑式成果,是推动强化学习解决真实世界中的问题的新一步进展。
1.2 理解算法思想
首先,我们开宗明义地介绍一下MuZero算法的思想:
MuZero算法的主要思想,是构造一个抽象的MDP模型,在这个MDP模型上,去预测与Planning直接相关的未来数据(策略、价值函数以及奖励),并在此基础上预测数据进行规划。
那么为什么要这样做,以及这样做为什么是有效的呢?下面就把论文中的内容“掰开”“揉碎”,理解算法的思想:
1.2.1 为什么要抽象
我们知道,大多数Model-Based强化学习方法,都是学出一个与真实环境所对应的Dynamics Model。
然而,如果是为了做Planning,我们并不关心这个Dynamics Model是否准确地还原了真实环境。
我们只要这个Dynamics Model所给出的未来每一步的value和reward都接近真实环境中的值,那么就能作为Planning中的模拟器来使用。
MuZero算法,就是先将真实环境中获取的状态,通过一个编码器(representation function)转换成一个没有直接约束的抽象的状态空间(abstract state space)中的一个隐藏状态(hidden state,通过前一个隐藏状态和假设的下一个动作进行循环迭代)。
然后在这个抽象的状态空间中,去学习Dynamics Model和value prediction,对每一个隐藏状态上的策略都进行预测(这就是与
然后,使用蒙特卡洛树搜索,将Dynamics Model当作模拟器,在抽象的状态空间中做Planning,预测接下来若干步的策略、价值函数以及奖励。
这里的隐藏状态,并不是要拟合真实环境。而是令在抽象状态空间中训练的Dynamics Model以及价值预测网络,可以在初始的隐藏状态以及执行未来k步后,对未来k步的value和reward的预测,与真实环境中通过搜索的value以及观察到的reward尽可能的相近。
简单讲,就是在虚拟状态空间中先学出一个环境模型,然后再基于这个所学到的环境模型,在无法与真实环境交互过多的情况下进行规划。
1.2.2 为什么有效
那么我们如何保证抽象MDP中的planning与真实环境中的planning等价呢?
这种等价是通过确保**价值等价(value equivalence)**来实现的。
即从相同的真实状态开始,通过抽象MDP的轨迹的累积报酬与真实环境中轨迹的累积报酬相匹配。
2 模型图文讲解
首先,总体数据一下模型的数学表达:
给定一个隐藏状态 和一个候选动作 ,动态模型 需要产生一个即时奖励 和一个新的隐藏状态 。策略 和值函数 由预测函数 通过输入 计算得到 。动作 从搜索策略 中采样得到。环境接收到一个动作生成一个新的观测 和奖励 。
下面,通过图文结合的方式,具体说一下如何通过learned model进行Planning、acting、以及training。
2.1 MuZero中模型的组成
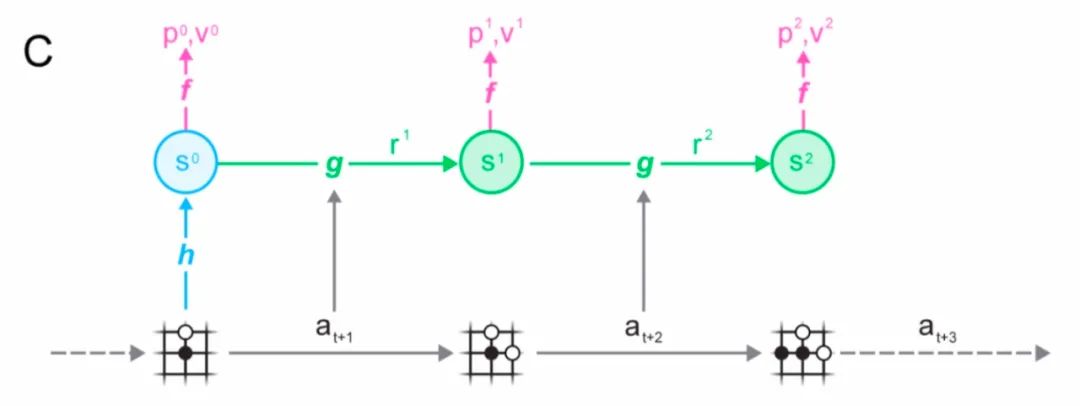
MuZero是如何使用模型进行规划的呢?我们来看A图:
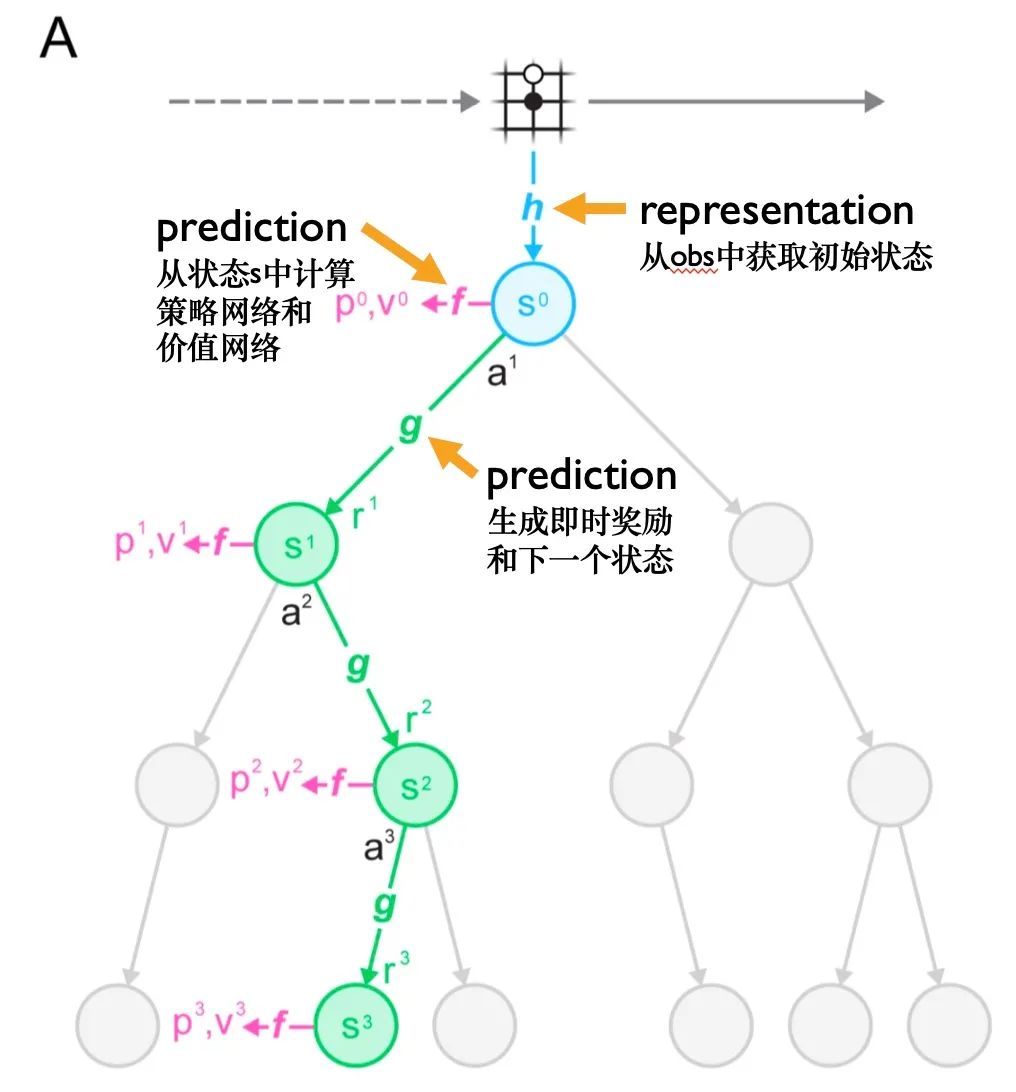
所谓的模型,由以下3个相互连接的部分组成:
-
representation:表征编码器 ,从历史观测,转换为初始状态。在上面的树型模型中,将连续的t帧观测 传给
representation函数中获得初始隐藏状态 。 -
dynamics:生成器 ,表示系统中的动态变化。给定前一个隐藏状态(previous hidden state) 和一个候选操作 ,
dynamics函数就会产生一个即时奖励(immediate reward) 和一个新的隐藏状态 。 -
prediction:预测器 。策略 以及价值函数 是通过
prediction函数从隐藏状态 中计算出来的。
2.2 MuZero如何与环境进行交互并决策
图A中所描述的是:在每一个step中,隐藏状态执行一次蒙特卡洛树搜索的到下一个动作。
那么MuZero如何在环境中进行决策呢?
下图是横向的看每一步棋的态势:
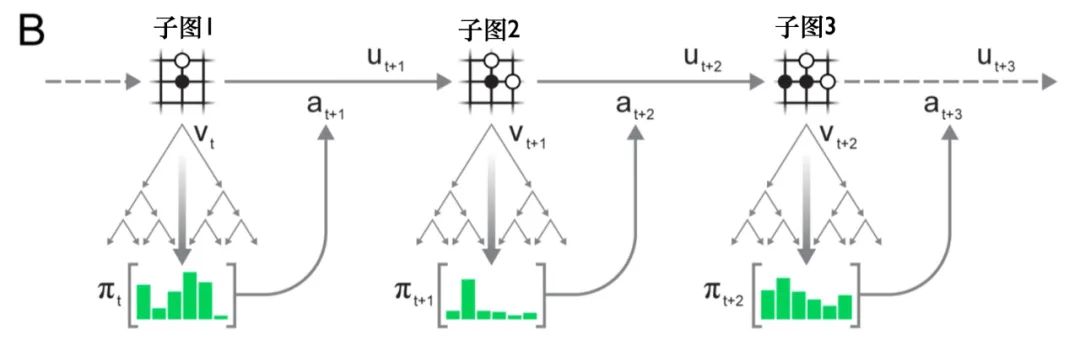
对于子图1(一黑一白)中所描述的态势而言,使用蒙特卡洛树搜索对其进行建模,得到一个策略网络 ,并针对策略网络进行采样,选出可执行动作 ,这个动作,是与MCTS根结点的每个操作的访问计数成正比的。
在执行动作 之后,得到奖励 ,得到下一时刻的观测(子图2),同样的使用MCTS进行建模,得到策略网络 ,并选出可执行动作 。
环境接受了行动,产生了一个新的观察 和回报 ,得到子图3。
就这样不断往下推演,在episode结束时,轨迹数据被存储到回放缓冲区(replay buffer)中。这就得到了一个决策。
2.3 MuZero如何训练模型
那么MuZero是如何训练模型的呢?我们看下图的过程:
对Replay Buffer中的轨迹数据进行采样,选取一个序列,然后根据该轨迹运行MuZero模型。
在初始的step中,编码器representation function
接受来自所选轨迹(the selected trajectory)的过去观测值
。
随后,模型展开K步循环。
在第k个步骤中,生成器dynamics function
接收上一步的隐藏状态
和真实的动作
。
编码器representation function、生成器dynamics function以及预测器prediction function的参数,通过**时间回溯(backpropagation-through-time)**进行端到端的联合训练(jointly trained),则可以预测三个量:
-
策略网络: -
价值网络: -
即时奖励:
其中 是一个采样的返回(a sample return),比如棋类游戏中的最终奖励,或者Atari中n步的奖励。
3 MuZero算法详解
3.1 价值网络和策略网络
MuZero是一种机器学习算法,因此自然要先了解它是如何使用神经网络的。
简单来说,该算法使用了AlphaGo和AlphaZero的策略网络和值网络:
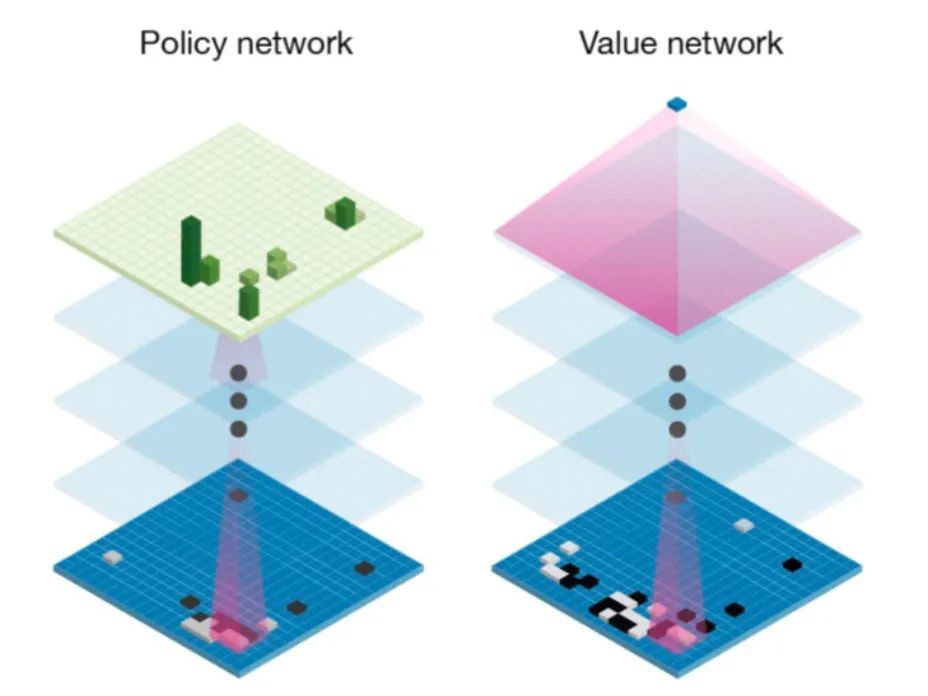
策略网络和价值网络的直观含义如下:
-
策略 表示在状态 时所有可能的动作 分布,据此可以估计最优的动作。比如,在下棋的时候,玩家会想我当前可能会如何走,对手如何走,我怎么走是最优的。 -
价值 是对当前状态 下获胜的可能性的评估,即通过对所有的未来可能性进行加权平均,确定当前局势的获胜概率。
根据策略网络,能够预测每一步的动作;依赖价值网络,可以选择价值最高的动作。将这两个估计结合起来可以得到更好的结果。
3.2 MuZero中的蒙特卡洛树搜索
3.2.1 简单介绍MCTS
MuZero也是使用MCTS(蒙特卡洛树搜索)来汇总神经网络,来在当前环境中,去预测并选择下一步动作的。当到达结束后,树中的每一个节点都会存储一些相关参数,包括被访问的次数,轮次,上一步动作的概率,子节点以及是否有所对应的隐藏状态和奖励。
蒙特卡洛树搜索,是一个迭代的,最佳优先(best-first)树搜索过程。其目标是帮我们计算出到底应该采用什么样的动作,可以实现长期受益最大化。
最佳优先,意味着搜索树的扩展(expansion)是依赖于搜索树中的价值评估(value estimates)。
与常见的深度优先、广度优先相比,最佳优先搜索,可以利用深度神经网络这种启发式估计,在非常大的搜索空间中寻找最优的解决方案。
蒙特卡洛树搜索具有四个主要阶段:
-
模拟 -
选择 -
扩展 -
回溯
通过重复执行这些阶段,MCTS每次都会在一个节点的在未来可能的动作序列(action sequences)上逐步构建一棵搜索树。在这个树中,每一个节点都表示一个未来状态,而节点之间的连线则表示从一个状态到下一个状态的动作。
3.22 MuZero算法中MCTS的四个阶段
下面我们对应MuZero算法中的蒙特卡洛树搜索,看看以上四个阶段对应的是什么内容:
首先来看模拟。
模拟的过程类似蒙特卡洛方法,快速推演。为了得到某一个状态的初始评分,让游戏随机进行直到结束,记录模拟次数以及胜利次数。
接下来是选择。
虽然Muzero不知道游戏规则,但是它知道哪一步是可以走的。在每个节点(状态s),使用评分函数 比较不同的动作 ,并选择评分最高的最优动作。
这里简单介绍一下UCB(Upper Conference Bound)策略,这是一种动作选择策略,主要用来解决 -greedy在选择时的低效率问题。举个例子, -greedy策略可以找到最好吃的那家餐厅,UCB则可以选出最喜欢吃的三家餐厅,并粗略的排个序。UCB的坏处是当数据量较小时,这个排序并非是与真实期望情况严格相符的排序,只是估计而已。也就是说UCB长于exploration,短于exploitation。UCB公式如下:
其中, 是该节点赢的次数, 是该节点模拟的次数, 是常数。通过UCB公式,随着访问次数的增加,加号后面的值越来越小,因此我们的选择会更加倾向于选择那些还没怎么被统计过的节点,避免了我们刚刚说的蒙特卡洛树搜索会碰到的陷阱——一开始走了歪路。
回到MCTS问题上来。
每次模拟从 开始,终止于叶子结点 。对于模拟的每个step ,根据内部状态 最大化置信区间上界(UCB)选择最佳动作:
每选择一个动作,我们都会增加其相关的访问计数N(s,a),以用于UCB比例因子c以及之后的动作选择。
模拟沿着树向下进行,直到尚未扩展的叶子。此时,应用神经网络评估节点,并将评估结果(优先级和值估计)存储在节点中。
然后是扩展。
在选择了一个动作A之后,在搜索树中生成一个新的节点,对应上一个状态在执行完动作A之后的局面。
最后是回溯。
在模拟结束后,从子节点开始,沿着刚刚向下的路径往回走,沿途更新各个父节点的统计信息。每个节点都在其下保存所有值估计的连续均值,这使得UCB公式可以随着时间的推移做出越来越准确的决策,从而确保MCTS收敛到最优动作。
3.2.3 中间奖励
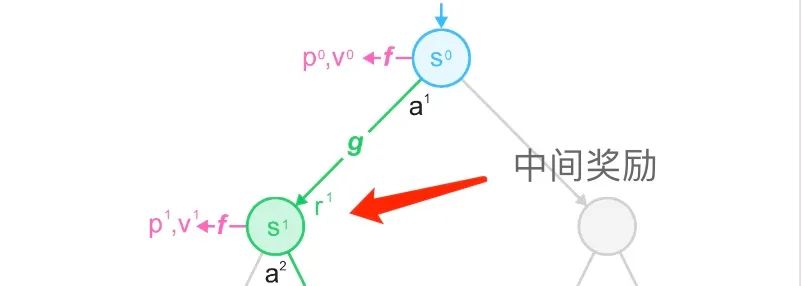
实际上,在MCTS的过程中,还包括对中间奖励r的预测。
在某些情况下,游戏完全结束后需要提供胜负反馈,这就就可以通过价值估计进行建模。但是在存在频繁反馈的情况下,每一次从一种状态转换到另一种状态后,都会得到回报r。
因此通过神经网络预测直接对reward进行建模,并将其用于搜索。在UCB策略中引入中间奖励:
其中, 是指在状态s时执行动作a后观察到的奖励,而折扣因子 是指对未来奖励的关注程度。
由于在一些环境中,奖励是无界的,因此可以将奖励以及价值估计标准化到[0,1]期间,然后再与先验知识相结合:
其中, 和 分别是整个搜索树中观察到的最大和最小 估计。
3.3 整体描述
基于过去的观测值 以及未来的行为 ,对于给定的 步中的每一个step,通过一个带有参数 的模型 ,在每个时间步 进行预测。
模型预测了3个量:
-
策略网络: -
价值函数: -
即时奖励:
其中 是真实地观测奖励, 是策略, 是折扣因子。
说白了就是拿到过去的观测数据,编码到当前的隐藏状态,然后再给定未来的动作,就可以在隐藏状态空间中进行规划了。
3.4 步骤分解
在每一个step中,模型由representation function、dynamics function以及prediction function组成:
-
dynamics function是生成器,其数学表示为: 。它的反应了真实的MDP模型的结构,输出即时奖励以及状态的转换。其中,状态 ,实际上只是隐藏状态,并没有拟合真实的环境模型,其目的是预测相关的未来的policy、values以及reward。并且在论文中 只是一个确定的函数,没有像其他强化学习方法加入随机性(后续工作可能会加入) -
prediction function类似于AlphaZero联合策略和价值的神经网络,可以从隐藏状态 计算policy和value function: 。 -
representation function,对初始化根节点状态 进行编码: 。
通过这样的模型,就可以基于过去的观察 ,在虚拟的未来轨迹 上进行搜索。
例如,可以简单地选择k步动作序列进行搜索,使值函数最大化。
也可以使用类似于AlphaZero搜索的MCTS算法,得到策略 和估计价值 ,之后就可以从策略 中选择动作 。进一步的,执行该动作并生成中间奖励和状态空间。
在第k个step中,通过对模型的所有参数进行联合训练,使policy、value、reward与实际观察到的目标值像匹配。
对模型的所有参数进行联合训练,使每个假设步骤k的策略、价值和奖励与k个实际时间步骤过后观察到的相应目标值精确匹配。
通过MCTS,可以得到三个改进的策略目标(improved policy targets):
-
目标一:与AlphaZero类似,改进的策略目标是通过MCTS搜索生成的;第一个目标是最小化预测策略 和MCTS得到的搜索策略 之间的误差: 。
-
目标二:在MuZero算法中,value的计算与AlphaZero中MCTS使用完整序列平均动作价值不同。MuZero中MCTS使用带衰减因子和中间奖励的长episode更新value,相当于使用了TD(n),速度更快、方差更小。公式为:。其中 表示观测奖励、 表示累计价值。之后就可以最小化预测价值 和MCTS得到的 之间的误差:
-
目标三:最小化预测奖励 和观察到的奖励 之间的误差:
最后,添加L2正则化项,得到最终的损失函数:
4 总结
强化学习分为Model-based和Model-free两大类。
其中,Model-based强化学习方法需要构造环境模型。一般来说,环境模型是由马尔可夫决策过程(MDP)表示的。该过程由两部分组成:
-
状态转换模型(state transition model),用于预测下一个状态; -
奖励模型(reward model),用于预测该转换期间的预期奖励。
模型一般是通过所选择的动作,或者临时抽象的行为进行训练。一旦建立了一个模型,就可以直接应用MDP规划算法(比如:值迭代value iteration、蒙特卡洛树搜索MCTS)来计算MDP的最优值或最优策略。
因此,在复杂环境或者部分观测的情况下,去构造模型应该预测的状态表示就很困难了。因为Agent没有办法去优化“the purpose of effective planning”的representation和model,这就导致了,representation learning、model learning以及planning之间就会出现分离。
而MuZero是一种完全不同的Model-based的强化学习方法,其重点是端到端预测值函数。主要思想是构造一个抽象的MDP模型,使抽象MDP中的规划等价于真实环境中的规划。
这种等价是通过保证价值等价来实现的,即从同一真实状态开始,通过抽象MDP的轨迹的累积报酬与真实环境中轨迹的累积报酬相匹配。
预测器 首先引入了价值等价模型(value equivalent models)在没有动作的情况下去预测value。
虽然底层的模型是MDP,但是它的转换模型不需要与环境中的真实状态相匹配,只要将MDP模型看作深度神经网络中的一个hidden layer就行。对展开的MDP进行训练,例如通过时间差分学习,使期望的累积奖励总和与实际环境的期望值相匹配。
然后,价值等价模型(value equivalent model)扩展到有行动优化价值中。TreeQN学习一个抽象的MDP模型,使得在该模型上的树搜索(由树结构的神经网络表示)逼近最优值函数。值迭代网络(value iteration networks)学习一个局部MDP模型,使得该模型上的值迭代(由卷积神经网络表示)逼近最优值函数。
价值预测网络(value prediction networks)比较接近MuZero:学习一个基于实际行动的MDP模型;展开的MDP经过训练,使得奖励的累积总和,以简单的前瞻性搜索产生的实际行动顺序为条件,与真实环境相匹配。没有策略预测,搜索只使用值预测。
通过对论文的学习,虽然理解了MuZero算法的思想,但是如果想要在实际项目中使用MuZero还是有不小的困难。
比如如何设计representation、dynamic以及prediction等等,这些都需要在对代码实现非常熟悉的情况下,再结合具体业务场景进行实现。
提供一个基于pytorch的muzero算法实现:https://github.com/werner-duvaud/muzero-general
如果有时间,还会继续研究代码,争取对论文进行复现。
完
总结3: 《强化学习导论》代码/习题答案大全
总结6: 万字总结 || 强化学习之路
完
第96篇: 值分布强化学习(Distributional RL)总结
第95篇:如何提高"强化学习算法模型"的泛化能力?
第94篇:多智能体强化学习《星际争霸II》研究
第93篇:MuZero在Atari基准上取得了新SOTA效果
第91篇:详解用TD3算法通关BipedalWalker环境
第88篇:分层强化学习(HRL)全面总结
第85篇:279页总结"基于模型的强化学习方法"
第84篇:阿里强化学习领域研究助理/实习生招聘
第83篇:180篇NIPS2020顶会强化学习论文
第81篇:《综述》多智能体强化学习算法理论研究
第80篇:强化学习《奖励函数设计》详细解读
第79篇: 诺亚方舟开源高性能强化学习库“刑天”
第77篇:深度强化学习工程师/研究员面试指南
第75篇:Distributional Soft Actor-Critic算法
第74篇:【中文公益公开课】RLChina2020
第73篇:Tensorflow2.0实现29种深度强化学习算法
第72篇:【万字长文】解决强化学习"稀疏奖励"
第71篇:【公开课】高级强化学习专题
第70篇:DeepMind发布"离线强化学习基准“
第66篇:分布式强化学习框架Acme,并行性加强
第65篇:DQN系列(3): 优先级经验回放(PER)
第64篇:UC Berkeley开源RAD来改进强化学习算法
第61篇:David Sliver 亲自讲解AlphaGo、Zero
第59篇:Agent57在所有经典Atari 游戏中吊打人类
第58篇:清华开源「天授」强化学习平台
第57篇:Google发布"强化学习"框架"SEED RL"
第53篇:TRPO/PPO提出者John Schulman谈科研
第52篇:《强化学习》可复现性和稳健性,如何解决?
第51篇:强化学习和最优控制的《十个关键点》
第50篇:微软全球深度强化学习开源项目开放申请
第49篇:DeepMind发布强化学习库 RLax
第48篇:AlphaStar过程详解笔记
第47篇:Exploration-Exploitation难题解决方法
第45篇:DQN系列(1): Double Q-learning
第44篇:科研界最全工具汇总
第42篇:深度强化学习入门到精通资料综述
第41篇:顶会征稿 || ICAPS2020: DeepRL
第40篇:实习生招聘 || 华为诺亚方舟实验室
第39篇:滴滴实习生|| 深度强化学习方向
第37篇:Call For Papers# IJCNN2020-DeepRL
第36篇:复现"深度强化学习"论文的经验之谈
第35篇:α-Rank算法之DeepMind及Huawei改进
第34篇:从Paper到Coding, DRL挑战34类游戏
第31篇:强化学习,路在何方?
第30篇:强化学习的三种范例
第29篇:框架ES-MAML:进化策略的元学习方法
第28篇:138页“策略优化”PPT--Pieter Abbeel
第27篇:迁移学习在强化学习中的应用及最新进展
第26篇:深入理解Hindsight Experience Replay
第25篇:10项【深度强化学习】赛事汇总
第24篇:DRL实验中到底需要多少个随机种子?
第23篇:142页"ICML会议"强化学习笔记
第22篇:通过深度强化学习实现通用量子控制
第21篇:《深度强化学习》面试题汇总
第20篇:《深度强化学习》招聘汇总(13家企业)
第19篇:解决反馈稀疏问题之HER原理与代码实现
第17篇:AI Paper | 几个实用工具推荐
第16篇:AI领域:如何做优秀研究并写高水平论文?