【泡泡一分钟】基于全局最优内点集最大的同步位姿计算和特征匹配算法(iccv2017-1)
每天一分钟,带你读遍机器人顶级会议文章
标题:Globally-Optimal Inlier Set Maximisation for
Simultaneous Camera Pose and Feature Correspondence
作者:Dylan Campbell, Lars Petersson,Laurent Kneip and Hongdong Li
来源:ICCV2017
播音员:amy
编译:颜青松
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

众所周知,计算单张影像相对于某一确定三维点云的位姿信息是许多计算机视觉应用中的一个核心问题。PnP算法则是针对该问题的一种常用的解决方案,然而其前提是给定三维点和图像上二维点的匹配关系。并且如何寻找正确的二维关键点和三维点的匹配关系非常复杂,尤其是在只知道位置信息而不知道姿态信息的场景下。现有的方法通常使用局部优化来解决位姿估计和匹配关系问题,这些方法通常需要一个较好的初值或者给定非常苛刻的假设条件。
考虑到存在大量的外点,本文提出了一种全局最优的内点集基数最大化方法,可以同时进行相机位姿估计优化和特征匹配。本文采取分支定界在6D空间中寻找最优的相机位姿,保证在不需要位姿先验的前提下得到全局最优。同时,本文也使用SE(3)几何来寻找内点数目的上下限,并且局部优化时也使用整数来加速迭代。
经试验证明,本文的结果是最优结果,与其他算法相比更加鲁棒,包括在大尺度室外数据集上本文的算法也是最优的。
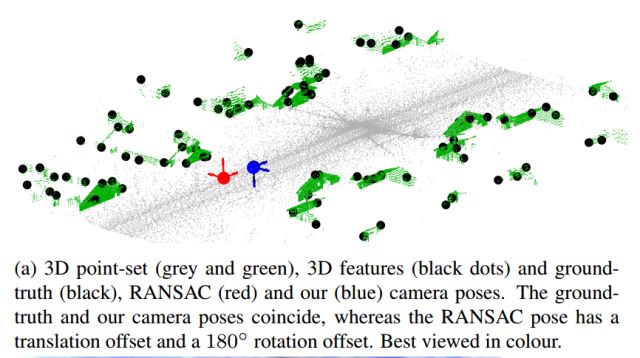
下图展示了本文算法的一个结果,其中蓝色是本文的结果,黑色是正确结果。
Abstract
Estimating the 6-DoF pose of a camera from a single image relative to a pre-computed 3D point-set is an important task for many computer vision applications. Perspective-nPoint (PnP) solvers are routinely used for camera pose estimation, provided that a good quality set of 2D–3D feature correspondences are known beforehand. However, finding optimal correspondences between 2D key-points and a 3D point-set is non-trivial, especially when only geometric (position) information is known. Existing approaches to the simultaneous pose and correspondence problem use local optimisation, and are therefore unlikely to find the optimal solution without a good pose initialisation, or introduce restrictive assumptions. Since a large proportion of outliers are common for this problem, we instead propose a globally-optimal inlier set cardinality maximisation approach which jointly estimates optimal camera pose and optimal correspondences. Our approach employs branchand-bound to search the 6D space of camera poses, guaranteeing global optimality without requiring a pose prior. The geometry of SE(3) is used to find novel upper and lower bounds for the number of inliers and local optimisation is integrated to accelerate convergence. The evaluation empirically supports the optimality proof and shows that the method performs much more robustly than existing approaches, including on a large-scale outdoor data-set.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘链接:
链接: https://pan.baidu.com/s/1dKkE6q 密码: tbcp
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



