你以为 GPS 定位无处不在,来看看 MIT 科学家如何利用无线信号使定位更准确
长按识别二维码,报名2018十大突破技术全球直播首发
随着数十亿具备 GPS 功能的电子设备的普及,人们已经习惯了电子设备上的定位服务所带来的便利。
但是 GPS 系统的室内定位效果有限,同时对于一些潜在应用场景来说,它的精准度也不理想,例如定位医院内的医疗设备或仓库内的货物栈板,以及帮助紧急救援人员在不熟悉的建筑物中导航。
航空航天学教授 Moe Win 花了十年的时间研究使用无线信号测量位置的理论和实践。2010 年,他的小组发表了一系列论文,推导根据信号功率,到达角度和飞行(传输)时间等信号特征,判断无线发射机位置系统的精准度的基本限制。

Win 教授和两位同事——MIT 航空航天学研究生戴文翰(Wenhan Dai)和清华大学电子工程系副教授沈渊(Yuan Shen),对此进行了更加深入的研究,成果刊登于 2 月份的《IEEE 信息理论汇刊》上。
首先,他们展示了改变无线定位系统的参数(如功率,带宽和传输持续时间),对其准确度的基本限制有何影响。这反过来帮助他们确定了判断位置最准确的系统配置。他们还提供了可操作的定位算法,可以在实际情况下接近这些限制。
Win 教授表示,“我们正在建立一个理论,用来确定不同约束条件下位置判断的基本限制。换句话说,对于给定的资源,我们能做的最好的选择是什么?基于这个理论,我们发明了接近这些限制的算法,然后开展实验。事实上,开始实验意味着算法必须尽可能的高效,这是我们的目标。”
几何解释
研究人员的理论方法假定,定位网络由已知位置的节点(称为“锚点”)和未知位置的节点(称为“代理”)组成。例如,办公楼内分布的 Wi-Fi 接入点可以作为锚点,试图确定相对于锚点位置的智能手机将被视为代理。
在理论框架内,为了达到的目标被研究人员称之为“节点优先级划分”,即确定哪些可用锚点应该传输哪些信号,以什么样的功率,多大的频率区间和多久的信号持续时间传输,从而实现定位准确性和系统资源消耗的平衡。如果一个定位非常准确的解决方案是建立在锚点长时间大功率广播,并且网络中没有进行其它通信的可能性的基础上,那么这将不能成为一个最优方案。
研究人员的理论分析表明,具备调整系统参数的能力可以持续降低 30%至 50%的定位误差。
新论文的关键(意义)在于选择和配置锚点的几何解释。研究人员用来评估定位准确性的度量标准取决于从无线信号中提取的位置信息的三个不同特征。因此,它定义了一个三维的数学空间,最终呈现出一个子弹形状。
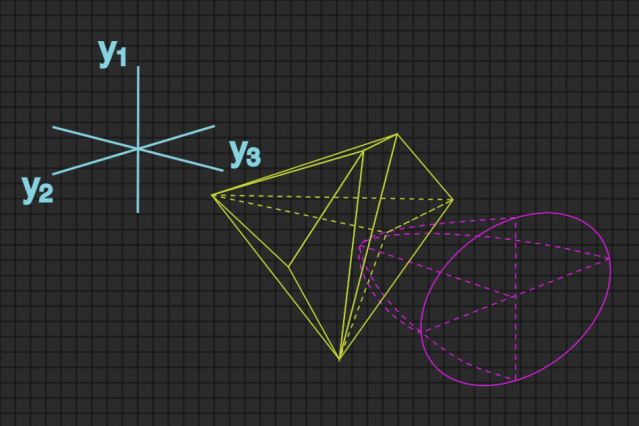
图丨黄色代表无线网络的配置,紫色代表测量误差,两者的交点是最佳的网络配置参数
网络中所有锚点的可能设置也定义了一个大得多的数学空间。如果网络中有 20 个锚点,则相对应的设置共同定义了一个 20 维的空间。然而 Win 教授和同事找到了一种将高维空间转化为三维空间的方法:用一个多面体,代表所有可能的,能够满足一定的资源限制的锚点配置。将两组数据转移到相同的三维空间中,使得计算节点优先级问题的解决方案变得更加简单快速。
整个问题变成了寻找恰好与多面体相交于一点的“子弹”——这代表着定位的误差量。相交点代表了能够提供最准确定位的网络配置。如果“子弹”和多面体完全不相交,那么我们无法测量误差。如果它们有重叠区域,那么误差测量并没有降到最低。一旦交点被发现,它可以被映射回到更高维度的空间,反映出它代表的特定的锚点设置。
足够准确
如果网络的资源限制(传输功率,带宽和传输持续时间)被视为单个累积值,则此方法特别有效。在这种情况下,找到多面体和“子弹“之间的交点是通过计算实现的。
然而在现实世界中,节点的各种限制可能需要单独考虑。在这种情况下,多面体的形状将变得更加复杂,并且寻找交点的时间也会变长。
为了解决这个问题,三名研究人员提出了一个近似算法,用于实现设备(节点)限制独立的网络配置。在论文中,他们能够证明,虽然近似算法快得多,但其结果与全面优化算法得出的结果几乎没有区别。
-End-
编辑:Ren 校审:郝锕铀
参考:
http://news.mit.edu/2018/wireless-location-detection-gps-0123





