

本标准研究了L4、L5自动驾驶车辆在车路协同系统中遇到的8个典型场景,包括:协同式感知、基于路侧协同的无信号交叉口通行、基于路侧协同的自动驾驶车辆“脱困”、高精地图版本对齐及动态更新、自主泊车、基于路侧感知的“僵尸车”识别、基于路侧感知的交通状况识别、基于协同式感知的异常驾驶行为识别。以上述场景需求为出发点,提出了相关的数据集需求。
本标准研究L4、L5高等级自动驾驶中的车路协同典型应用场景及场景对应的感知、决策、控制数据内容,重点涵盖障碍物感知、轨迹决策、通行控制、数据更新等车路协同应用,目的是依靠路侧的感知、处理能力和车路通信技术,实现车路协同的L4、L5自动驾驶,增强自动驾驶车辆感知、决策和控制能力,提升自动驾驶车辆的通行效率、安全性、环境适应性。
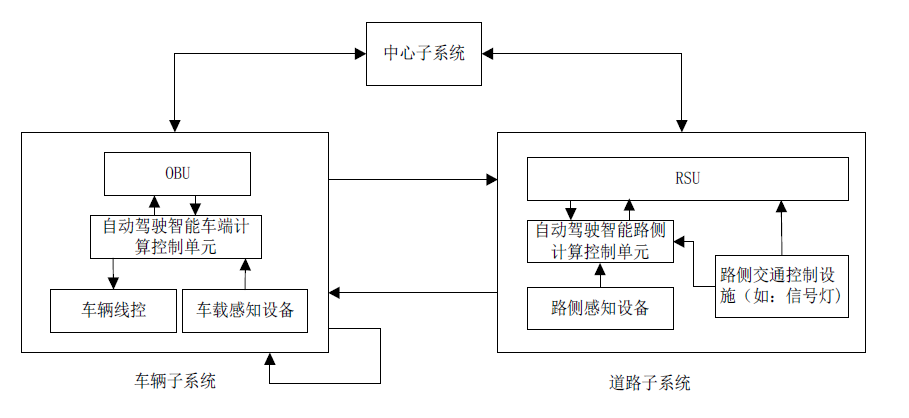
图:系统架构 本标准由中国智能网联汽车产业创新联盟(CAICV)组织提出,北京百度网讯科技有限公司牵头,联合汽车、信息通讯等30多家单位共同发起并于2019年8月在中国汽车工程学会(CSAE)正式立项,经过起草组内多次会议及意见讨论,现已完成标准征求意见稿。
成为VIP会员查看完整内容
相关内容

Arxiv
1+阅读 · 2022年4月20日
Arxiv
0+阅读 · 2022年4月19日
Arxiv
0+阅读 · 2022年4月15日
Arxiv
0+阅读 · 2022年4月15日
相关VIP内容
相关资讯
相关论文
Arxiv
1+阅读 · 2022年4月20日
Arxiv
0+阅读 · 2022年4月19日
Arxiv
0+阅读 · 2022年4月15日
Arxiv
0+阅读 · 2022年4月15日