为什么机器人技术需要更多的博弈论?
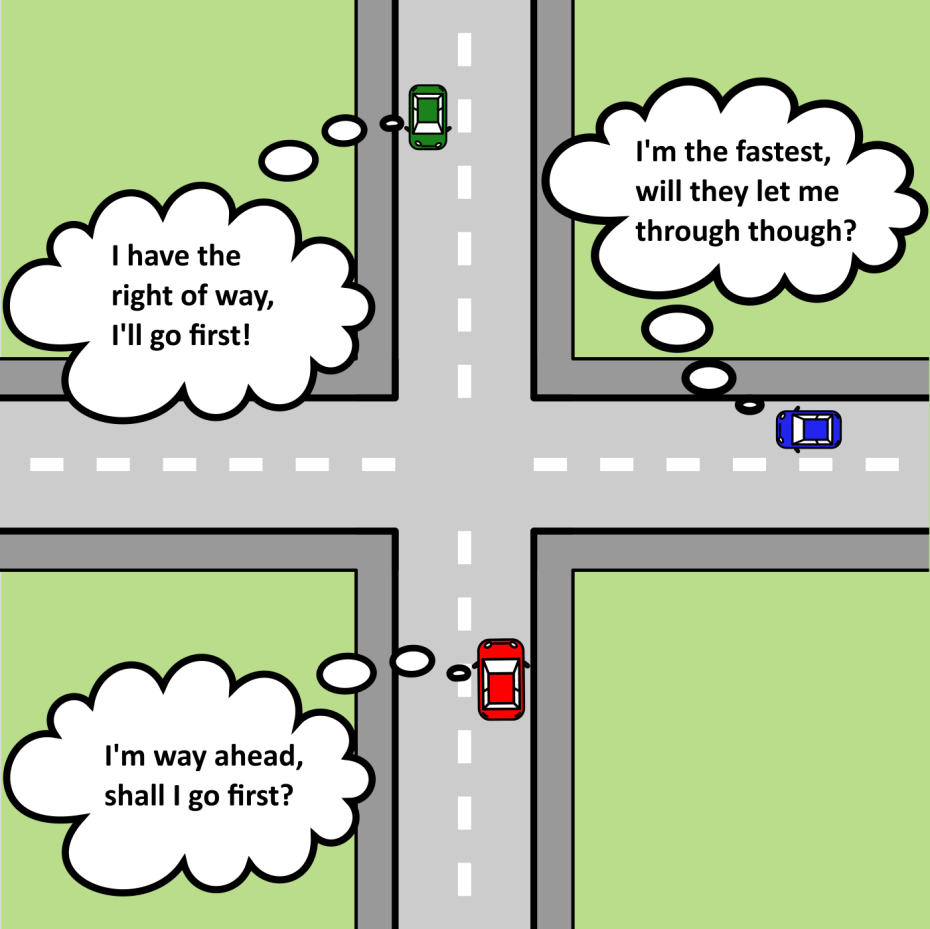
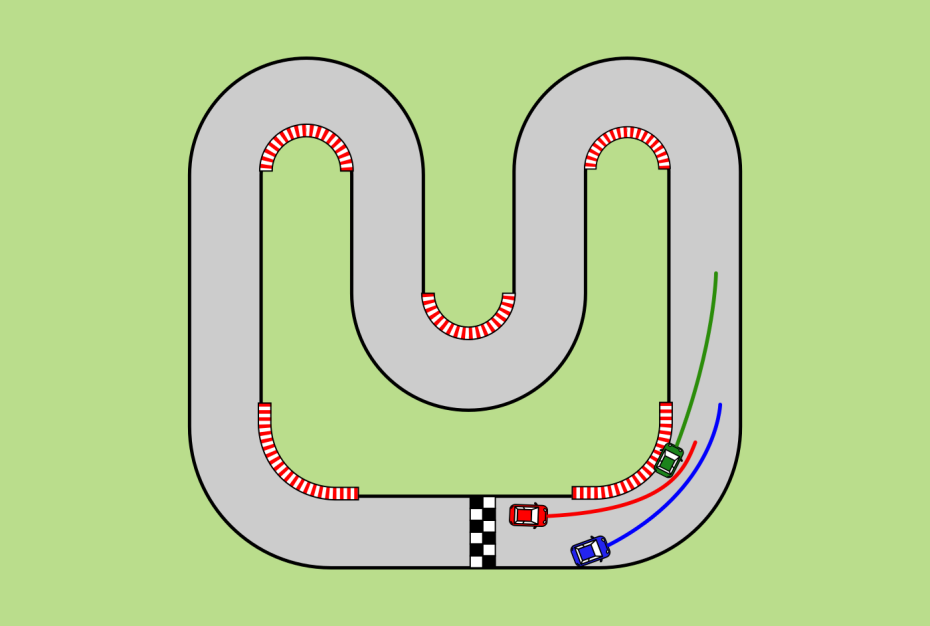
博弈论的方法既适用于竞争环境,如赛车,也适用于非竞争环境,如城市驾驶。
在我们生活的这个十年里,机器人正在离开工厂车间,进入一个更加复杂的世界,其中有异构的代理,需要一种理性和系统的交互方式。
机器人技术的创新应用(如无人机送货或自动驾驶)目前的进展突出了明确考虑其他代理和相关不确定性的决策过程的重要性。
我们相信,一个明智的未来是,自主的个体在充分意识到所面临的风险的情况下做出理性的决定。
【part 1】 Tutorial ICRA 2021——“Game Theoretical Motion Planning”(47页pdf)
1.1「 序 言 」
本手稿的范围是为有兴趣在多智能体环境中模拟运动规划问题的战略性质的读者简化初始步骤。从历史上看,博弈论一直致力于研究众多领域的理性决策:社会科学、经济学、系统科学、逻辑学、计算机科学等等。
如今,随着机器人离开工厂进入一个更复杂的世界,我们相信许多博弈论概念非常适合捕捉多智能体运动规划的动态性和互动性。它的承诺(和希望)是,明确地考虑他人的决策,赋予标准技术更丰富的描述能力。如果这一承诺是真的,我们的机器人就能更好地做出决策,从而促进我们社会的无缝融合。
1.2「 适用人群 」
一个在博弈论方面有很强背景,但在运动规划方面很少的读者,可能会发现他们一直知道的机器人应用概念的相关性。
一个具有运动规划背景但对博弈论知之甚少的读者可能会启发如何将标准技术与博弈论概念相结合,以在自己的决策中明确考虑其他人的推理。
如果运动规划和博弈论都是新的概念,我们希望能激发人们的好奇心,并激发这个话题的相关性。
1.3「 手稿结构 」
第二章以通俗易懂的语言介绍和激励运动规划任务的博弈理论概念。它提出了相应的数学模型的前向引用,这些模型出现在文档的后面和超出范围的主题中;
第三章介绍了博弈论的基本模型和一些扩展;
第五章向读者介绍了在人工智能驾驶奥运会 (AIDO) 的背景下提出的两个新的博弈论挑战。
【part 2】Introduction for the ICRA 2021 Workshop on Game-theoretical Motion Planning(video)
【part 3】Special Report (slides)
3.1「 Dr. Andrea Censi (ETH):Introduction 」(9页PPT)
3.2「Dr. Saverio Bolognani (ETH):Game-Theoretic Models of Dynamic Interaction」(53页PPT)

3.3「Dr. Alex Liniger (ETH):Noncooperative Game Theory for Autonomous Racing」(53页PPT)
3.4「Prof. Mac Schwager (Stanford):Augmented Lagrangian Methods for Online Game Theoretic Planning with Constraints」(53页PPT)

3.5「Alessandro Zanardi (ETH):Structure and Solution of Non-zero-sum Urban Driving Games」(53页PPT)