
自主系统的技术能力不断加速发展,自主系统和人员团队(TASP)也变得越来越重要,特别是在分布式海上作战(DMO)方面。计算实验为解决 DMO 研究问题提供了无与伦比但尚未开发的潜力,我们采用 POWer 计算环境对 DMO 组织和现象进行建模和模拟。首先,我们在先前研究的基础上建立了一个基准模型供比较。然后,我们调整该模型以表示 DMO,并对主要结果进行比较,以阐明与 DMO 相关的潜力和困难的重要见解。
DMO问题
2017年,美国海军作战发展司令部创造了分布式海上作战这一术语,以舰队为中心的广泛方式看待分布式兵力。其主要目标是让指挥官有更多样化的选择或传感器、平台和武器组合,同时兼顾决策和执行速度,以超越和击败对手。DMO 考虑将资源、信息和技术与组织各级的关键决策者结合起来。事实上,DMO 通过一个分布式网络来看待战争,该网络具有跨所有作战领域的所有可用平台的整合能力(Winstead 等人,2018 年)。
DMO 提出了大量开放、研究、政策和决策问题。其一,在什么情况下,人们应该从属于人工智能系统(如机器人主管)而不是控制它们(如机器人下属)?如今,很少有研究人员、政策制定者或组织领导者提出这个问题,更不用说试图回答这个问题了,因为传统的、保守的、往往是幼稚的偏见绝大多数都倾向于人控制机器。
然而,经验证据表明,在某些情况下,当人处于从属地位时,人工智能可以产生卓越的结果(例如,参见伯恩,2013 年)。这意味着革命性的变化,而我们在 C2、组织、管理、领导力、信息科学、计算机科学、人机系统整合等领域积累了数千年的知识,却在很大程度上让我们没有准备好抓住这种情景绩效优势。
另外,在什么情况下,由人员组成的单位应与由AS组成的对应单位(如单独的飞机中队)分开组织、领导和管理?由于每个任务环境都有其独特性,因此不同的任务、环境、时间和组织的答案也可能不同;甚至个人技能、团队信任度、领导特点、政治风险规避等因素也可能影响实现最大任务效率的方法。事实上,任务规划和执行的一个核心方面可能需要明确考虑如何组织人员和助理秘书长,如何实现有凝聚力的战斗员--传感器一体化,以及这种 DMO 组织甚至可能需要在任务中期进行动态重新规划和改变。
第三,研究人员、决策者和领导者如何才能建立信心,相信他们所选择的 DMO 组织方法(例如,将机器人从属于或高于人员,将 AS 和人员单位分开或合并,选择涉及人员和 AS 之间协作的任务,实现有凝聚力的战斗员-传感器一体化)将是优越的?这些由技术引发的研究问题是如此新颖和陌生,以至于可用于指导的理论微乎其微,而且要通过作战组织对无数不同的方法进行系统测试,耗时之长、成本之高、出错之多令人望而却步。当生命、肢体或自由受到威胁时,情况尤其如此。
本研究项目旨在了解如何为 DMO 实现有凝聚力的战斗员传感器集成,并模拟和概述集成实施所需的系统能力和行为类型。该项目以我们之前在有人和无人系统及传感器方面的工作为基础(例如,Nissen & Place, 2014; Place & Nissen, 2015; Nissen & Place, 2016; Nissen, 2017; Nissen & Gallup, 2019; UAS, ACTUV, MDUSV, TASP),并直接关注上述 DMO 挑战
由此引出三个主要研究问题:
问题 1:未来十年,有人驾驶和无人驾驶系统的哪些技术轨迹与 DMO 最为相关?
问题 2:什么样的 DMO 方法、组织和技术最适合利用这些技术轨迹?
问题 3: 在未来十年,需要什么样的决策、规范和培训修改来指导 DMO?
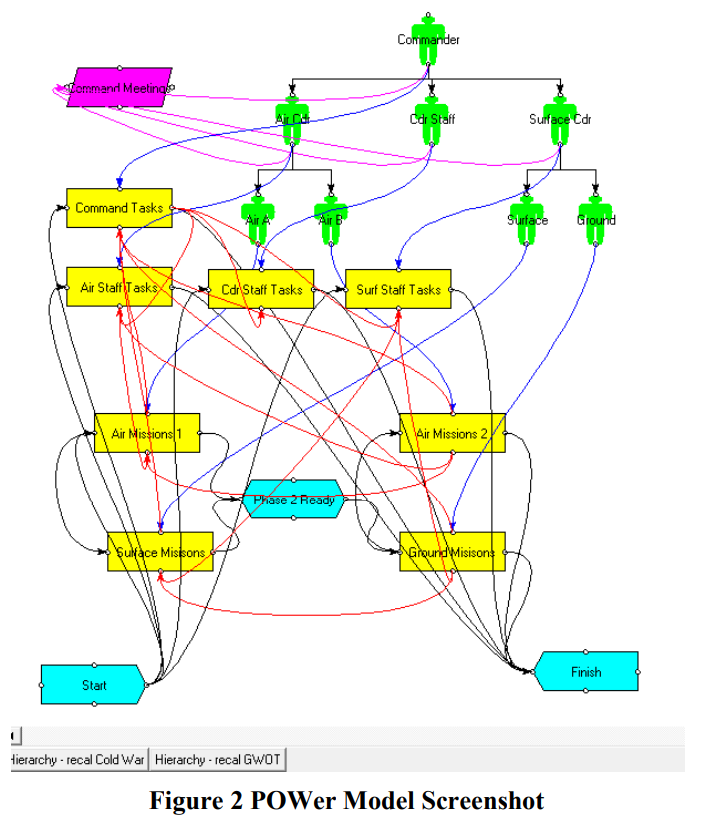
采用计算实验的方法开展这一研究项目,并为此使用了上文所述的 POWer 建模和模拟环境。与实验室或现场实验一样,计算实验也是事先设计好的,并通过精确控制和理论驱动进行操作。主要区别在于,计算实验可以完全控制变量和常量,因此具有惊人的内部有效性,而且可以无限制地精确复制。这提供了其他方法无法提供的实验能力。
另外,计算实验也无法提供与实验室实验,特别是实地实验相同的外部有效性。因此,计算实验最好被视为实验室和现场实验的补充。事实上,将研究视为实验的轨迹,可以谨慎地从计算实验开始--通过计算实验可以进行成百上千次实验,然后选择相对较少的极具前景的条件和结果进入物理实验室--物理实验室成本更高、耗时更长,但外部有效性更高。在此基础上,再将一两个特别有前景的实验带入实地--这样做的成本和时间都会更高,但外部效度会更高。有了这样一个巧妙的实验轨迹,最好的结果就可以依次融入组织中。
简而言之,利用 POWer 开发了一个代表 DMO 组织、技术和环境的计算模型,并对海上行动进行了分析,以明确该模型。我们有意分两个阶段完成这项工作,并计划将相应的研究作为一个多年期项目。
