
作为分布式海上作战(DMO)的一个关键原则,尽管有人和无人、水面和空中、作战人员和传感器在物理时空上都有分布,但它们需要整合成为一支有凝聚力的网络化兵力。本研究项目旨在了解如何为 DMO 实现有凝聚力的作战人员-传感器集成,并模拟和概述集成实施所需的系统能力和行为类型。作为一个多年期项目,本报告所述的第一项工作重点是建立一个适用于 DMO 建模、模拟和分析的计算环境,尤其侧重于有人和无人飞机的情报、监视和侦察 (ISR) 任务。
在半个世纪的建模和仿真研究与实践(例如,见 Forrester, 1961; Law & Kelton, 1991),特别是四分之一世纪的组织建模和仿真工作(例如,见 Carley & Prietula, 1994)的基础上,获得了代表当前技术水平的计算建模和仿真技术(即 VDT [虚拟设计团队];见 Levitt 等人, 1999)。这种技术利用了人们熟知的组织微观理论和通过基于代理的互动而产生的行为(例如,见 Jin & Levitt, 1996)。
通过这种技术开发的基于代理的组织模型在大约三十年的时间里也经过了数十次验证,能够忠实地反映对应的真实世界组织的结构、行为和绩效(例如,参见 Levitt, 2004)。此外,几年来,已将同样的计算建模和仿真技术应用到军事领域(例如,见 Nissen, 2007),以研究联合特遣部队、分布式作战、计算机网络行动和其他任务,这些任务反映了日益普遍的联合和联盟努力。
本报告中描述的研究项目旨在利用计算建模来了解如何为 DMO 实现有凝聚力的战斗传感器集成,并建模和概述集成实施所需的系统能力和行为类型。作为一个多年期项目,本报告所述的第一项工作重点是建立一个适用于 DMO 建模、模拟和分析的计算环境。在这第一项工作中,将对当今的海上行动进行建模、模拟和分析,重点是有人驾驶和无人驾驶飞机的情报、监视和侦察(ISR)任务。这为与执行 ISR 任务的一个或多个 DMO 组织进行比较确立了基线。这也为与其他任务(如打击、防空、水面战)进行比较建立了基线。第二阶段接着对一个或多个备用 DMO 组织进行建模、模拟和分析。
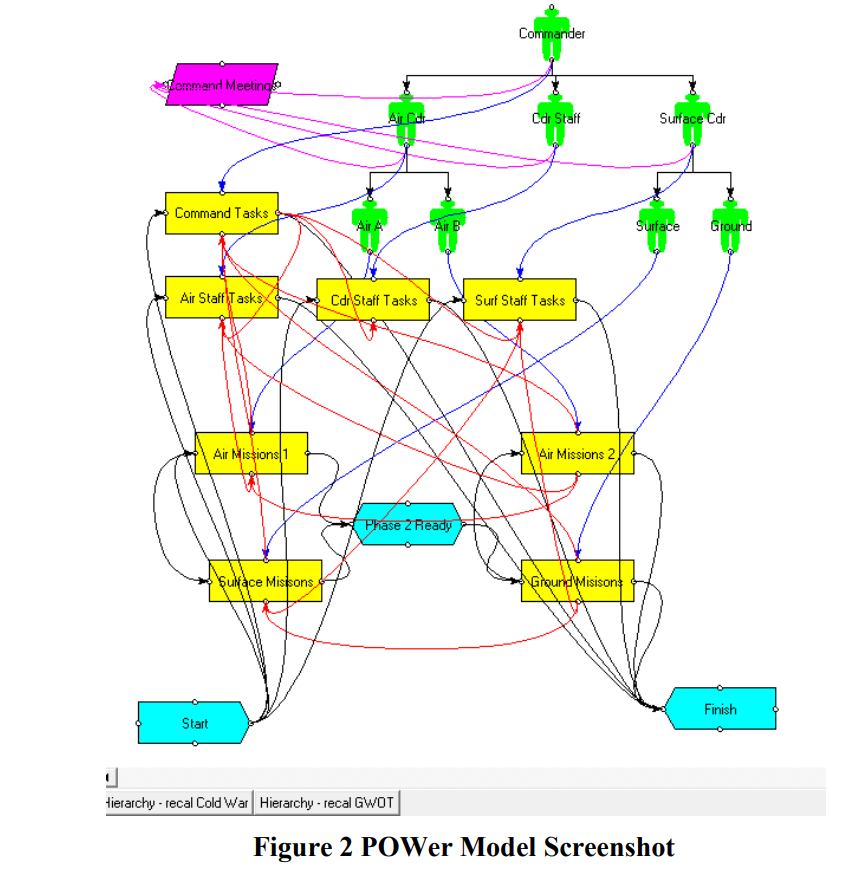
在本技术报告的其余部分,首先概述了 POWer 计算实验环境,并列举了一个实例,以帮助界定 DMO 组织和现象的计算建模。依次总结了研究方法。最后,总结了沿着这些方向继续开展研究的议程。这些成果将极大地提高理解和能力,使能够为 DMO 实现战斗员与传感器的集成,并为集成实施所需的系统能力和行为建模和概述。

