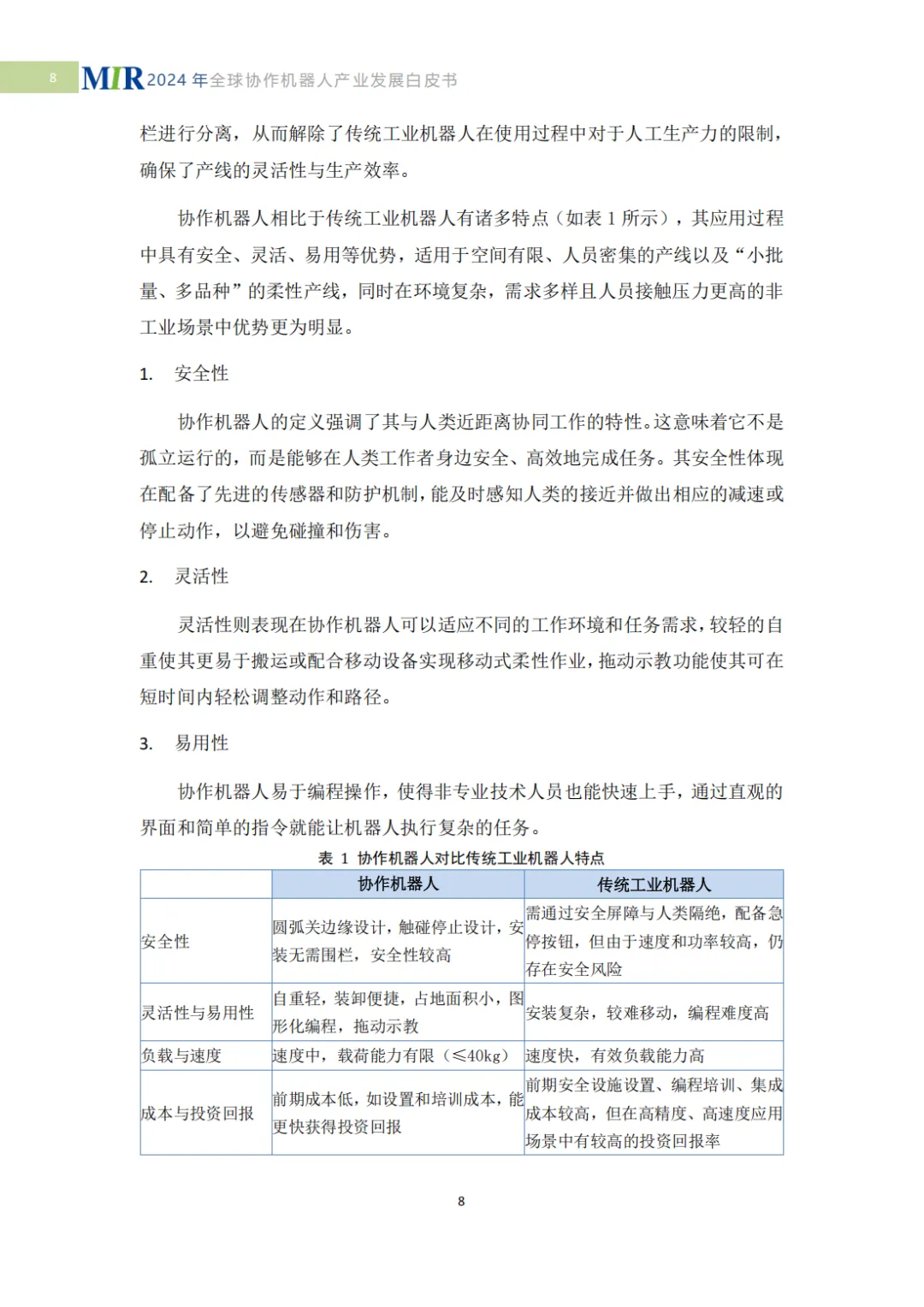
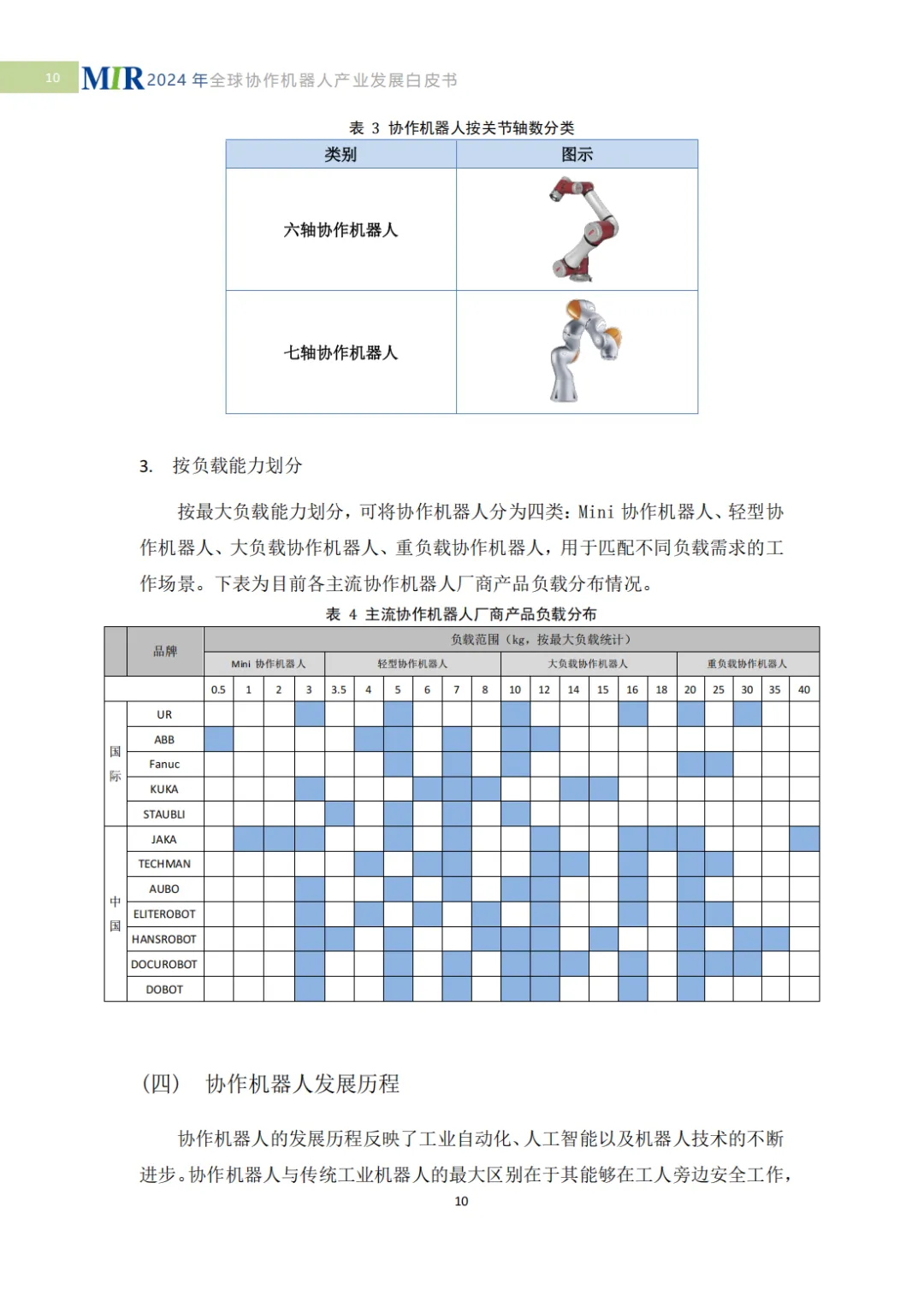
第一章:协作机器人定义与概述 (一)协作机器人定义 协作机器人(Collaborative Robots,图1)简称Cobots。 过去,行业里众多组织和平台对协作机器人进行了基本的定义。 国际标准组织(ISO)在ISO/TS 15066(协作型机器人技术规范)中定义:“协作型机器人是工业机器人的一个分支”,强调了协作机器人的起源;中国全国科学技术名词审定委员会定义:“为与人直接交互而设计的机器人”,强调了协作机器人的设计属性;美国专利局定义:“协作机器人是一种用于人与计算机控制的机械手之间直接物理交互的设备与方法”,更细化的说明了协作机器人的属性。 可以看出,这些定义主要强调了协作机器人的基本概念及设计理念。协作机器人发展至今,在结构和功能上不断实现创新,应用场景不断丰富,其定义也在这个过程中不断丰富及具象化。在本文中,我们将协作机器人定义为一种设计为六轴或七轴形态,用来与人类在共同工作空间、近距离、协同作业的智能化机器人,旨在协助人类在工业及非工业场景中完成重复的工作。 (二)协作机器人特点 与传统工业机器人不同,协作机器人拓展了机器人功能内涵中“人”的属性,使机器人具备一定的自主行为和协作能力,可在非结构的环境下与人配合完成复杂的动作和任务,使机器人真正成为人的合作伙伴,解决传统工业机器人应用的局限性。协作机器人应用于工业场景中时无需在工人与机器人产品之间设置隔离栏进行分离,从而解除了传统工业机器人在使用过程中对于人工生产力的限制,确保了产线的灵活性与生产效率。 协作机器人相比于传统工业机器人有诸多特点(如表1所示),其应用过程中具有安全、灵活、易用等优势,适用于空间有限、人员密集的产线以及“小批量、多品种”的柔性产线,同时在环境复杂,需求多样且人员接触压力更高的非工业场景中优势更为明显。 1.安全性 协作机器人的定义强调了其与人类近距离协同工作的特性。这意味着它不是孤立运行的,而是能够在人类工作者身边安全、高效地完成任务。其安全性体现在配备了先进的传感器和防护机制,能及时感知人类的接近并做出相应的减速或停止动作,以避免碰撞和伤害。 2.灵活性 灵活性则表现在协作机器人可以适应不同的工作环境和任务需求,较轻的自重使其更易于搬运或配合移动设备实现移动式柔性作业,拖动示教功能使其可在短时间内轻松调整动作和路径。 3.易用性 协作机器人易于编程操作,使得非专业技术人员也能快速上手,通过直观的界面和简单的指令就能让机器人执行复杂的任务。 (三)协作机器人分类 1.按结构形态划分 目前,协作机器人的结构形态分为两类:单臂协作机器人、双臂协作机器人(如表2所示)。单臂协作机器人是目前常见的,也是应用最多的结构类型,可用于大多数搬运、装配场景。双臂协作机器人则在需要更高程度的协同作业或需要进行复杂操作的任务中具有优势,常用于医疗手术、实验室操作、精细装配等领域。 2.按关节轴数划分 主流协作机器人按关节轴数可划分为六轴协作机器人和七轴协作机器人(如表3所示),用以满足不同应用场景对协作机器人灵活性的要求。其中,六轴是协作机器人最为常见的轴数,也是目前市场上协作机器人的主流形态,市场占比超90%,六轴机器人在具备良好的空间可达性基础上,具有较高的技术成熟度和性价比。目前业内也有四轴类“协作机器人”,但其形态设计、硬件构成和应用场景均与主流协作机器人存在较大差异,故此类机型不划分入协作机器人范畴。 七轴协作机器人相比六轴机器人,更加灵活,利用其冗余自由度可以通过更科学的运动轨迹规划达到良好的运动学特性,并且可以利用其结构实现最佳的动力学性能。 3.按负载能力划分 按最大负载能力划分,可将协作机器人分为四类:Mini协作机器人、轻型协作机器人、大负载协作机器人、重负载协作机器人,用于匹配不同负载需求的工作场景。下表为目前各主流协作机器人厂商产品负载分布情况。 (四)协作机器人发展历程 协作机器人的发展历程反映了工业自动化、人工智能以及机器人技术的不断进步。协作机器人与传统工业机器人的最大区别在于其能够在工人旁边安全工作,而不需要隔离护栏,且更加灵活、智能。以下是协作机器人发展的主要阶段: 1.萌芽阶段(1990s初期) 1995,美国通用汽车(GM)针对汽车行业痛点发起了研究项目,项目旨在找出让机器人变得足够安全的方法,以便机器人可以和工人协同工作。传统工业机器人需要严格的安全隔离措施,而“新型机器人”可以与人类共同作业,提高生产效率。1996美国西北大学两位教授首次提出了协作机器人的概念。 美国国家科学基金会(NSF)支持了早期协作机器人技术的研发,重点是通过感知与反馈系统,使机器人能够感知环境,并在有碰撞风险时自动停止或减速。 2.技术突破阶段(2000s) 2008年,丹麦公司Universal Robots发布了世界上第一台商用协作机器人——UR5。UR5可以在没有防护栏的情况下工作,并且其轻便、易编程和价格较低,迅速引发市场关注。 协作机器人核心技术也在这个阶段得到突破,最具代表的为力反馈技术,协作机器人通过使用力传感器,使其能够检测到外部施加的力,并作出相应反应,从而保证在人机交互时的安全性。 ISO 10218-1标准的发布,为协作机器人在人机协作的安全操作方面提供了规范,促进了技术的进一步发展。 3.快速增长阶段(2010~2020) 随着Universal Robots的成功,协作机器人市场开始快速增长。其他机器人公司如ABB、KUKA、FANUC等传统工业机器人巨头以及中国机器人公司也纷纷进入协作机器人市场,推出了各自的协作机器人系列(其中KUKA、FRANKA等以德宇航技术为基础,推出可实现高精度作业的七轴关节力控协作机器人)。 2011年,Rethink Robotics推出Baxter,进一步推动了协作机器人在中小型企业中的普及。协作机器人开始广泛应用于制造企业、汽车工业、电子行业、食品加工等领域,特别是在需要高精度和灵活性作业的任务中,如装配、打螺丝、焊接等。 2013年,优傲机器人(UR)进入中国市场,将协作机器人的概念带入了中国,打开了协作机器人在中国的应用局面。2014年,以节卡机器人(JAKA)为代表的一批“协作机器人新势力”诞生,这些公司有着上海交通大学等全球顶级院校的技术积累和自动化行业经验,短短数年在全球崭露头角,市场份额不断扩大。 2016年,国际标准化组织针对协作机器人发布了最新的工业标准——ISO/TS 15066:Robots and robotic devices—Collaborative robots,作为支持ISO 10218的补充文档,该标准进一步明确了协作机器人的设计细节及系统安全技术规范。由此,协作机器人在标准化生产的道路上步入正轨。 4.成熟与智能化发展阶段(2020至今) ①多领域扩展:协作机器人不仅限于制造业,还开始向其他非工业领域扩展,包括医疗、农业、服务业、特种领域等。比如,在医疗领域,协作机器人被用来执行外科手术辅助和康复训练;在服务业,协作机器人用于制作咖啡、汤面。 ②成本下降与普及:随着技术的成熟和生产成本的下降,协作机器人的价格逐渐降低,使得中小企业也能够负担得起,从而加速了市场的普及。 ③人工智能与协作机器人结合:协作机器人逐渐融入人工智能(AI)技术,特别是在机器视觉、自然语言处理和机器学习方面,协作机器人能够更好地感知环境,并根据实时数据进行决策。 机器人的操作变得更加智能和自动化。例如,通过AI视觉系统,机器人能够自动识别并抓取复杂形状的物体,或通过深度学习算法自主优化工作路径。 (五)协作机器人与人形机器人 受技术进步、市场需求的提升以及国家和企业战略布局等方面的推动,近两年,人形机器人热度较高。 1.人形机器人特点 人形机器人(humanoid robot)是具有类似人类身体结构的机器人,可通过仿效人类的姿态和活动,实现自然的人机交互。人形机器人通常配备以下组件: ①大脑(中央处理单元),负责决策和控制。②小脑(运动控制系统),负责协调运动和稳定性。③双臂,用于抓取和操作物品。④双足,负责提供行走和移动能力。⑤力觉传感器,负责感知触觉和施加的力量。⑥视觉系统,用于环境感知和对象识别。 2.协作机器人与人形机器人的趋同点 2.1技术基础的共通性: 协作机器人和人形机器人都强调人机协作。协作机器人专门设计用于与工人安全地并肩工作,而人形机器人也被视为未来能够在人类生活和工作环境中与人类互动的伙伴。在这一点上,协作机器人和人形机器人共同代表了人机交互领域的发展趋势。未来,随着技术的进步,具有人形外观的协作机器人可能会在一些特定的场合出现,尤其是需要更高程度的人类互动的应用中,这种机器人可能具备协作机器人的功能,又有着人形机器人相似的外形和移动能力。 无论是协作机器人在工业生产中的精准配合,还是人形机器人在复杂环境中的灵活动作,都依赖于运动控制、一体化关节手臂、传感器等核心技术的发展。其中,手臂关节是人形机器人实现场景化落地的重要执行单元。近期,JAKA推出双臂机器人JAKAK-1,可作为人形机器人组件系统,采用拟人型构造,具备人形机器人所需的小脑、双臂、力觉和视觉等成熟组件,未来将加速人形机器人市场的商业化进程。 节卡机器人(JAKA)具备成熟的关节设计经验,这使得JAKAK-1双臂机器人拥有更高的刚性,且运动控制更加平稳。JAKAK-1拥有丰富的SDK接口,能让研究者更简单更高效的进行双臂二次开发。同时,节卡机器人(JAKA)切入人形双臂领域,有利于推进当前人形机械臂多关节及模块化关节技术的发展。 2.2应用领域的交叉: 当前,协作机器人已成熟应用于工业领域,可协同人类工作,提高效率;此外也在非工业领域如消费品、教育、医疗、餐饮等市场加速渗透。当前人形机器人产业发展还处于初期阶段,应用场景仍有待探索。预计部分成熟且简单的工业场景和商业服务领域将优先成为人形机器人最先规模化落地的应用场景,之后人形机器人将逐步进入工业及商业通用场景、教育科研、特种行业、甚至家庭服务场景。未来,协作机器人和人形机器人会在工业及非工业中同时发挥作用。 3.协作机器人与人形机器人的发展关系 协作机器人是人形机器人手臂的基础,人形机器人概念大火将有利于加速协作机器人本体技术升级迭代,加快行业技术进步,进而促进行业快速发展。 尽管两者应用领域有部分重叠,但人形机器人和协作机器人在大多数场景中并不具备直接的替代关系,而是互补为主,更多是在各自擅长的领域中发挥优势。协作机器人在精准、稳定的工业任务中有明显的优势,而人形机器人则更擅长面对复杂的互动需求。协作机器人以其具备较多成熟的应用案例及更具象多样化发展路线,是机器人赛道未来发展路程上不可或缺的存在。