

Orbit Logic与科罗拉多大学博尔德分校(CU)合作开发了自主和响应性卫星集群控制(OSCAR)解决方案。OSCAR利用了Orbit Logic的传统自主规划系统(APS)机载规划/响应框架和CU的传统卫星编队飞行和轨道控制算法。这些技术共同构成了一种能力,允许行星轨道卫星群动态调整其配置,以适应不同的任务需求。OSCAR能够确定、规划和协调每个星群元素的相对移动,以实现满足各种需求的编队,包括 "星队",使前导卫星探测到的事件能够触发后续卫星的后续响应;"双长队",使赤道上空的覆盖范围更广;或单个/多个合成孔径,使多个资产元素能够协调收集空间驻留或行星表面数据。
引言
满足未来太空探索任务的一些需求将受益于异构航天器团队或星群之间强大而有效的自主协同操作。在远离地球的环境中自主运行这些航天器群的一个关键挑战是实现可靠的自动合作轨迹控制,通过高效的信息交换、机载资源的有效利用和最少的地面指令实现高精度的协调导航和控制。高精度的相对定位和定时是组成和维持稀疏孔径等编队的必要条件,这种编队使用多个带小型远距离望远镜的协调航天器,而不是一颗带巨型望远镜的卫星。稀疏/合成孔径方法结合了来自单一资产的跨时间数据,包括潜在的多个卫星轨道数据,与之相比,稀疏/合成孔径方法结合了多个卫星的数据,能够对快速变化的场景进行成像。这种技术的成像应用包括高空间分辨率成像、三维热成像和具有快速变化现象的领域,例如气态巨行星的大气成像。此外,在单个节点出现故障或性能下降的情况下,使用多个航天器可提供飞行任务级的弹性,因为剩余的健康元素仍可满足目标要求。
Orbit Logic和CU合作开发了自主和响应性星群控制(OSCAR)解决方案的设计和初始原型--旨在创建一个星载软件解决方案,使卫星集群能够参与协作规划和执行策略,以支持任务,与单个精致的航天器平台相比,卫星团队可以提供性能、响应性和弹性优势。
由科罗拉多大学(CU)自主飞行器系统(AVS)实验室和大气与空间物理实验室(LASP)联合开发的Basilisk天体动力学框架通过模拟运行验证了由此产生的OSCAR原型。Basilisk承载了卫星子系统面向功能的模型,这些模型代表了以前飞行的科学和探索任务。算法逻辑也已在代表当代卫星飞行处理器的计算元件上运行,以确认软件解决方案适合在受限的处理和内存环境中执行。
OSCAR方案的意义
NASA未来的空间探索任务设计提出了采用同质或异质卫星组的多种概念,包括以下两种情况:
1 航天器星队,由领头航天器触发后续航天器对非常动态的事件进行详细测量。
2 涉及分布式空间望远镜和分布式合成孔径雷达的任务,主要依靠协调和控制技术。
上述两个用例中的 "飞行编队 "不必仅限于特定的任务部署。相反,低心率星群(大约4至15颗卫星)应该有可能根据任务在不同时间或不同阶段的需要支持多种编队飞行配置。
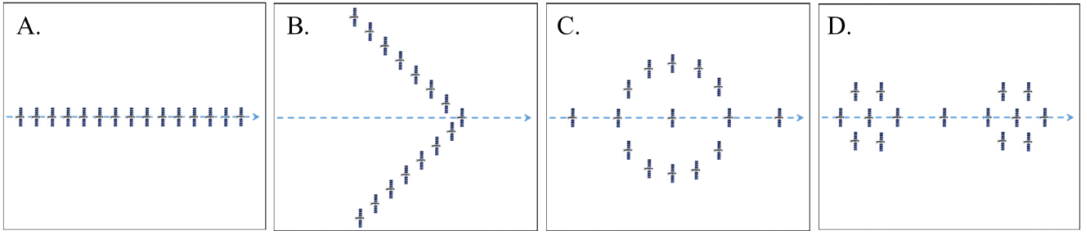
图1. 几种原型卫星轨道飞行编队配置,如A.领队-跟随者,B.交错扫掠梯队,C.和D.环形投影和领队-跟随者组合。
此外,卫星群应该能够计划和协调单个卫星在这些配置之间的移动,而无需任务控制的协助。OSCAR的星载自主性将确定何时这些编队中的一种适合满足特定任务需求(例如,为特定类型的科学采集做准备--或对意外动态事件做出响应),然后确定单个资产的分配以占据下一个编队中的不同 "插槽",以及每个资产导航到该插槽的方式,同时遵守平台级资源约束(性能限制、安全保留、保存消耗品)和星群级约束(在编队转换期间避免与其他资产碰撞)。图1以图形方式描述了与行星科学采集相关的几种卫星轨道飞行编队,其中卫星从左到右移动。
A展示了一个简单的 "星队"或"珍珠串 "编队。在这种编队中,走在最前面的卫星可以进行粗略成像,分担完成更大区域内单个采集的工作,或利用大气层剖面等视线仪器来确定 "触发条件",以显示高价值科学的可能性。这些事件的呈现将导致在车队中更靠后的卫星承担任务,使用不同的仪器(如高分辨率成像仪)更详细地捕捉事件。如果相关,这可能包括 "时间序列 "收集,以记录事件的时间演变。在许多情况下(取决于事件的时间尺度),如果任务控制在环内,则无法进行这种设想。蜂群的协调自主反应是确保及时应对此类临时事件的唯一方法。这种编队与A-Train等 "卫星列车 "任务有关,该任务使用7颗卫星和不同的传感器仪器套件来描述地球中层云的特征(如Kidder、Kankiewicz和Vonder Haar所述)。
B显示的是另一种编队--卫星排列成偏移的时变双梯队。这样就可以在每个轨道上覆盖两次宽阔的轨道带(在中央星体的两侧)。这样的编队可以最大限度地同时覆盖编队最分散区域的地表,确保通过期间收集的数据在时间上相当同步。在这一点非常重要的情况下(例如,确定行星昼/夜终结点的天气特征),这种编队最为有用。每轨道两次,在卫星轨道路径交叉期间,梯队的交错使卫星能够 "穿行 "而没有碰撞风险。
C展示了一种合成孔径编队,采用圆周投影相对轨道与领队-跟队相结合的方式。通过这种编队,某些资产可以作为大型天线的离散元件,其中一个资产专门作为 "馈送 "节点,接收收集的信号并将其合并为综合数据产品。另外,Bekey描述了特殊的车轮相对轨道,它允许在整个轨道上以最小的推力修正保持圆形相对半径模式(尽管 "天线 "周边旋转缓慢),利用每个轨道倾角和偏心率的微小差异进行自然轨道运动。该编队还包括一颗处于领先位置(合成孔径前方)的卫星,该卫星可用于探测感兴趣的信号,以提示使用孔径获取数据。此外,还有一个 "备用 "资产(位于编队后方),在其中一个活动部件出现故障时可 "替换 "到孔径编队中。
最后,D显示了一个变体,其中形成了两个合成孔径。这将允许两个采集活动分别平行进行。在不需要大部分或可用卫星节点组成的合成孔径所提供的分辨率,但又希望加快采集速度的情况下,这种编组方式非常有用。与单个合成孔径的情况一样,单个节点位于两个孔径之间。它可以用作通信中继(如果两个光圈相距甚远,无法直接通信),也可以用作检测和触发节点,提示两个光圈中的一个进行采集,或者用作热备用节点(如上段所述)。
OSCAR活动的主要重点是开发和验证一个初始软件原型,该原型将允许合作的卫星群动态规划和执行飞行编队之间的转换,以响应动态检测到的事件。
支撑技术
我们的团队汇集了两项关键技术来创建最初的OSCAR设计和原型。首先,我们利用Orbit Logic的自主规划系统(APS)作为OSCAR的分布式规划框架。其次,我们利用科罗拉多大学的Basilisk框架作为航天器的功能子系统接口,并支持行星环境中的动态卫星模拟。
OSCAR框架
OSCAR团队设计并实施了以模块化为重点的设计,并建立了能够验证解决方案关键能力的建模和仿真环境。所有新工作都按照模块化服务架构标准实施(我们使用AFRL的Aspire中间件来连接APS模块,并通过gRPC的protobufs来连接任务规划解决方案和航天器托管资源)。
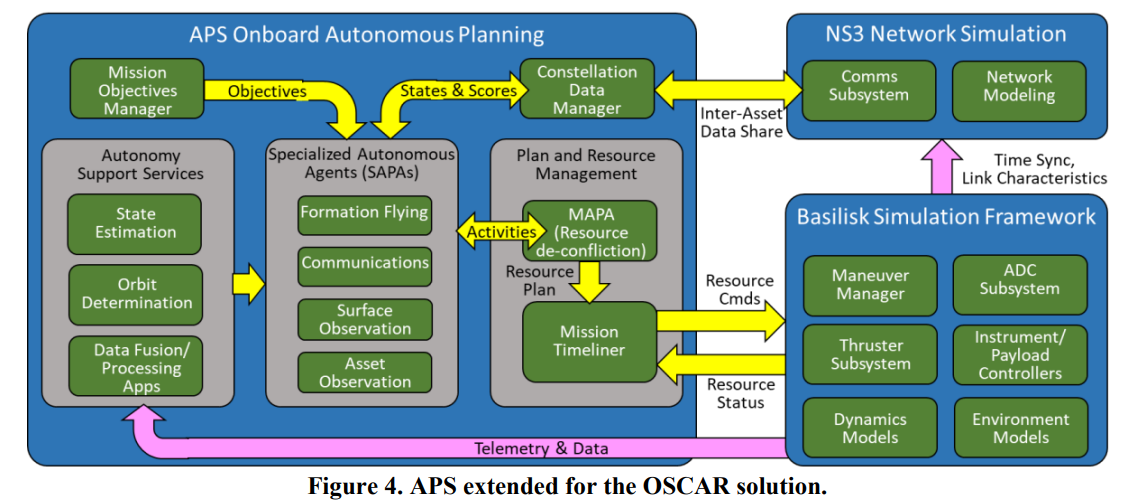
图4描述了我们的OSCAR原型开发工作所产生的基于APS的架构。它在很大程度上源于现有的相关工作。因此,图中很大一部分软件代码已经存在,只需要进行集成和配置,就可以进行有意义的功能演示。主要工作领域如下
1.我们扩展了星座数据管理器模块,使其能够将编队飞行配置实现的团队级目标分解为工作项,APS规划框架可以使用这些工作项来确定资产级分配,以实现这些目标。这涉及到对CDM数据库结构的添加,以管理这些映射和定义。
2.我们与CU合作,利用/扩展图中 "专业化自主代理 "框中显示的 "编队飞行SAPA "的代码。这使得APS规划系统能够确定卫星编队,以满足目标管理器断言的某些任务目标。这一新的SAPA考虑了团队中单个资产的状态/位,确定了在下一个编队中占据 "位置 "或 "角色 "的分配,并确定了完成过渡所需的机动(姿态控制和推进器应用的组合)。
3.为了规划编队航天器轨道调整所需的机动行为,开发了一个新的 "活动类"。这使得编队飞行SAPA模块能够与MAPA模块进行资产级资源解冲突。
4.我们为MAPA模块开发了一个新的资源插件,以方便与推进资源使用相关的指令和状态。这使得由MAPA生成的用于卫星轨道机动的解冲突计划能够由Mission Timeliner模块进行管理。
5.Orbit Logic与CU合作创建了一个定制转换器,用于映射APS报文标准和Basilisk报文协议。这使得APS能够以实时模式与Basilisk互操作,以获取卫星资源状态/状态,并向Basilisk模拟的卫星子系统发出资源级命令。在最初的原型开发和验证工作中,姿态控制、推进器和候选仪器/载荷都被连接起来。这些扩展的完成促进了涉及硬件在环的实时系统仿真。
