自动驾驶
·

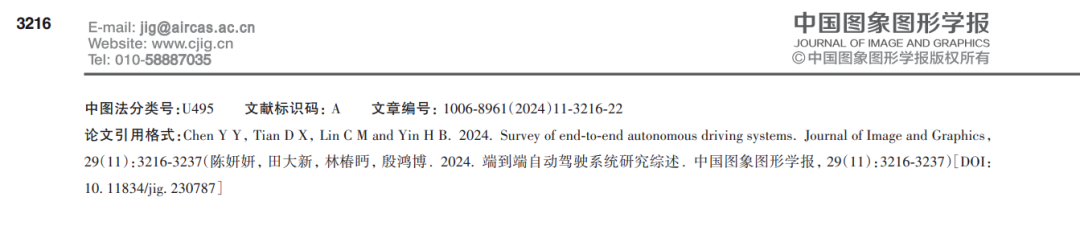
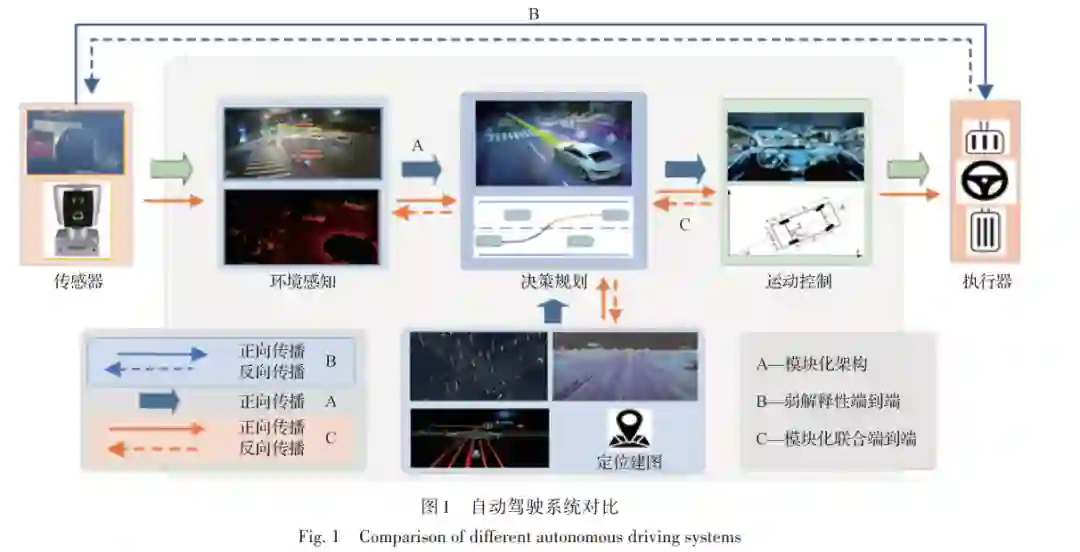
近年深度学习技术助力端到端自动驾驶框架的发展和进步,涌现出一系列创新研究议题与应用部署方案。本文首先以经典的模块化系统切入,对自动驾驶感知—预测—规划—决策4大功能模块进行简要概述,分析传统的模块化和多任务方法的局限性;其次从输入—输出模态到系统架构角度对当前新兴的端到端自动驾驶框架进行广泛地调研,详细描述弱解释性端到端与模块化联合端到端两大主流范式,深入探究现有研究工作存在的不足和弊端;之后简单介绍了端到端自动驾驶系统的开环—闭环评估方法及适用场景;最后总结了端到端自动驾驶系统的研究工作,并从数据挖掘和架构设计角度展望领域潜在挑战和亟待解决的关键问题。 https://www.cjig.cn/zh/article/doi/10.11834/jig.230787/
成为VIP会员查看完整内容
相关内容
Arxiv
153+阅读 · 2023年3月29日
相关主题

相关VIP内容
相关资讯
相关论文
Arxiv
153+阅读 · 2023年3月29日