
随着机器人技术日益精进,亟需发展能与人类队友及其他机器人交互协作的智能系统。本研究旨在探索多智能体(含人类与机器人)协同框架,聚焦智能体间交互层级与队友信息推断机制。首先在协同导航范畴内研究单人-单机器人协作,该场景需直接人机交互与队友状态推断。考虑人机需穿越环境抵达共同目标的情境,提出两种触觉引导系统:通过力反馈向人类提供避障与路径建议,各具计算效率与路径最优性优势。解析与实验证明该方法能同步保障避障与目标引导功能。
首项工作解决双智能体协作后,后续研究转向多智能体协作——该场景下人机交互有限且队友信息层级各异。针对异构多智能体团队(各机器人具不同感知/资源能力),提出控制策略以实现复杂动态任务分配,使团队能适应任务变化与成员变动。分布式架构支持大规模应用,分析表明策略可在动态环境中收敛至最优解,仿真与硬件实验验证其性能媲美基准算法。
核心贡献
第三章3.2节提出地面机器人协同遥操作触觉引导算法,仅提供必要反馈。融合避障功能(障碍物排斥力)与路径引导功能(建议路径吸引力),建议路径由非完整约束快速扩展随机树(RRT*)算法生成。突破传统触觉遥操作范式,首次提供避障安全性解析证明(用户遵循力反馈时可规避碰撞)。
第三章3.3节将RRT采样树融入控制李雅普诺夫函数(CLF)框架,生成运动学可行路径的触觉建议。为保障安全,引入控制屏障函数(CBF)提供防撞指引而无需重采样RRT树。解析证明当用户遵循力反馈时,CLF驱动力可引导机器人从环境任意点抵达共同目标。
第四章实现多机器人团队持久自适应覆盖控制,服务于动态异构任务需求(可泛化至各类资源补给算法)。通过解析证明区位成本最小化与需求输入-状态稳定性。为确保持久性,提出分布式补给算法——兼容异构团队并利用需求与资源水平预测,显著降低服务中断率。
第五章构建多机器人响应离散异构事件框架:通过任务执行建立个体信誉度,据此生成加权维诺分区。采用核密度估计(KDE)动态更新事件密度函数以适应需求变化,证明维诺生成器收敛于加权区位成本临界点。针对时限任务,提出蚁群系统(ACS)启发的任务排序算法,证明其高概率收敛至最优解(该解在最小化机器人能耗同时,优先保障紧急时限任务)。
全文结构
第二章阐述符号体系与数学基础;第三章详述两种人机协同导航方法;第四章提出多资源分配覆盖控制策略;第五章以智能体信誉度为核心构建时限/非时限任务服务机制;第六章总结并展望。附录A收录符号索引。
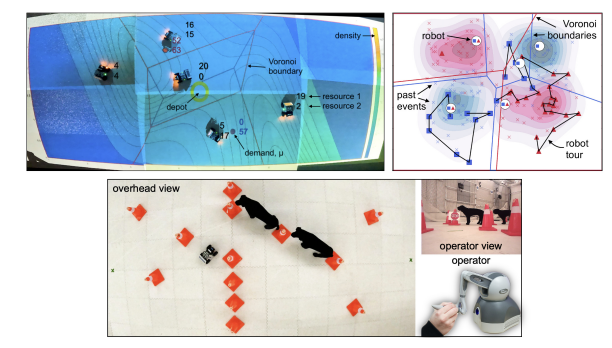
图1·2:本论文研究协同自主性的三种实现形态。第四章与第五章探讨多智能体协同团队(上图),第三章解析人机协同导航(下图)。
