
目前的自动空中加油(AAR)工作利用机器视觉算法来估计接收飞机的姿势。然而,这些算法取决于几个条件,如精确的三维飞机模型的可用性;在没有事先给出高质量信息的情况下,管道的准确性明显下降。本文提出了一个深度学习架构,该架构基于立体图像来估计物体的三维位置。研究了使用机器学习技术和神经网络来直接回归接收飞机的三维位置。提出了一个新的位置估计框架,该框架基于两个立体图像之间的差异,而不依赖于立体块匹配算法。分析了其预测的速度和准确性,并证明了该架构在缓解各种视觉遮挡方面的有效性。
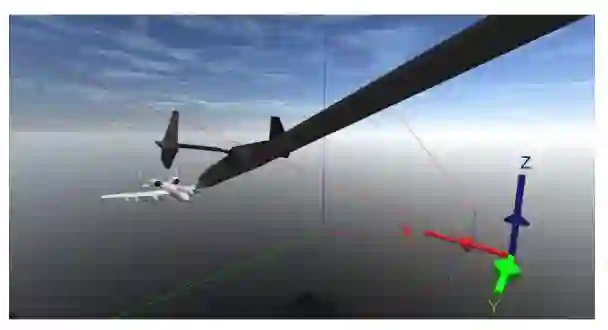
图3:利用的坐标系统。红轴代表X轴,绿轴代表Y轴,蓝轴代表Z轴。所有显示的箭头表示该轴上的正方向。
成为VIP会员查看完整内容
相关内容

Arxiv
224+阅读 · 2023年4月7日
Arxiv
153+阅读 · 2023年3月29日


相关VIP内容
相关资讯
相关论文
Arxiv
224+阅读 · 2023年4月7日
Arxiv
153+阅读 · 2023年3月29日