本文探索了既能提供全覆盖路径规划,又能避开负面障碍物的方法。这些方法专门针对无人地面车辆(UGV),因为它们需要不断与可穿越的地面进行交互。在仿真中测试了多种潜在解决方案,并在本文中介绍了测试结果。对全覆盖路径规划器(FCPP)方法进行了评估,主要是看它们是否能将路径离散化,是否能有效地使用航点,以及是否能与当前的机器人平台轻松集成。对于负障碍物,探索了能与当前导航堆栈集成的方法。首选解决方案将允许远程操作、航路点导航和完全自主,同时避开正面和负面障碍物。
2021 年 9 月,在 2022 年陆军机动支援和维持能力发展集成局主办的机动支援、维持和保护集成实验(MSSPIX)中展示了机器人平台。在为期三天的时间里,三名士兵接受了使用机器人平台的培训。士兵们学会了使用手动导航、半自动航点导航和自主探索来绘制隧道和建筑物内部地图。该团队成功展示了一种平台无关的无人地面运载工具(UGV)边缘计算(利用机载硬件做出毫秒级低延迟决策)和传感器有效载荷,用于勘测和绘制内部结构(包括地下环境)。具体来说,UGV 能够在士兵不进入潜在危险环境的情况下实现三种操作模式:远程操作、航点导航或自主绘图。根据这些经验和士兵的反馈,团队确定了导航需要改进的两个方面。
起初,假定在电池容量有限(约 3 小时)的情况下,自主导航的主要目标是在最短时间内覆盖尽可能多的地面。因此,采用了基于前沿探索的方法。在这里,前沿被定义为机器人已经探索过的区域和尚未探索的区域之间的边界。优先考虑数学上最大的边界。在这种情况下,可以在相对较短的时间内提供一栋建筑的整体平面图,但较小的房间则无法彻底探索。因此,如果行动概念(CONOP)也涉及到识别感兴趣的对象,那么这种方法就有可能错过感兴趣的对象,尤其是如果该对象位于较小的房间中。因此,团队研究了可用于彻底探索房间的全覆盖路径规划器 (FCPP)。本报告的一个方面就是讨论如何使用全覆盖规划器。
MSSPIX 22 演示中出现的另一个问题是负面障碍物。虽然机器人能够很好地识别和避开正面障碍物,但负面障碍物,如下楼梯或地板上的洞,却超出了机器人的初始能力。由于在演示之前已经知道了这些负面障碍物,因此能够使用虚拟障碍物来阻止机器人探索这些区域。然而,必须开发一种方法来处理负面障碍,尤其是在无法获得事先知识的情况下。因此,本报告的第二个方面侧重于识别负面障碍。
本报告涉及《陆军多域情报》中确立的重点领域: 21-22 财年科技重点领域》(参谋部副参谋长办公室,2020 年)中确定的重点领域。具体而言,认为这项工作涉及到 "战争将以超高速、超大规模进行,由机器人和自主系统(RAS)、机器学习(ML)和人工智能(AI)能力等技术主导,这些技术可广泛获取、打包并随时投入使用"(5)。通过整合全覆盖规划和检测负面障碍物的能力,实现了创建更高效自主系统的目标。
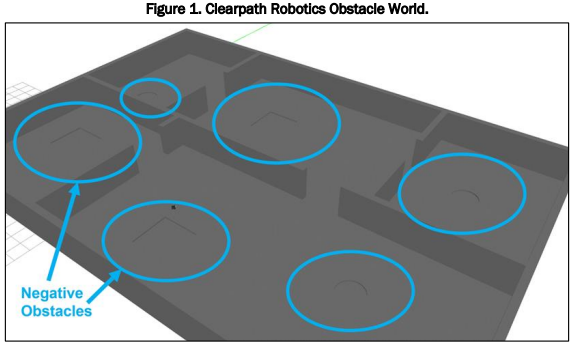
方法包括在模拟中运行全覆盖规划器和负障碍物检测方法。为了测试这两种方案,使用了 Clearpath Robotics(2021 年)公司的 "障碍世界"。障碍世界是一个虚拟定义的室内世界,可作为全覆盖规划器的封闭区域,而非平面地板则可用于负障碍物检测的模拟测试。图 1 显示了模拟环境中的世界。整个世界中出现的负障碍物都被标注出来。用于加载虚拟环境和机器人的完整启动文件可在 0 部分附录 A 中找到。启动文件中包含的几个参数可用于调整环境,包括机器人的起始位置和世界比例。为了启动世界,使用了以下节点: 在这里,节点被定义为执行计算的进程。
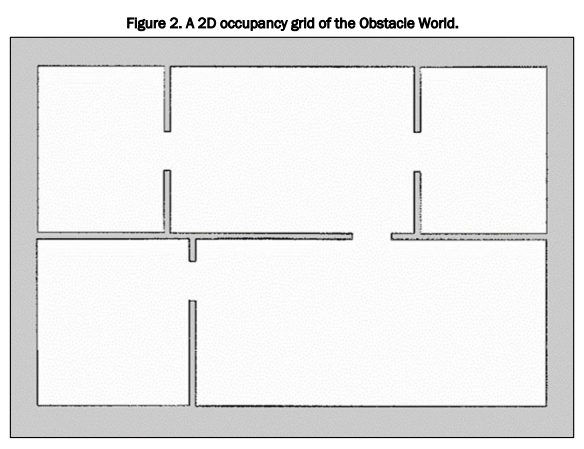
目标是利用全覆盖规划器彻底探索每个房间,同时利用负障碍物检测节点防止机器人被卡住。全覆盖规划器需要一个占用网格来规划路径。图 2 显示了用于路径规划的占用网格。由于占用网格通常是三元网格,空间通常被标记为占用(黑色)、空闲(白色)和未知(灰色)。因此,负障碍物无法识别,规划的路径将穿越非平面楼层几何体。负障碍物的大小与车轮直径大致相同,这意味着如果机器人掉入负障碍物中,将不太可能逃脱,从而无法完成任务。