
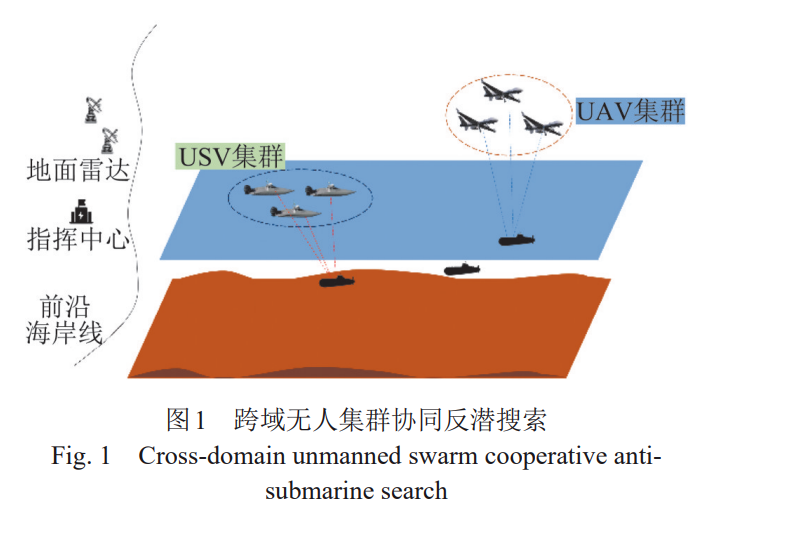
针对海上反潜搜索问题,提出一种将无人艇作为无人机的通信中继的跨域无人集群协同搜索方法,采用数字网格地图表征任务区域,构建了跨域平台的运动学模型;提出了跨域无人系统的协作方法,设计了无人系统之间的分布式信息融合机制;设计了异构平台的搜索目标函数,引导无人系统在搜索任务中实时决策。仿真结果表明:所提方法能够有效适用于文中反潜搜索任务想定,跨域平台之间能够通过优势互补提高搜索效能。
成为VIP会员查看完整内容
相关内容

Arxiv
42+阅读 · 2023年4月19日
Arxiv
223+阅读 · 2023年4月7日
Arxiv
152+阅读 · 2023年3月29日
相关VIP内容
相关资讯
相关论文
Arxiv
42+阅读 · 2023年4月19日
Arxiv
223+阅读 · 2023年4月7日
Arxiv
152+阅读 · 2023年3月29日