
在战场环境中,敌方常对GPS信号实施干扰或欺骗,因此需采用替代方法实现部队定位与安全导航。基于视觉的定位方法(如同步定位与建图SLAM、视觉里程计VO)依赖传感器融合且计算负载较高,而无测距定位方法(如DV-HOP)在动态稀疏网络拓扑中面临精度与稳定性问题。本文首次提出一种基于地标定位(LanBLoc)与战场专用运动模型(BMM)的导航方法LanBLoc-BMM,并辅以扩展卡尔曼滤波器(EKF)。通过在合成与真实轨迹数据集上,将该方法与三种集成BMM及贝叶斯滤波器(EKF与PF)的现有先进视觉定位算法进行效能对比,结果表明:在真实数据集中,LanBLoc-BMM(EKF)以平均位移误差(ADE)0.2393、最终位移误差(FDE)0.3095、平均加权风险评分(AWRS)0.1528及运行时间14.94毫秒的综合表现优于所有对比算法。
进一步,本文提出两种集成LanBLoc-BMM(EKF)的安全路径导航算法——SafeNav-CHull与SafeNav-Centroid。SafeNav-Centroid依赖安全路径段的质心进行移动决策,而SafeNav-CHull利用路径段的凸包结构。两种算法均整合新型风险感知RRT(RAw-RRT)算法实现避障与风险暴露最小化。本文引入平均加权风险评分(AWRS)作为评估轨迹风险暴露的新指标,构建模拟战场场景进行安全路径导航测试,并从位移误差、风险暴露、计算时间与轨迹长度等维度评估所提算法的性能。实验表明:SafeNav-Centroid在ADE、FDE、AWRS及平均百分比误差方面表现优异,而SafeNav-CHull则在计算时间效率上达到最优。
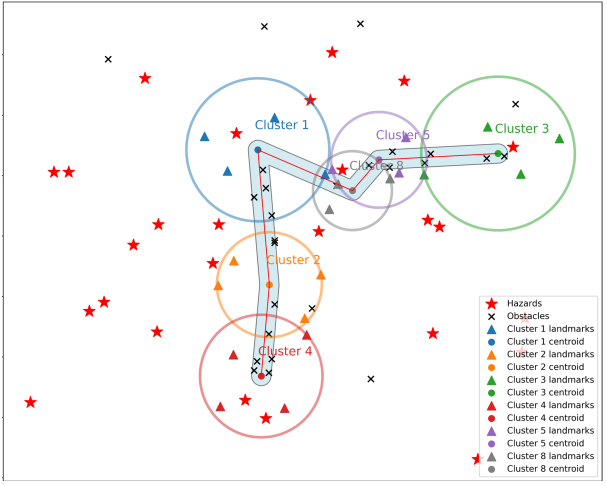
图1. 战场环境示意图,包含密集分布的地标簇、障碍物与危险组分。从簇4质心延伸至簇3质心的安全路径缓冲带标识无风险区域,引导移动实体安全规避障碍物并最小化风险暴露。
在军事行动中,安全导航需要精准可靠的定位系统[1]、路径规划以及对抗条件下的机动决策支持系统。因此,定位算法是安全导航的核心,尤其在战场上,精确的位置、时间同步与协调对部队和地面载具的机动至关重要。在GPS干扰、地形障碍与威胁普遍存在的对抗场景中,鲁棒的导航系统对任务规划与作战效能维持具有决定性作用。此外,随着无人地面载具(UGV)与无人飞行器(UAV)等自主系统成为现代战争的核心要素,对高精度、强韧导航能力的需求持续增长。这些系统通过确保安全性、时效性与协调性,支撑战场机动与任务执行的成功。
挑战:GPS虽能提供可靠定位数据,但其对卫星信号的依赖使其在作战场景中易受干扰与欺骗[2]。针对GPS拒止环境下的定位与导航难题,已开发出多种方法,包括同步定位与建图(SLAM)[5]、视觉里程计(VO)[7]及DV-Hop定位[11]等非GPS技术。在GPS不可靠或失效时,SLAM通过构建未知环境地图并同步跟踪个体或载具位置实现定位;VO则通过跟踪机载摄像头连续视频帧中的视觉特征(如边缘或角点)运动,估计移动目标的位姿。尽管SLAM与VO在姿态估计与导航(尤其是GPS拒止环境)中表现强大,但其在战场安全导航中存在局限性:处理高分辨率数据或复杂3D环境时需高算力,对小型化、电池供电或快速响应系统构成制约;且需多传感器融合技术[19],这在士兵使用小型电池供电设备的战场资源受限场景中难以实现。为应对上述挑战,文献[4]提出LanBLoc框架——一种面向非GPS战场环境的定位方案,利用立体视觉与地标识别,仅依赖被动相机传感器与地理地标作为定位参考。然而,该方法未解决基于地标定位的非GPS环境导航与运动规划问题,这正是本研究的核心目标。
研究贡献:本研究聚焦于利用LanBLoc作为定位测量模型,在非GPS环境中高效引导移动军事单位、地面载具或侦察单元(统称为移动实体,ME)沿安全路径导航。安全路径指战场中最小化危险暴露风险的导航边界,确保ME从起点至终点的安全、高效与成功导航(如图1所示)。为实现目标,本研究首先定义地面移动对象的运动规划模型,并针对战场场景提出“战场运动模型(BMM)”,捕捉地形障碍与威胁等非线性动态特性。随后,提出导航方法LanBLoc-BMM,将LanBLoc作为定位测量模型,BMM用于运动规划,分别集成扩展卡尔曼滤波器(EKF)[17]与粒子滤波器(PF)[18]以处理战场地形未建模干扰。通过在合成与真实轨迹数据集上,将LanBLoc-BMM与文献中的先进视觉定位方法(如DeepLoc-GPS、DeepLocEKF-GPS[8]、多传感器融合[19])进行性能对比,实验表明:集成EKF的LanBLoc-BMM在两类数据集中均展现出最优导航性能,验证了LanBLoc框架作为战场导航定位测量模型的有效性。因此,基于LanBLoc-BMM(EKF)的导航方法可支撑移动实体在GPS拒止战场环境中的起点至目标导航(如图1所示)。该导航方法假设战场环境中存在足够的地标(位于移动实体探测范围内)以支持三边定位(如文献[4])。图中圆形区域表示地标簇,从簇4质心延伸至簇3的带状边界区域代表安全路径。
安全路径导航算法:为确保移动实体安全,本研究进一步提出两种算法——SafeNav-CHull与SafeNav-Centroid,通过安全状态检查与路径边界内受控机动实现安全保障。两种算法均与LanBLoc-BMM(EKF)集成,支持沿安全路径的高效导航。为处理路径内障碍物,本研究改进快速扩展随机树星算法(RRT),提出“风险感知RRT(RAw-RRT)”,定义新型风险感知成本函数。SafeNav-Centroid计算安全路径段的质心以控制单元机动,确保安全性与最短轨迹;SafeNav-CHull则对路径段的凸包[13]进行点-多边形测试[15],实现安全验证与控制输入计算。RAw-RRT确保生成无障碍、路径最短且风险最小的轨迹。
性能评估:采用平均位移误差(ADE)、最终位移误差(FDE)与百分比误差等指标评估算法性能,并定义“平均加权风险评分(AWRS)”衡量轨迹风险暴露程度(基于轨迹点偏离危险边界的程度)。研究成果如下:
- LanBLoc-BMM(EKF)在合成数据集中取得ADE/FDE 0.4972/0.4675、最小AWRS 0.3492及最短运行时间3.98ms;在真实数据集中取得ADE/FDE 0.2393/0.3095、AWRS 0.1528及运行时间14.94ms,均优于对比算法。
- SafeNav-Centroid轨迹估计平均百分比误差为5.46%,较SafeNav-CHull提升16.12%;其ADE/FDE为1.11/0.99米,分别比SafeNav-CHull优1.67倍与3.30倍。SafeNav-Centroid风险暴露更低,而SafeNav-CHull计算效率更高。总体而言,SafeNav-Centroid生成风险暴露最低的最短路径,SafeNav-CHull则以更高计算效率提供可比结果。

