
国防系统中的系统设计是一个竞争激烈的领域,其经济可行性依赖于一连串的架构决策,旨在实现质量、资源和时间(Q,R,T)的折衷。注意到,低成本无人地面战车(UGV)和无人机成为当前战场上的新威胁。为应对这些新威胁,陆军总司令部(Direction Générale de l'Armement,DGA)组织了围绕战场机器人化的挑战,以设计未来的使用理论,并帮助技术在合理的时间内达到成熟。本文介绍了基于北约架构框架(NAF)3.1的工作流程,其中包括每年迭代的此类挑战的实战经验回报。所描述的能力是与之相匹配的要求,组成系统基于现成组件(COTS),可同时应对两个版本的挑战。本文详细介绍了如何通过手动方式将现场反馈重新注入系统模型,从而无法确保下一次挑战赛的迭代。作品就 “工程泄漏问题 ”的表述提出了结论,并说明了如何解决这一问题是 NP-Hard(近乎困难),并应使用优化方法来解决。
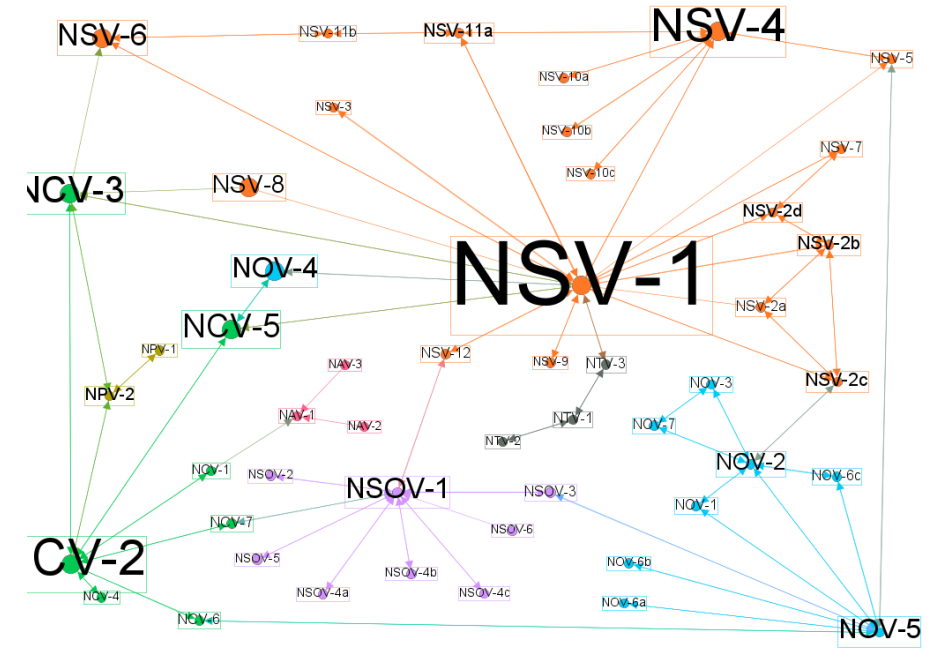
图 1:NAF 3.1 的元模型:由 49 个节点组成的星座,以不同视角着色
成为VIP会员查看完整内容
相关内容

Arxiv
224+阅读 · 2023年4月7日
相关VIP内容
相关资讯
相关论文
Arxiv
224+阅读 · 2023年4月7日