
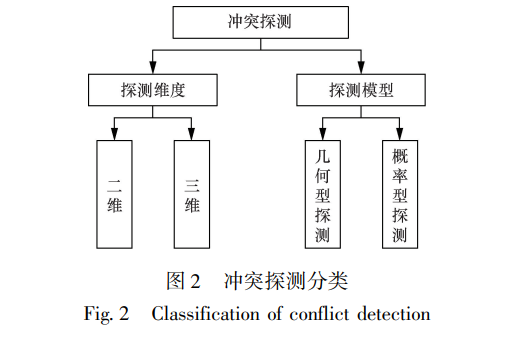
近年来,无人机已广泛应用于电力巡检、森林保护、快递配送、交通监控等领域,无人机技术得到飞速发展。 无人机 具有数量多、体积小、速度快等特点,无人机进入非隔离空域成为必然趋势,而冲突探测与解脱技术也成了当下的重点研究方 向。 冲突探测与解脱技术的提高对无人机飞行安全和飞行效益具有重要意义。 系统地梳理了当下中外的研究成果,对无人 机冲突探测与解脱问题进行了概述。 综述了冲突探测与解脱的模型,从理论模型的角度阐述了冲突解脱的目标和约束条件; 并从方法论的角度对冲突探测与解脱的常用方法进行了总结。 最后从现有研究的不足出发,对无人机冲突探测与解脱未来 的研究趋势和方向进行了展望。 随着无人机技术的迅速发展,无人机数量急剧 增加。 2021 年底,《“十四五” 民用航空发展规划》 提出要着力提升同行服务水平,大力引导无人机创 新发展[1] 。 无人机凭借其灵活度高、低能耗和实时 监控能力,已广泛应用于监测、成像等领域。 无人 机数量的迅速增加给空域交通安全带来了挑战。 当前风险主要集中于无人机故障、无人机“黑飞”对 行人和基础设施的风险,以及无人机飞行冲突的风 险。 为了在不同应用场景下保障无人机的飞行安 全,提高空域运行效率,冲突探测与解脱技术作为 保障无人机飞行安全的关键技术,需要进行重点 研究。 现整理中外有关无人机冲突探测与解脱的相 关文献。 首先介绍无人机冲突探测与解脱的相关 概念;其次对无人机冲突探测方法进行总结;然后 从理论模型的角度介绍当下无人机冲突解脱的目标及约束条件,并介绍主要解脱方法;最后对未来 可研究方向进行展望。
成为VIP会员查看完整内容
相关内容

Arxiv
223+阅读 · 2023年4月7日
Arxiv
86+阅读 · 2023年4月4日
Arxiv
152+阅读 · 2023年3月29日
Arxiv
85+阅读 · 2023年3月21日

相关VIP内容
相关资讯
相关论文
Arxiv
223+阅读 · 2023年4月7日
Arxiv
86+阅读 · 2023年4月4日
Arxiv
152+阅读 · 2023年3月29日
Arxiv
85+阅读 · 2023年3月21日