国外无人水下航行器装备与技术现状及展望
摘 要: 当今,无人水下航行器(UUV)已成为世界各国海军争相研制的“热点”装备,文中立足于国外UUV的发展历程及发展规划,通过参阅大量文献,详细梳理了各国UUV发展的主要研究机构,介绍了美国、俄罗斯、日本、韩国及主要欧洲国家典型UUV装备应用情况和重要技术指标,着重分析了当今国外UUV能源技术、自主控制技术、导航技术、通信技术及负载技术的发展现状,展望了UUV未来发展方向。
关键词: 无人水下航行器; 性能指标; 研究机构; 典型装备
0 引言
近年来,随着信息战向反潜战场的延伸及现代战争追求人员零伤亡理念的发展,无人作战系统已成为世界各国军事装备的研发重点,其重要组成部分的无人水下航行器(unmanned undersea vehicle,UUV)必然成为世界各国争相研制的“热点”装备。
UUV是一种主要以潜艇或水面舰船为支援平台,能长期在水下自主航行并可回收的智能化装置,借助母平台可搭载多种传感器、专用设备或武器模块,并可执行特定的任务使命。当今,UUV以其自主性、灵活性和多用途性,被越来越广泛地应用于水下战场侦察/监视、情报收集、预警探测、通信中继、环境调查、有效载荷预置、水声对抗、目标感知与识别、猎雷、布雷、跟踪打击及后勤支援等诸多领域[1],在未来海战中具有越来越重要的地位。根据自主性等级,可将UUV分为遥控式无人水下航行器(remotely operated vehicle,ROV)和自主式无人水下航行器(autonomous undersea vehicle,AUV) 2类。任务包涉及水下侦察、搜索、探测、识别、猎扫雷、时敏打击和打捞回收等功能模块。其中,ROV拖带有用于控制和动力的光电缆,由人工进行控制;AUV则自带能源动力,采用自主控制模式。
1 发展历程
UUV的研制最早始于20世纪50年代末,主要用于海洋科学研究。20世纪70年代,UUV常通过遥控方式被用来执行搜探失事潜艇、反水雷等军事任务。20世纪 80~90年代,随着小型化组合导航、远程水下通信、小型低能耗计算机等技术的突破,UUV开始具备半自主控制能力,但由于成本高,未正式列装。到20世纪90年代末,随着技术的进一步成熟,UUV在民用领域得到了广泛应用,并借助成熟商用技术使其成本明显降低,逐步出现具备反水雷等功能的 UUV并装备部队[2]。
21世纪以来,UUV的自主控制水平和推进动力源比能得到了进一步提高,其任务开始向反潜、水下侦察等领域扩展。期间,美国先后 2次修改了UUV的发展主规划,在2007年后,将空中、水下和地面多维空间的无人系统进行整合,每2年发布一次《无人系统发展路线图》并滚动修订,最新版截至为2013年发布的《无人系统综合路线图(2013-2038)》。对军用 UUV发展影响较大的是2011年美海军发布的《水下战纲要》,其中提出要加强对大型UUV、特种作战航行器、水下分布式网络、全球快速打击系统等有效负载的利用。针对所开发的有实用价值的研制样机(如大排量 UUV),为能尽快列入部队服役,2016年美国防部变革了 UUV的采购办法,采用边研制边采购入役的办法,以期缩短获得新研 UUV的采购时间[3]。
欧洲针对 UUV的研究一直在展开,一些关键技术的研究更优先于美国。2010年,欧洲防务局(European defence agency,EDA)发布了《海上无人系统方法与协调路线图》,提出协调欧洲各国力量,共同促进UUV等系统的发展。图1列举了国外一些典型UUV的发展历程[4-5]。
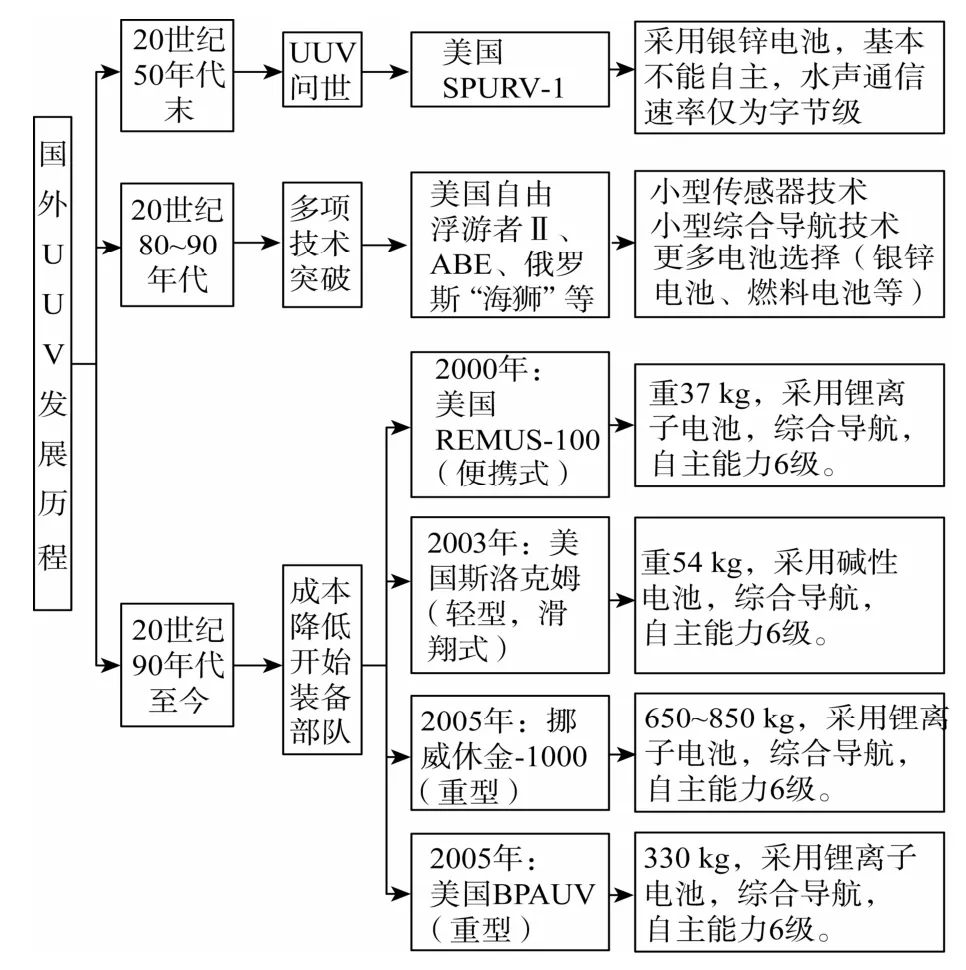
图1 国外典型无人水下航行器发展历程
Fig. 1 Development process of typical unmanned undersea vehicle(UUV) abroad
2 主要研究机构
据不完全统计,目前国外主要有十多个国家20多家科研机构在从事UUV的研究开发(见图2),来源主要有以下几方面。
公司类机构: 美国的蓝鳍金枪鱼机器人公司、波音公司、洛·马公司、哥伦比亚公司、通用动力公司、水螅公司、伍德·霍伊公司、诺斯罗普·格鲁曼公司等。德国的ATLAS电子公司、法国的 DCNS、意大利的Gaymarine、瑞典Saab水下系统、英国的BAE水下系统、挪威的Kongsberg Maritime公司、澳大利亚国防科学技术研究院等。
军方类研究机构: 主要为美国的海上系统司令部、海军水下战中心、海军研究局、国防高级研究计划局、海军海洋局、海军研究实验室等。
大学类研究机构: 主要有美国的华盛顿大学、宾夕法尼亚州立大学应用物理研究所、加州大学、麻省理工学院、威斯康辛大学及挪威海洋大学等。
文中着重对美海军部分研究机构进行说明[6]。
1) 美国海军水下作战中心(naval undersea warfare center,NUWC): 研制有大直径 UUV(LDUUV)和直径21 inch的UUV(21UUV)。
2) 美国海军研究局(office of naval research,ONR): ONR的工程部、材料部、物理科学和技术部都在从事UUV的研究工作,主要涉及UUV的能源与推进、续航力、传感器信号处理、通信、使命管理控制、导航和运载器设计等。
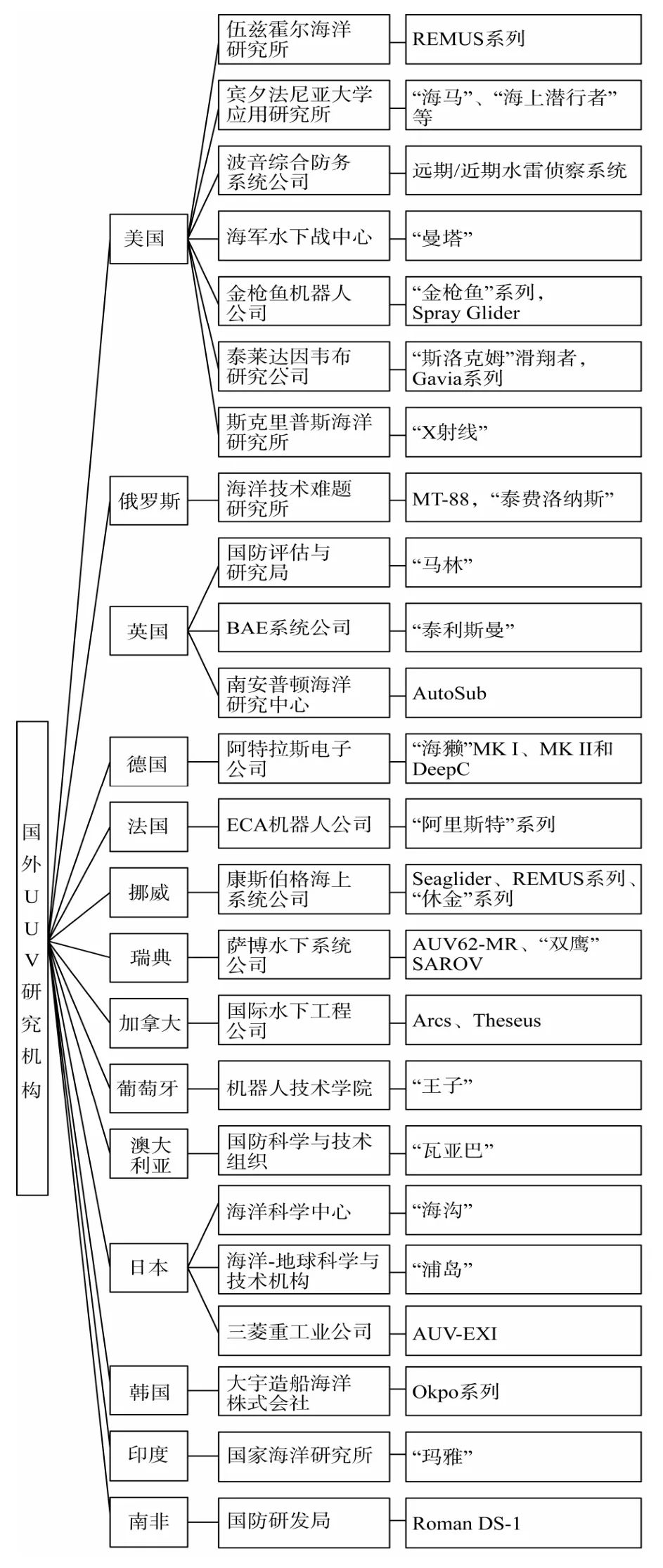
图2 国外主要UUV研究机构
Fig. 2 Major foreign research institutes for the UUV
3) 美国海军空间和海战系统(space and naval warfare systems command,SPAWAR)中心: 主要从事AUV的指挥和控制系统、光纤和水声通信系统、非金属材料和运载器总体的研制。
4) 美国国防高级研究计划局(defense advanced research projects agency,DARPA)和查尔斯·斯塔克·德雷珀实验室(Charles Stark Draper labatory,CSDL): 已建成 2个可用作试验平台的AUV,其长10.97 m,直径 1.112 m,重 6 804 kg,最大工作深度分别为304.48 m和457.2 m。该航行器采用8.82 kW的无刷电机,最大航速为10 kn,续航力为24 h,均已完成海试。
5) 美国海军研究生院(naval postgraduate school,NPS)智能水下运载器研究中心: 主要从事用于UUV智能控制、规划与导航、目标探测与识别等技术的研究,产品有 NPS AUV I、NPS AUV II、ARIES(白羊座)号、Pheonix(凤凰)号AUV等。
6) 美国伍兹霍尔海洋研究所(Woods Hole oceanographic institute,WHOI): 研制有远距离环境监测装置(remote environmental monitoring units,REMUS)及深海探测器(autonomous benthic explorer,ABE) AUV等产品。其中ABE AUV用于深海海底观察,机动性好,能完全在水中悬停,或以极低的速度进行定位、地形勘测和自动回坞。该AUV长2 200 mm,速度2 kn,根据电池类型,续航力为12.87~193.08 km,动力采用铅酸电池、碱性电池或锂电池。
7) 通用动力公司和雷声公司: 主要产品XP-21是一型直径533 mm的AUV,采用模块化设计,长度可在 2.44~7.32 m 任意选择,其标准型的质量为635 kg,航速 0~5 kn,工作深度为 9.14~3 653.63 m,主要用于水雷战。该 AUV侧视声呐为双频、单波束、数字式声呐,频率范围100~500 kHz; 高频用于探测大型水雷,低频用于探测沉底雷并对其进行分类。前视声呐为多波束数字式声呐,可填补侧视声呐的探测盲区,以探测和分类沉底雷和锚雷,同时也可用于避障。
8) 佩里技术公司: 该公司研制的机动系统试验(MUST)AUV长为9.144 m,重8 834.8 kg,工作深度为60.96 m,主要供试验和演示用。该AUV采用7.35 kW 主推进电机,电源为铅酸悬挂式电解电池组,航速为0~8 kn。推进系统采用6个推进器,使航行器可作悬停、垂直或横向运动。
9) 麻省理工学院的 Sea Grant′s AUV 实验室:是一家主导海上水下机器人的高级研发者,主要从事各种梯度海洋、环境、温度及水下能源的研究,培养了许多从事海洋高技术探索的研究生和科学家。
3 主要装备及应用
目前一般将 UUV分为便携式、轻型、重型和大型4个级别,作战使命及特征分别如下。
1) 大型 UUV: 排水量>2 000 kg; 主要用于反水雷、察打一体及特种作战; 可进行水下搜救、水下补给维修、清扫航道及破坏水下工程设施等;通过水声模拟、干扰和压制装置对来袭目标进行诱骗干扰; 通过携带各种作战功能集成模块载荷、蛙人输送舱段实施各种特种作战及运送负载。
2) 重型UUV: 排水量300~2 000 kg; 用于反水雷、察打一体、搜探、跟踪、拦截及布雷; 可通过水声模拟、干扰和压制装置对来袭目标进行诱骗干扰; 可携带轻型水下武器(鱼雷、导弹、水雷、深水炸弹)在重要港口基地航道对潜艇跟踪并实施拦截、在作战区域进行布雷等。
3) 轻型UUV: 排水量为50~300 kg; 用于反水雷、搜探、海洋调查及战场保护; 可通过携带侧扫声呐、合成孔径声呐、Boss声呐、前视声呐及高清水下摄像机/照相机等设备对作战海域的水雷进行灭雷; 可通过携带的海洋测量设备对战场进行调查; 可通过各种通信、导航及定位设备对水下航行器或武器进行精确定位,并进行实时通信。
4) 便携型 UUV: 排水量<50 kg; 用于反水雷、海洋调查及战场保护; 可通过携带浅水探测设备(探测声呐、成像声呐、水下电视机)、识别设备(水下结构物)和水下检查设备,对港口、水下设施和舰船外壳进行检查,防止蛙人潜入,起到水下保护作用; 可利用光电探测设备及雷达、通信等电子信号侦察等设备对水下物体进行侦察并识别; 具有与轻型UUV相同的灭雷、精确定位和实时通信功能。
目前,美国、俄罗斯、挪威及瑞典等国已有多型军用 UUV交付部队。其中,有 2型便携型UUV用于反水雷; 轻型UUV中,有4型用于反水雷,1型用于海洋调查; 重型UUV中,有3型用于反水雷,2型用于失事潜艇搜索,1型用于海底地图绘制; 大型 UUV中,有 1型用于反水雷,1型用于侦察、反水雷和通信。另有10多型UUV正处于探索和研发中,其中: 轻型UUV中,1型用于反水雷,1型用于海洋环境调查; 重型 UUV中,有4型用于反水雷,1型用于情报侦察,1型用于海洋环境调查; 大型 UUV中,有多型用于执行反水雷和察打一体任务。
主要海军国家典型 UUV装备体系及主要技术指标分别见图3和表1。
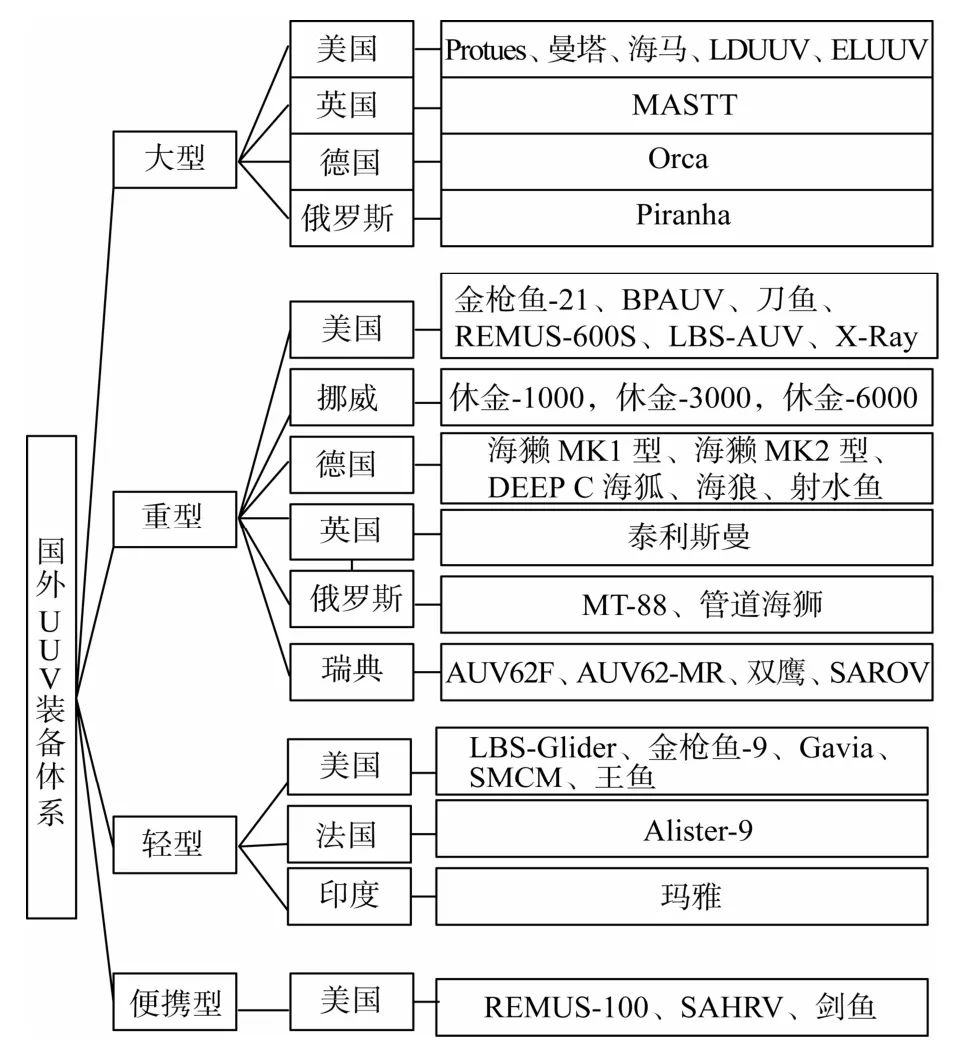
图3 国外UUV装备体系及典型代表
Fig. 3 Equipment systems and typical types of the UUV abroad
3.1 美国
美国有多型在研在役 UUV,覆盖各种排水量和动力类型。其中,便携型UUV 2型,均在役,全部用于反水雷; 轻型UUV中,4型用于反水雷,1型用于海洋环境调查,均在役; 重型 UUV中,在役3型,在研多型,且多型用于反水雷,1型用于情报侦察,1型用于海洋环境调查; 大型 UUV中,目前多型在研,近期即将服役的是LDUUV[7],其余皆处在论证与研发阶段。上述多型UUV中,仅1型为滑翔式,其余均为电动力推进型。
美国研发的UUV在动力(比能210 Wh/kg)、自主化水平(等级达6级)、导航精度(航程×0.1%)及水声通信(10~20 km范围内速率达330 b/s)等关键技术领域均处于世界领先地位。其服役的典型型号有SAHRV(便携型)、SMCM增量2(轻型) 和BPAUV(battlespace preparation AUV)(重型)等。SAHRV是REMUS-100的军用版,在原版基础上更换了声呐等任务模块,已装备“奥斯汀”级两栖船坞运输舰,并同时向英国、比利时、德国、荷兰、新西兰和新加坡等国出售,是目前销售数量最多、应用范围最广的反水雷UUV[8]。
表1 国外主要UUV技术指标一览表
Table 1 Main technical specifications of the UUV abroad
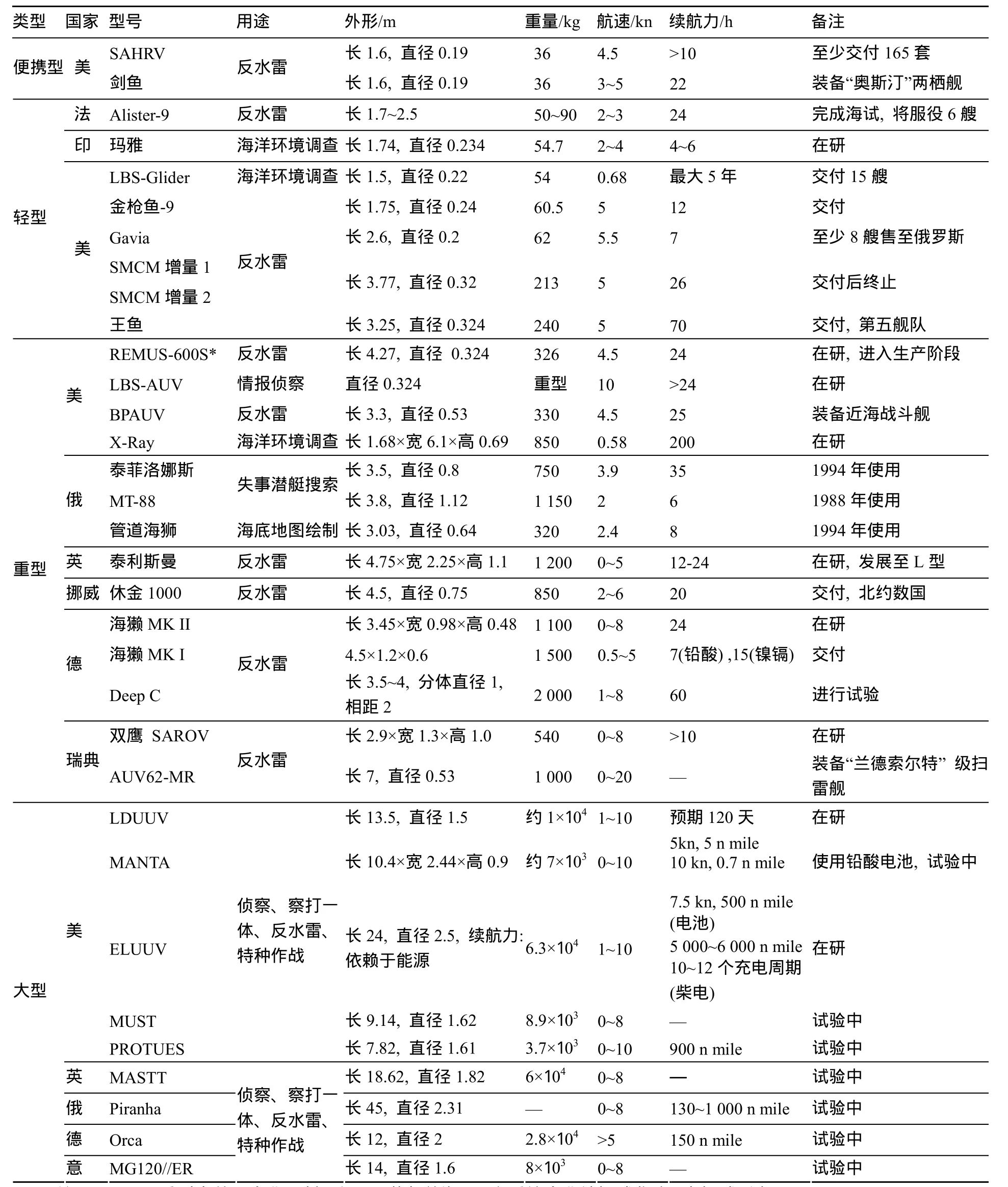
注: *REMUS系列由美国企业研制,产品已装备美海军,之后该企业被挪威收购,为挪威所有。
SMCM增量2型是在民用UUV“金枪鱼-12”的基础上发展而成,可由水面舰艇上的A型吊架布放和回收,原计划用于反水雷。由于发展重点调整,美国已停止该UUV的进一步研发,转而发展重型的SMCM增量3型UUV[9]。
BPAUV 是在民用 UUV“金枪鱼-21”的基础上发展而来,曾多次参加美国舰队的作战演习及海上试验,目前已装备近海战斗舰,主要用于反水雷[10]。
此外,美国 WHOI的 ABE AUV最大潜深达6 000 m,最大速度2 kn,巡航速度1 kn,考察距离≥30 km,考察时间≥50 h,可在没有母船支持下,长时间执行海底科考任务,它是对载人水下航行器和ROV的补充,以构成科学的深海考察综合体系,为载人水下航行器提供考察目的地的详细信息。
由美国Hydroid公司生产的REMUS是先进的UUV系列产品。其中REMUS 6000工作深度25~6 000 m,高度模块化,代表了UUV的最高水平。
3.2 欧洲
欧洲主要有挪威、英国、法国、德国及瑞典等国在研制UUV,并在锂离子电池、导航等关键技术领域与美国水平相当或接近。
挪威原有“休金”系列UUV,收购美国海德罗伊德公司后,先后研制出包括“休金”系列 3型、REMUS系列3型、Seaglider滑翔式 UUV 等多款成熟产品,型号数量仅次于美国。
法国拥有“阿里斯特(Alister)”系列 UUV,其中“Alister-9”为军用 UUV。该 UUV于 2013年 7月开始海试,已有 6艘先后服役,服役后其名称变更为“Alister-100s” [11]。
德国有 3型军用 UUV,分别是“海獭” MK I 、MK II型和DeepC,前者由丹麦早期的“马瑞丹-600”型民用 UUV 升级而来,有试验性质,已交付使用; “海獭” MK II是德国最先进的UUV,采用模块化设计,目前尚处于在研阶段; DeepC已交付德国海军用于试验。这3款UUV均可用于反水雷,DeepC还可执行侦察、通信任务[11]。
瑞典拥有2型UUV,分别是“双鹰 SAROV”和“AUV 62 MR”。前者能在遥控与自主间切换使用,尚处于试验状态; 后者主要装备于潜艇,已获多个订单,可用于反水雷及反潜战训练诱饵。
3.3 俄罗斯
俄罗斯对UUV的研究始于20世纪60年代末期,先后研制了 MT-88(1988年)、“管道海狮”(1994年)等,主要用于深海水下搜索或海图绘制。20世纪90年代之后,由于经济原因,停止了相关研发,直到2012年8月,才重新宣布为水下特种作战研发UUV[12]。
3.4 日本
日本自研 UUV主要用于石油勘探、深海打捞等民用领域,技术水平与欧美相当,但没有自研军用UUV,其海上自卫队使用的UUV多外购美国,典型型号包括REMUS-600和Gavia。此外,日本的R2D4水下机器人长4.4 m,宽1.08 m,高0.81 m,重1.506 kg,最大潜深4 000 m,能自主收集数据,可用于探测喷涌热水的海底火山、沉船、海底矿产资源和生物等[5]。
3.5 韩国和印度
韩国的 UUV主要用于深海探测,典型民用型号为OKPO-6000,尚无军用 UUV服役。印度军用 UUV尚处于实验室开发阶段,主要在研产品为“玛雅”[5]。
4 技术现状
能源、自主控制、导航、通信及任务载荷是UUV最关键的5个系统(见图4),能源是心脏,自主控制是大脑,导航和通信是感官,任务载荷是作业工具。
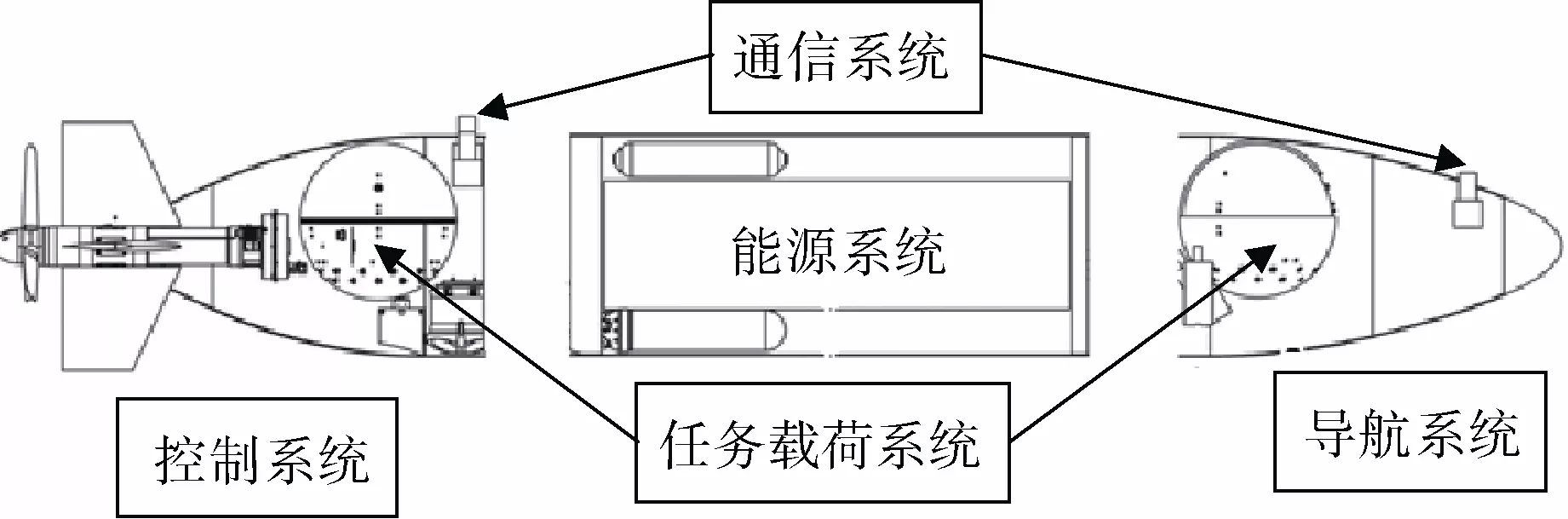
图4 UUV组成示意图
Fig. 4 Composition of an UUV
4.1 能源技术
由于工作环境特殊,UUV的能源应满足比能量高、能量密度大、安全性好、可靠性高、易控制、价格低廉、耐低温、耐高压、耐腐蚀且环境污染小(无环境污染)等条件。电池具有结构简单、可承压、无振动与噪声、可靠性高、工作温度范围宽、使用成本低等优点,是绝大部分电力推进型军用UUV的能源。UUV常用的电池主要有铅酸电池、镍镉电池、银锌电池和锂/锂离子电池系列以及燃料电池(见表2)。铅酸电池、镍镉电池和银锌电池主要用于国外早期UUV,前两者因比能量和能量密度低,后者因寿命短,已被锂/锂离子电池取代。
表2 UUV各类电池性能对比
Table 2 Comparison among performance of different batteries for an UUV


锂/锂离子电池中的二次电池的比能量和能量密度分别达到铅酸电池和镍镉电池的4倍和2倍以上,寿命是银锌电池的 130倍,已成为目前国外应用的主流,美国的REMUS系列及挪威“休金I”型UUV均采用二次锂离子电池,比能量最高达到210 Wh/kg。
燃料电池仅在少数商用 UUV或实验平台使用,新型燃料电池多处于实验室开发阶段,在用的质子交换膜和铝氧燃料电池比能量达 400 Wh/kg,在研的固态氧化物和锂/过氧化氢燃料电池比能量分别达500 Wh/kg和725 Wh/kg[13-14]。
锂离子电池未来仍将大量应用在便携型、轻型及重型 UUV上,重点改进正负极活性材料的电化学比容量,以提高能量密度。2020年后,燃料电池技术将成熟并广泛装备在军用巨型 UUV平台上,未来将重点突破燃油重整器和高功率密度技术。据报道,美国正在开发比能量500 Wh/kg的燃油重整固态氧化物燃料电池[15]。
4.2 自主控制技术
UUV的自主控制涉及诸多方面,包括综合运用智能体系结构、轨迹规划与避障、运动控制算法等技术,它们决定了 UUV如何处理获取的数据、如何模拟思考和行动过程。先进的UUV能在预定路径上进行一定程度的自主判断,如避障、迂回及路径优化等,紧急时还能利用水声通信对 UUV进行干预,自主控制技术等级达到6级(见表3)。
表3 UUV自主控制技术对比
Table 3 Comparison among autonomous control technologies of an UUV
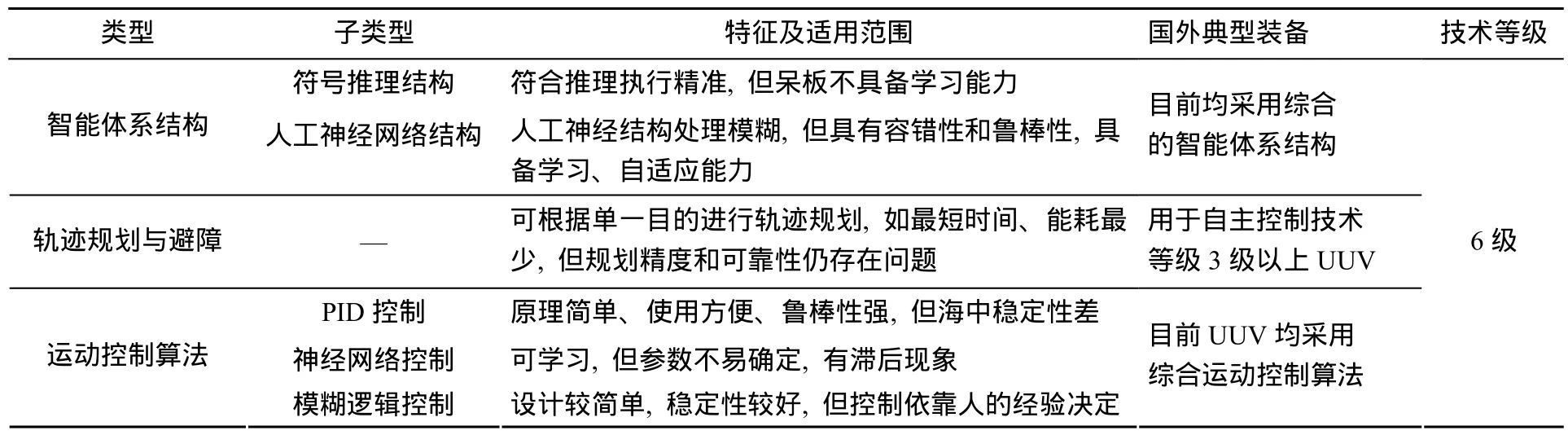
自主控制技术未来的发展方向是进一步优化逻辑算法、路径优化方法。根据目前美国在研潜载大型UUV的自主性描述,2017年将可以探测、定位和识别水面船只并判断其意图、探测和避开各种渔网和渔具,同时发展协同能力和自主控制技术等级提高到8级。到2030年,将向9级过渡。
4.3 导航技术
UUV的导航系统受大小、重量、电源使用的限制及水介质的特殊性、隐蔽性等因素影响,实现精确导航难度较大。现有产品多综合使用惯性导航、卫星导航、多普勒计程仪及声学导航等技术,其性能对比见表4。
表4 UUV常用导航系统性能对比表
Table 4 Comparison of commonly used Navigation system for an UUV
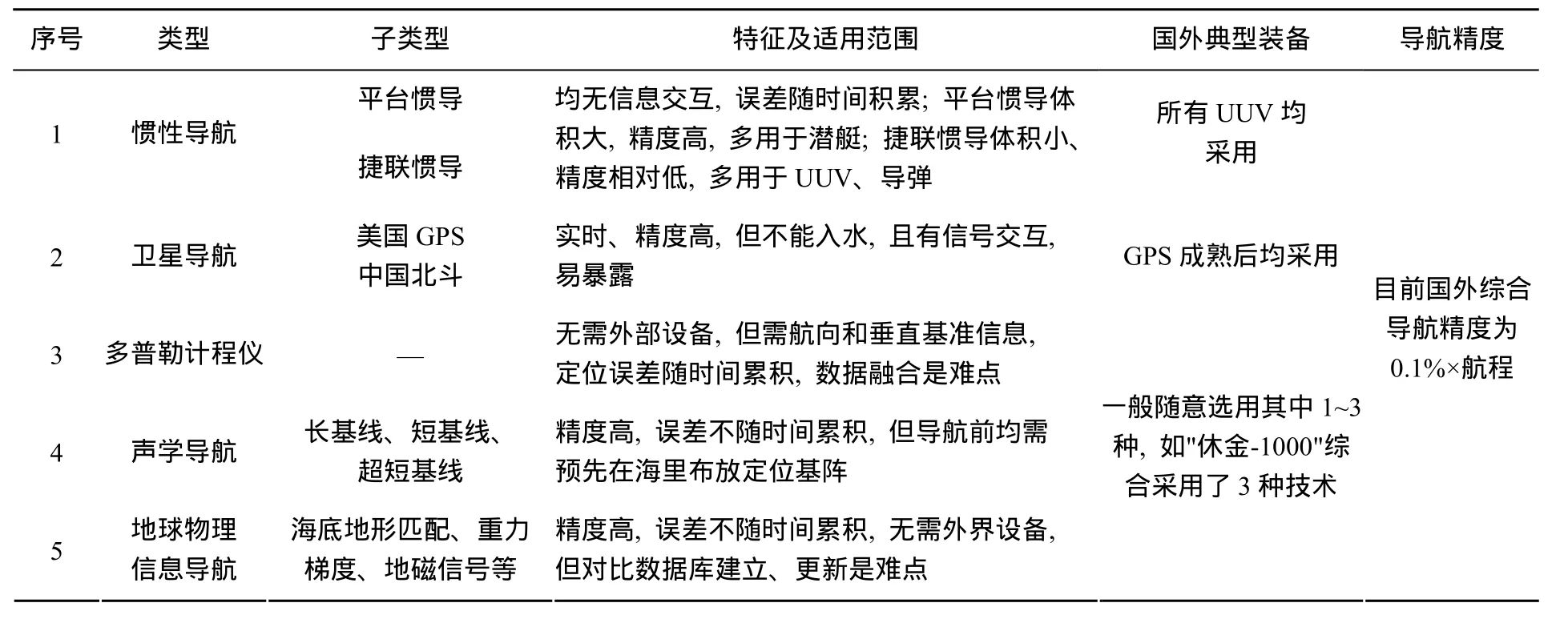
常用导航技术中,惯性导航针对UUV体积小,携带能量有限的特点,具有低功耗、低成本、体积小、坚固且可靠性高等优点的光纤陀螺捷联惯导系统是发展的热点; 卫星导航是 UUV在水面或接近水面航行时的主要辅助导航方式(如美国的GPS、中国的北斗系统),常用于校准惯性导航系统长时间累积的误差。目前几乎所有的 UUV均装备了GPS接收机,该系统发展重点与技术难点是GPS接收机的抗干扰问题; 多普勒计程仪发展的重点与难点是与惯性导航系统的数据融合;声学导航技术主要有长基线导航、短基线导航和超短基线导航3种; 地球物理信息导航将实时测量的重力梯度、地磁、海底地形地貌等信息与平时测量掌握值之间进行匹配,从而获得导航信息。
美国在 UUV导航技术方面处于世界领先地位,其BPAUV的导航系统包括LN250惯性导航系统、多普勒计程仪及GPS接收机,导航精度为航程的 0.1%[10]。挪威最先进的“休金-1000”UUV导航系统包括惯性导航系统、多普勒计程仪、超短基线水下定位系统、GPS接收机等,并将地形匹配导航作为可选方案,其自主工作模式下实时导航精度接近美国水平[11]。
未来 UUV导航系统将通过研发新的惯性传感器、积累更多的地球物理数据等手段,不断追求导航系统的高精度、小型化、低成本,并向不依赖GPS的方向发展,根据美国UUV发展规划,将重点发展海底地形匹配技术,未来的目标是将综合导航精度提高2个量级。
4.4 通信技术
UUV在执行任务时,相互间、与母艇(舰)以及支援平台间需要传输大量的指令和数据,对通信能力提出了较高要求。目前用于 UUV的通信技术主要有水声通信和无线电通信,见表 5。其中: 无线电通信是 UUV在水面采用的主要方式;水声通信是 UUV在很长时间内都将采用的水下通信方式,目前该技术发展已较为成熟,国外很多机构都已研制出小型化的水声通信调制解调器,并在UUV上使用。如美国“金枪鱼”和RUMUS系列 UUV均采用伍兹·霍尔海洋研究所研制的低功耗水声通信系统,传输速率为80~5 400 b/s[16]。
表5 UUV各类通信技术对比表
Table 5 Comparison of communication technologies for an UUV
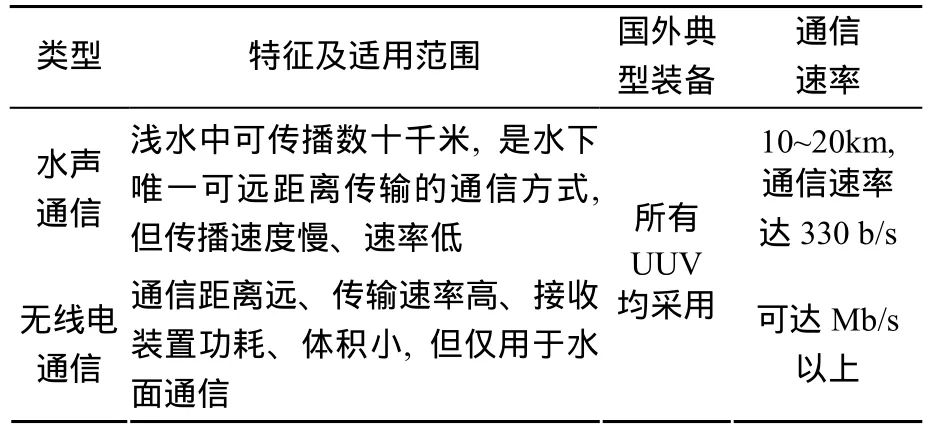
UUV水声通信技术发展方向是提高通信距离和通信速率,发展网络通信能力。由于水声通信存在传播速度低、可用频宽窄、信号衰减严重等缺点,各国均在研究相关技术以求得到改善。典型技术方向包括水声信道编码技术(增加信道容量,提高传输速率)、自适应均衡技术(提高抗干扰能力)以及时反通信技术(减少功耗、提高传输距离)。此外,现在水声通信技术已发展到网络化阶段,将网络技术(Ad Hoc)应用到水声通信网络中,可以在海洋里实现全方位、立体化通信(可以实现无人航行器组网),但目前只有少数国家试验成功(美国已于2016年9月成功进行了无人航行器移动组网的试验)[3]。
4.5 任务负载技术
UUV的任务负载系统主要是针对不同使命任务而配备的水声、电子或光学设备,其中声呐设备是UUV的关键负载,对精度、重量和体积有很高要求。国外合成孔径声呐成熟产品最大扫海效率为2.88 km2/h,成像分辨率5 cm2,3 kn时探测距离260 m[5]。该产品材料制备工艺先进,能制备出大面积的压电陶瓷材料,切割质量稳定,切割后阵元一致性好,成品体积重量小。未来合成孔径声呐的发展方向是利用光纤水听器等技术,提高作用距离、降低自重。
5 发展规划及展望
5.1 发展规划
1994年,美国正式将UUV研发列入美海军发展计划,提出优先发展 UUV的水雷侦察、情报监视侦察和海洋调查能力[1]。2000年,发布第1版《美海军UUV总体规划》,确定了无人航行器的7项任务: 情报监视侦察、反水雷、海洋调查、通信导航、反潜战、武器平台、后勤补给与支援。2004年,发布第 2版《美海军 UUV总体规划》[17],将UUV的任务最终调整为9项,包括情报监视侦察、反水雷、反潜战、探察与识别、海洋调查、通信/导航节点、设备运送、信息作战和时敏打击,并依据直径、排水量、续航力及有效载荷等指标将UUV划分为便携式、轻型、重型和大型等4类[17]。此后,为建立地面、水下、空中统一的无人系统整体发展战略规划,美国未再单独针对 UUV 发布规划,并于2007~2013年间,陆续发布了4版《无人系统(一体化)路线图》[18-21]。这一阶段,针对UUV的研发重点在于加大对UUV作战概念和使用方法的探索,提出了利用UUV组建水下侦察预警网络、为UUV配备武器和传感器使其成为察打一体系统等概念,以进一步牵引UUV的发展。
EDA于2010年发布了《海上无人系统方法与协调路线图》[22],提出协调各国力量,共同促进无人航行器等无人系统发展,重点突破传感器、平台、通信、指控、自主控制以及反水雷等关键技术; 采用按需并量力而为的策略,根据参与国需求和能力设定关键技术发展次序。目前已启动部分项目,如2011年11月,EDA授予挪威、意大利、德国等价值 475万欧元的合同,为海上无人系统开发共形阵列性能评估模型,为共形声呐阵提供开发软硬件工具[23]。
5.2 展望
综合分析国外 UUV发展现状,未来的发展重点集中在以下几方面。
1) 向网络化、协同化和集群化发展。UUV尺寸小、航速低,单位时间机动范围小,探测和水声通信距离短,单 UUV的作战和作业范围非常有限。多 UUV组成一体化侦察、探测、打击网络,协同作战和作业,是提高其作战能力和作业效率的有效手段,也是UUV的必然发展趋势。目前,使用多UUV协同探雷、探潜、测量海洋环境参数和探测水下目标等已经成为研究的热点。美国和北约国家正在开展相关理论研究和海上试验研究,重点为多UUV的协同控制、协同导航和定位、网络化通信技术、协同作战和作业策略等。水下无人集群化作战(业)的各项研究课题已成为研究重点,美国正在验证蜂群和蚁群的作战模型,当前水下无人集群作战(业)的数量已达 101个。随着智能化深度自学习的进一步深入,各种实战模拟编队算法不断完善,以便携型及轻型为主的微小型UUV群作战(业)模式将是未来发展方向。
2) 建设集群移动式 UUV+固定式水下装备信息体系,发挥水下预警探测能力。水下预警探测装备体系效能的发挥,除了基于大量布放于海底的水下传感器对自水下的威胁目标和武器进行早期发现、跟踪外,更重要的是能够对水下目标进行快速识别,为组织对抗行动提供依据。因此,为了保障水下预警探测体系的高效运转,还必须充分对各种UUV游弋水下获取的目标信息进行处理和应用,分析挖掘出有价值的信息资源,重点建设全球型的水下信息体系,实现从空中-海面-水下多维空间的全天侯监听、采集、记录、保存和分析所能得到的各种水声信息,以构建集群分布移动式UUV+固定式水下信息装备体系水声信息体系网。
3) 任务领域向探测、反潜方向扩展。UUV目标小、隐蔽性强、可连续工作的特点非常适合执行探测和攻击舰艇、潜艇等任务,在较长时间里,由于动力、自主及通信等技术的限制,只能用于海洋调查、反水雷这类相对简单的任务。随着续航力、自主化、智能化程度的提高和水下通信能力的进步,UUV逐渐具备了执行更复杂任务的能力。近年来,国内外都在积极研究UUV在联合反潜、网络化水下探测预警等领域的应用。
2011年,美国国防高级研究计划局提出分布式敏捷反潜概念,在深海利用多艘配备主动声呐的 UUV对上方海域进行监测,及时发现所在海域内的潜艇,见图 5。2013年 4月的试验表明,UUV的通信和机动探潜能力能够满足分布式敏捷反潜概念的需要,证明概念可行,美国将加速推进有关概念的实现[5]。
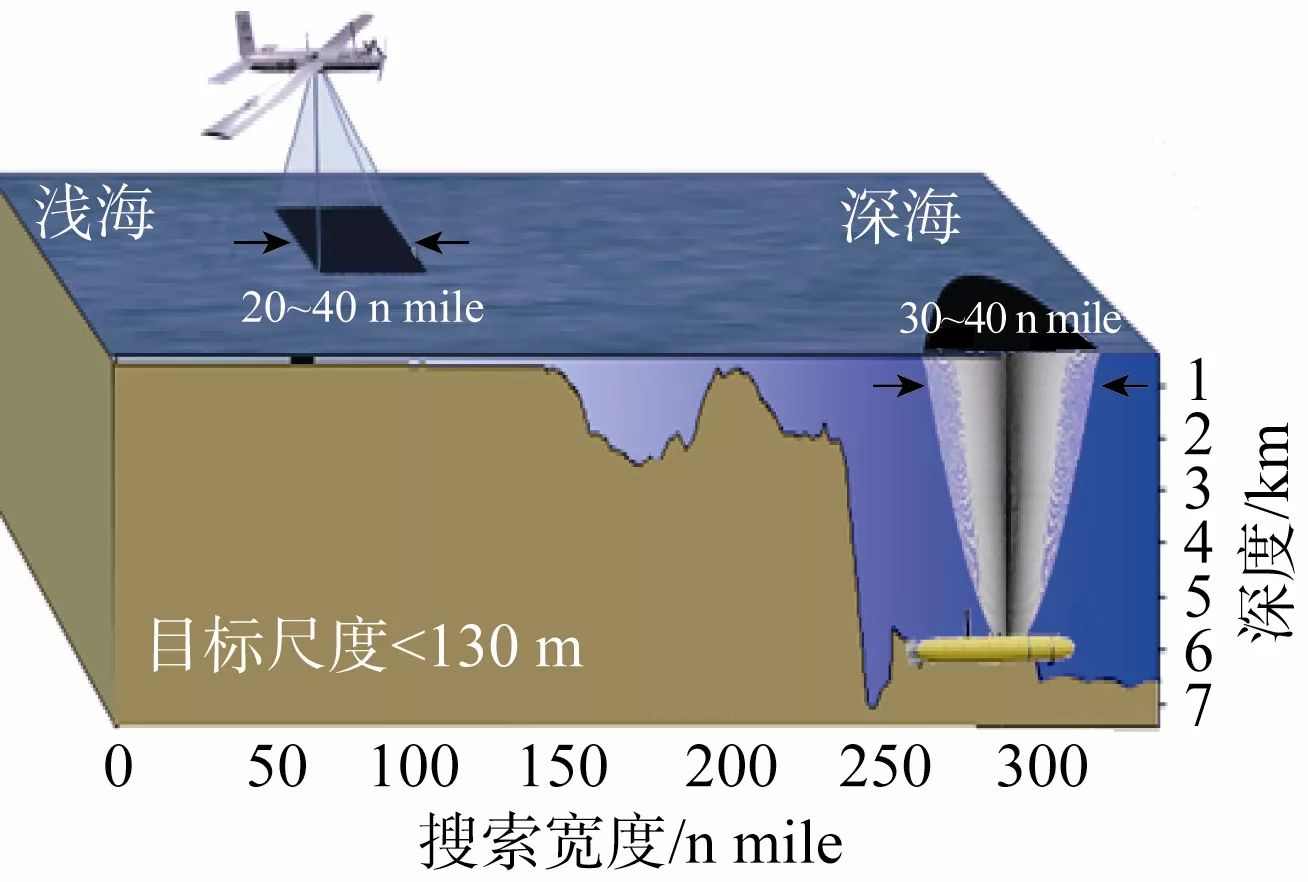
图5 分布式敏捷反潜项目作战示意图
Fig. 5 Operational schematic of distributed agile submarine hunting(DASH) project
4) 灵活轻便和大型多功能并举。在潜载UUV方面,为了提高单 UUV设备的任务能力,增大 UUV的航程,美国在经历了单任务潜载UUV、多任务小型潜载 UUV的失败后决定发展大直径多功能UUV,该UUV属于大型UUV,是未来潜载UUV的发展方向。
在舰载 UUV方面,主要集中发展便携式和重型 2类。以美国为例,典型型号为 REMUS 100S、斯洛克姆滑翔机、金枪鱼-21和 REMUS 600S,前两者属于便携式UUV,已处于服役状态,后两者属于重型UUV,尚在试验阶段。美国曾对轻型UUV进行过研发,如水面反水雷UUV增量1和增量2,但已被重型UUV所取代。
另外,美国还在积极探索大型或超大型UUV的实战可能性,以取代潜艇的有人作战模式,以大型 UUV作为预置水下武器库装备长期潜伏在海底,或长时间在重要海域无人值守,同时携带大量微小型 UUV在作战前沿,形成以大型或超大型UUV为母基地的区域水下群作战。
5) 尽量采用成熟商用技术,用集成化的方式,把专业领域先进技术制成模块化专用装置,以适应作战平台上根据特殊要求所需的各种功能模块的定制。
6) 变革通信方式,创新通信能力建设。水下通信技术是 UUV系统与平台之间信息互交的关键。目前,UUV水下通信主要采用声学通信系统、光纤电缆等,未来可大力发展多维平台间高品质的光-声通信,在数据被传送之前,首先进行预处理,压缩数据以减少传送的数据总量,提高声通信的数据传输率,降低误码率。当UUV在经过某个节点通信基阵点时,采用快速通信可大大提高传输率,当 UUV上浮水面进行充电时可与水面通信局域网、GPS等进行数据交换,从而实现5D一体的通信方式。
7) 发展独立的组合导航系统。在UUV上要建立惯性导航、地磁匹配导航、地形匹配导航、多普勒导航等独立组合导航系统。因航行器搭载的传感器存在固有误差,惯性导航系统实际上不能完全满足所有 UUV的导航要求,但通过建立GPS接收机来提供理想的精确定位修正值,则需要航行器浮至水面进行定位校正,这样易暴露UUV的行踪,同时减少了UUV执行任务的时间。因此,未来的 UUV必须发展自己的独立导航系统,减少对外界的依赖(如 GPS)。目前美海军水下战中心开始发展非传统性导航技术(non-traditional navigation,NTN),包括利用海底地形匹配、地形跟踪及引力导航,如深海测量地形匹配技术,就是采用了GPS和定量定位估算的形式,以形成自己真正的水下精确定位导航系统,即深海导航定位系统(positioning system for deep ocean navigation,POSYDON)。
8) 改进控制系统,提高自学习、自适应能力。现代海战要求 UUV必须能够在苛刻的水下环境(如: 浅水域、海底地形复杂、海面交通繁忙等)中完成任务。因此,未来的 UUV应具有较高的智能化水平,能够执行复杂的水下工作,并与环境发生交互作用,根据环境的变化,在一定的范围内自行调整自身的行为,完成指定的工作,成为高度智能化的深度自学习生态智能。
9) 开发从大数据中获取有用信号的处理技术。未来UUV将大幅度改进信号处理技术,通过来自于合成孔径声呐、声呐阵列、水下水文探测、目标识别所获得各种数据分析,从大数据中提取有各种特征的声学数据,以进行水下目标定位与探测,提高空间增益和图像分辨率,使从声呐获得的影像更为清晰,提高 UUV水下复杂环境下执行任务的能力。
当今,世界各军事大国都认识到 UUV在未来海战中具有广阔的应用前景,加快了开发及研制的步伐。相信在未来高科技信息化海战中UUV定将发挥巨大作用。
参考文献:
[1] 陈强,张林根. 美国军用UUV现状及发展趋势分析[J].舰船科学技术,2010,32(7): 129-134.Chen Qiang,Zhang Lin-gen. Analysis of Current Situaonal Development Trend of US Military UUV[J]. Ship Science and Technology,2010,32(7): 129-134.
[2] 许德章. 水下作业多传感器集成与信息融合研究[D].合肥: 中国科学技术大学,2005.
[3] 国外舰船装备与技术发展报告编写组. 国外舰船装备与技术发展报告 2016: 海上无人系统(无人潜航器)[G].北京: 中国船舶重工集团公司,2017.
[4] 国外舰船装备与技术发展报告编写组. 国外舰船武器装备与技术发展报告 2015: 海上无人系统(无人潜航器)[G]. 北京: 中国船舶重工集团公司,2016.
[5] 国外舰船装备与技术发展报告编写组. 国外舰船武器装备与技术发展报告 2014: 海上无人系统(无人潜航器)[G]. 北京: 中国船舶重工集团公司,2015.
[6] 国防科技信息网. 国外自主式水下航行体(AUV)研发现状比较[EB/OL]. (2009-12-18)[2017-03-01]. http:// www.dsti.net/Special/Ne-wsView/136.
[7] Large Displacement Unmanned Underwater Vehicle SteamingAhead[EB/OL].(2012-04-01)[2015-09-21].http://aviationweek.com/awindefense///lduuv/.
[8] German Navy to receive REMUS 100 AUVs from Hydroid[EB/OL].(2012-10-04)[2017-07-11].http://www.naval-technol ogy.com/projects/remus-100-automatic-underwater-vehic-les/.[9] General Dynamics Knifefish Unmanned Undersea Vehicle Successfully Completes Mine-hunting Evaluation[EB/OL].(2017-03-20)[2017-07-11].https://gdmissionsystems.com/Arti cles/2017/03/20/news-release-3-20-2017-gd-knifefish-umanned-undersea-vehicle-successfully-completes-mine-hunting-ev.
[10] Autonomous-underwater-vehicle[EB/OL].(2009-07-20)[2017-07-11]. http://en.m.wikipedia.org/wiki/Autonomous-under-water-vehicle.
[11] 钟宏伟. 武器级 UUV发展趋势及关键技术研究[R]. 北京: 中国国防科学技术报告管理办公室,2011(12).
[12] 国外舰船装备与技术发展报告编写组. 国外舰船武器装备与技术发展报告 2013: 海上无人系统(无人潜航器)[R]. 北京: 中国船舶重工集团公司,2014.
[13] Japan Creating Fuel-cell Powered Underwater Vehicle[EB/OL]. (2014-08-10)[2017-07-11]. http://fuelcellworks.com/archives/2016/08/11/japan-creating-fuel-cell-powere d-underwater-vehicle/.
[14] Japan Is Building a "UUV" Will Fuel Cell-Powered Robotic Submarines Soon Swim American Seas[EB/OL].(2014-09-14)[2017-03-01]. https://www.fool.com/ investing/general/2014/09/14/weekender-a-fuel-cell-powered-ro botic-submarine-br.aspx.
[15] Barry J,Abigail R,Kevin D. The Direct Borohydride Guel Cell for UUV Propulsion Power[J]. Jaurnal of Power Sources,2006,162(2): 765-772.
[16] AUV Communication and Performance[EB/OL]. (2014-08-14)[2017-06-01].http://www.naval-technology.com/projects/remus-100-automatic-underwater-vehicle/.
[17] Department of the Navy. The Navy Unmanned Undersea Vehicle(UUV) Master Plan[R]. U.S.: Department of the Navy,2004.
[18] United States Department of Defense. Unmanned Systems Roadmap: FY2007-2032[R]. U.S.: United States Department of Defense,2007.
[19] United States Department of Defense. Unmanned Systems Integrated Roadmap: FY2009-2034[R]. U.S.: United States Department of Defense,2009.
[20] United States Department of Defense. Unmanned Systems Integrated Roadmap: FY2011-2036[R]. U.S.: United States Department of Defense,2011.
[21] United States Department of Defense. Unmanned Systems Integrated Roadmap: FY2013-2038[R]. U.S.: United States Department of Defense,2013.
[22] 欧洲制定海上无人系统的路线图和方法论[EB/OL].(2012-01-18)[2017-06-01].http://news.xinhuanet.com/mil/2012-01/18/c_122600858.htm
[23] 世界舰船武器装备与技术发展报告编写组. 世界舰船武器装备与技术发展报告 2011: 海上无人系统(无人潜航器)[G]. 北京: 中国船舶重工集团公司,2012.
Review and Prospect of Equipment and Techniques for Unmanned Undersea Vehicle in Foreign Countries
Abstract: An unmanned undersea vehicle(UUV) has become the research hotspot of navy in many countries. This paper analyzes the development process and planning of some typical types of UUV equipment in the foreign countries,including the USA,Russia,Japan,Republic of Korea,and major European countries. According to a large amount of literature,the major research institutes for UUV development in these countries are listed,the applications and key technical parameters of the typical UUV equipment are introduced,the foreign development status of the UUV technologies of energy,autonomous control,navigation,communication,and loading is discussed,and development trend of the UUV is forecast.
Keywords: unmanned undersea vehicle(UUV); technical parameter; research institute; typical type of equipment
中图分类号: TJ630.1; TP242.6
文献标识码: A
文章编号: 2096-3920(2017)03-0215-11
[引用格式] 钟宏伟. 国外无人水下航行器装备与技术现状及展望[J]. 水下无人系统学报,2017,25(3): 215-225.
DOI: 10.11993/j.issn.2096-3920.2017.03.001
收稿日期:2017-02-22;
修回日期:2017-07-19.


长按识别图中二维码关注我们!




