
第21届智能体及多智能体系统国际会议(International Joint Conference on Autonomous Agents and Multi-Agent Systems, AAMAS-2020)近日在线举行。智能体及多智能体系统国际会议(AAMAS) 是多智能体系统领域最具影响力的会议之一,由非营利组织IFAAMAS主办。来自佐治亚理工大学Matthew Gombolay和Zheyuan Wang共同讲述了图神经网络解决多机器人协调问题的能力,非常值得关注!
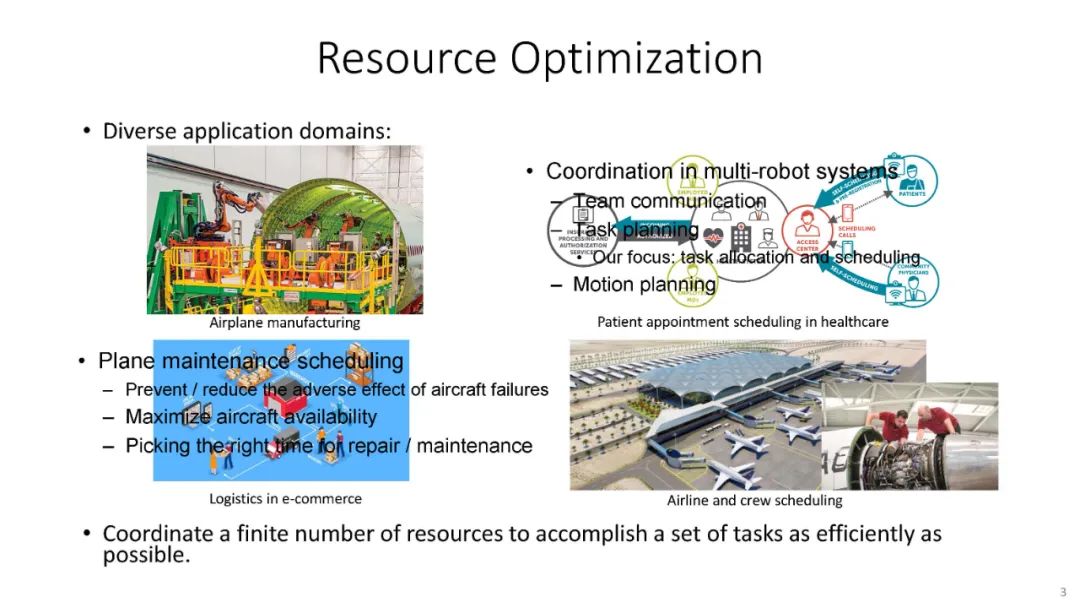
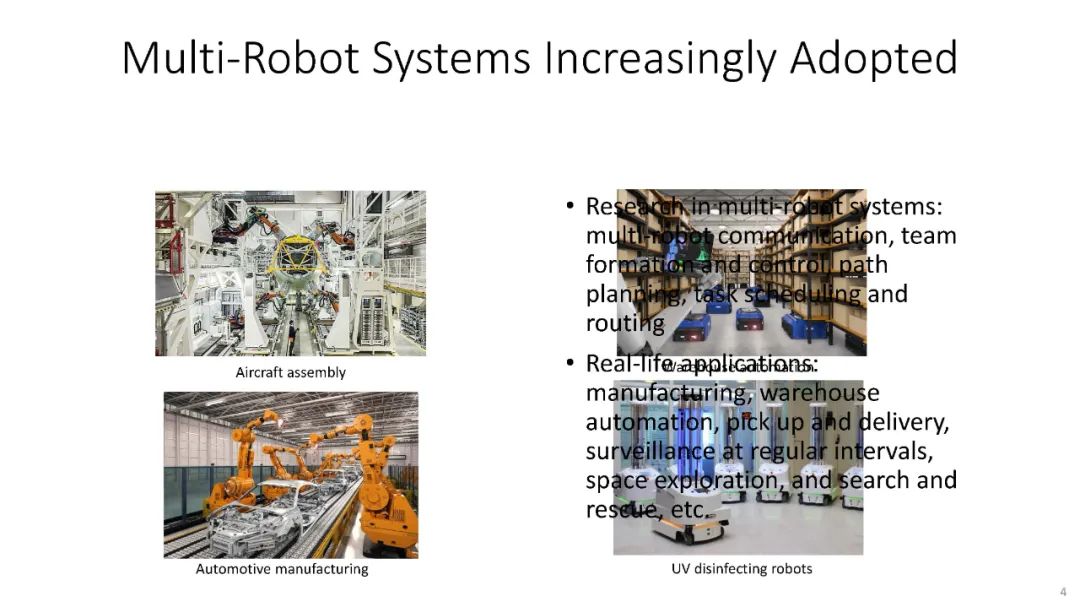
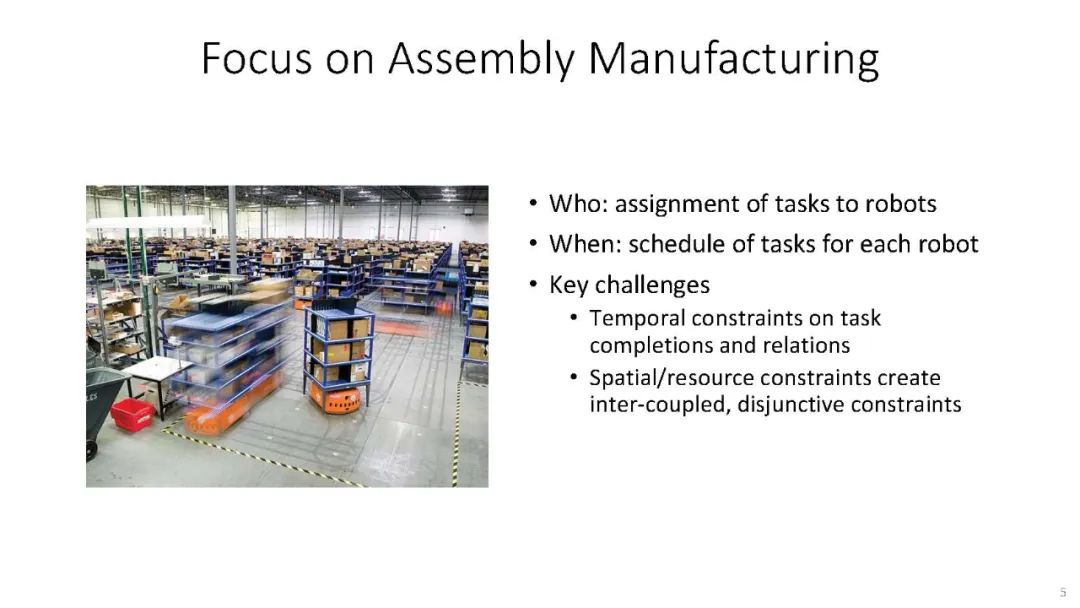
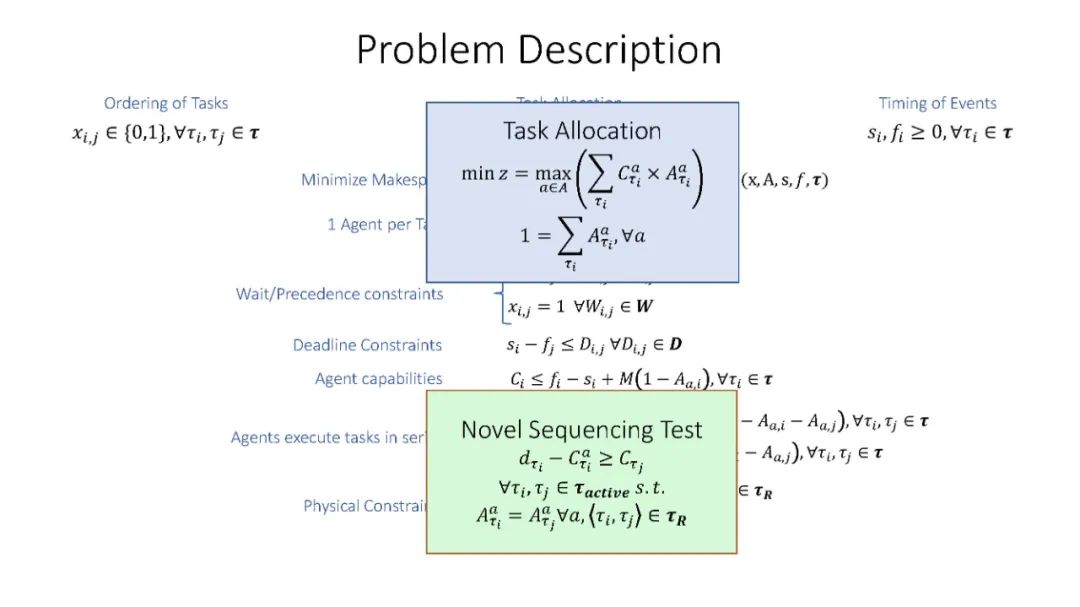
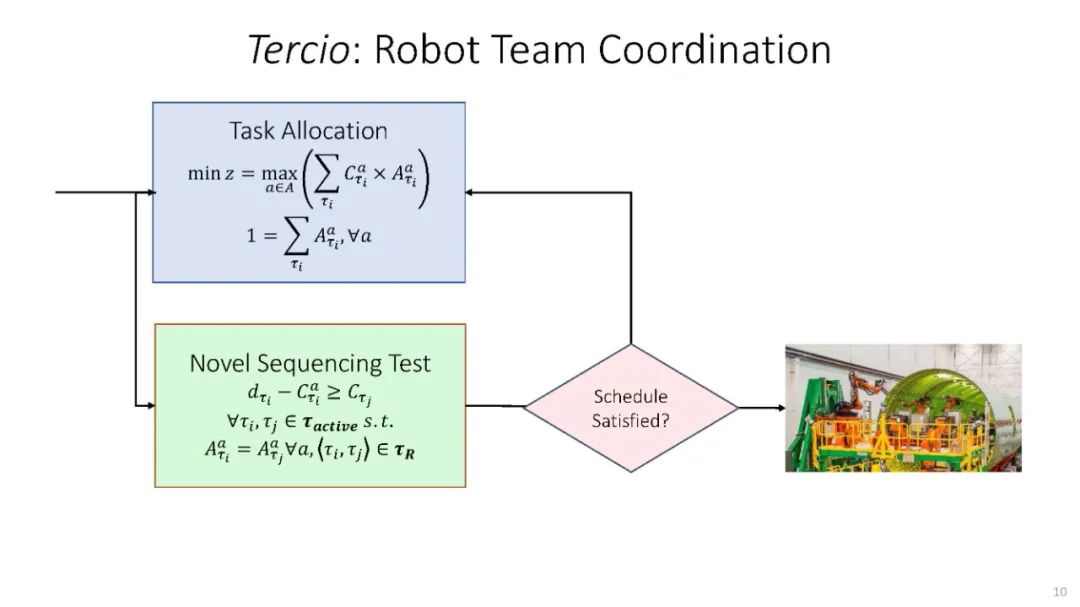
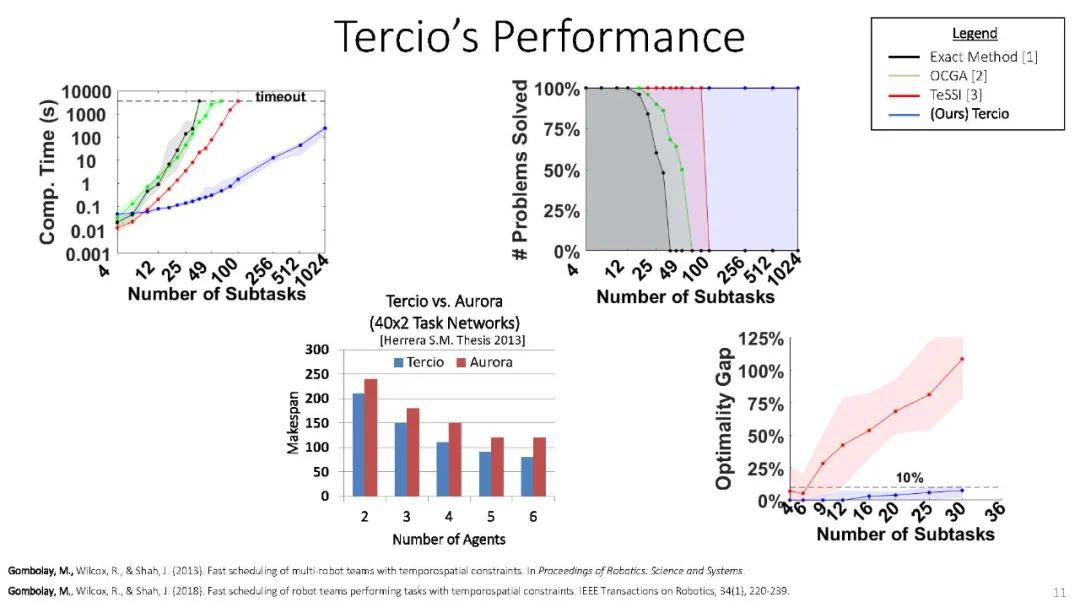
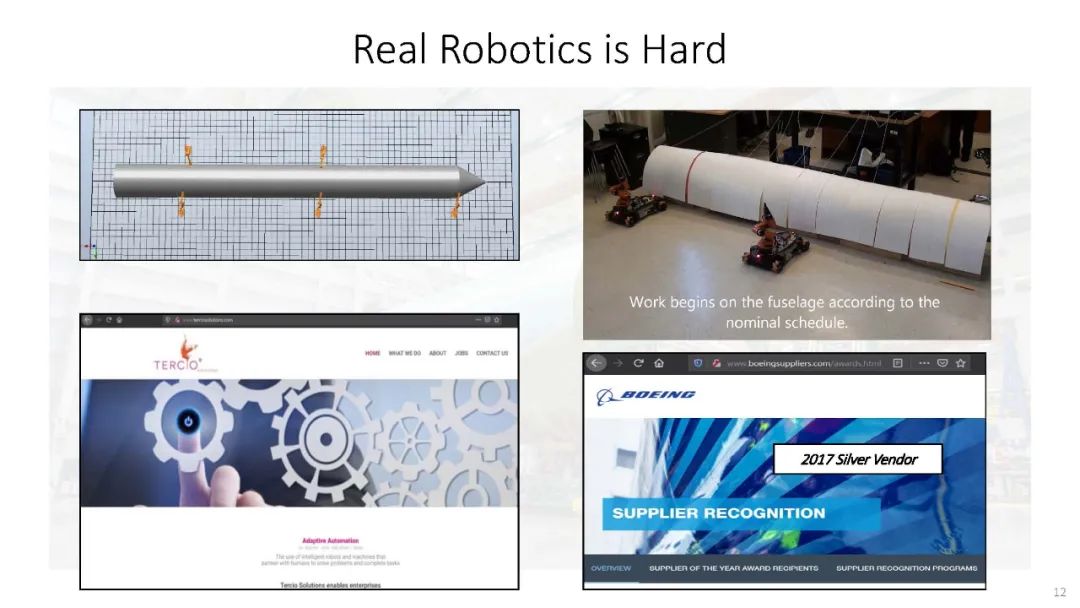
机器人队越来越多地部署在生产设施和仓库等环境中,以节省成本和提高生产率。为了有效地协调多机器人队,快速、高质量的调度算法必须满足动态任务规范、部件和机器人可用性在时间和空间上的约束。传统的解决方案包括精确的方法,这对于大规模问题是棘手的,或者特定应用的启发式,这需要专业的领域知识。迫切需要的是一种新的自动化方法,它可以自动学习轻量级的、特定于应用的协调策略,而不需要手工设计的特征。 本教程介绍了图神经网络,并展示了图神经网络解决多机器人协调问题的能力。本文综述了近年来各种图神经网络的框架,重点讨论了它们在多智能体系统建模中的应用。我们将介绍多机器人协调(MRC)问题,并回顾解决MRC问题最相关的方法。我们将讨论图神经网络在MRC问题中的几个成功应用,并以Python示例代码的形式提供实践教程。通过本教程,我们旨在提供使用图神经网络建模多机器人系统的经验,从算法开发到代码实现,从而为在更广泛的多智能体研究中设计基于图的学习算法打开未来的机会。
https://core-robotics.gatech.edu/2022/01/18/aamas2022_tutorial_gnn_robot/
第一部分将讨论以下内容: (a) 图神经网络是如何工作的——我们将全面概述以往文献中提出的各种图神经网络,包括同质图和异质图以及注意力机制; (b) 如何用图神经网络为团队协调问题建模——我们将讨论哪些应用可以用图神经网络建模,重点是MRC问题;(c)如何为团队协调问题优化图神经网络的参数-我们将讨论哪些学习方法可以用于训练基于图神经网络的求解器。我们以最常见的挑战和开放问题来结束本部分。
第二部分将提供一个实际操作教程,介绍如何使用图神经网络来解决协调问题,并在Python Jupyter笔记本中编写示例。特别地,我们将研究ScheduleNet架构[6],这是一个基于异构图神经网络的求解器,用于在时间和空间约束下解决MRC问题。Jupyter将工作通过模型实现,训练和评估的ScheduleNet模型在合成数据集。
**讲者介绍: **
Matthew Gombolay博士是佐治亚理工学院交互计算专业的助理教授。他于2011年获得约翰霍普金斯大学(the Johns Hopkins University)机械工程学士学位,2013年获得麻省理工学院(MIT)航空航天学硕士学位,2017年获得麻省理工学院(MIT)自主系统博士学位。Gombolay的研究兴趣涵盖机器人、人工智能/ML、人机交互和运行学。在答辩论文和加入乔治亚理工学院之间,Gombolay博士曾在麻省理工学院林肯实验室(MIT Lincoln Laboratory)担任技术人员,并将他的研究工作转化到美国海军,为他赢得了R&D 100奖。他的发表记录包括美国航空航天学会的最佳论文奖,美国控制会议的最佳学生论文决赛,以及机器人学习会议的最佳论文决赛。2018年,Gombolay博士被选为DARPA Riser ,获得了国家消防研讨会的早期职业奖第一名,并因提高太空科学自主性而获得了NASA的早期职业奖学金。
https://core-robotics.gatech.edu/people/matthew-gombolay/
Zheyuan Wang,佐治亚理工学院电气与计算机工程学院博士研究生。他在上海交通大学(Shanghai Jiao Tong University)获得电气工程学士学位和硕士学位。他还获得了佐治亚理工学院ECE的硕士学位。他目前是由Matthew Gombolay教授领导的认知优化和关系(CORE)机器人实验室的研究生研究助理。他目前的研究方向是基于图的策略学习,利用图神经网络进行表示学习和强化学习进行决策,应用于人-机器人团队协作、多智能体强化学习和随机资源优化。
https://phejohnwang.github.io/
内容概览

参考文献:
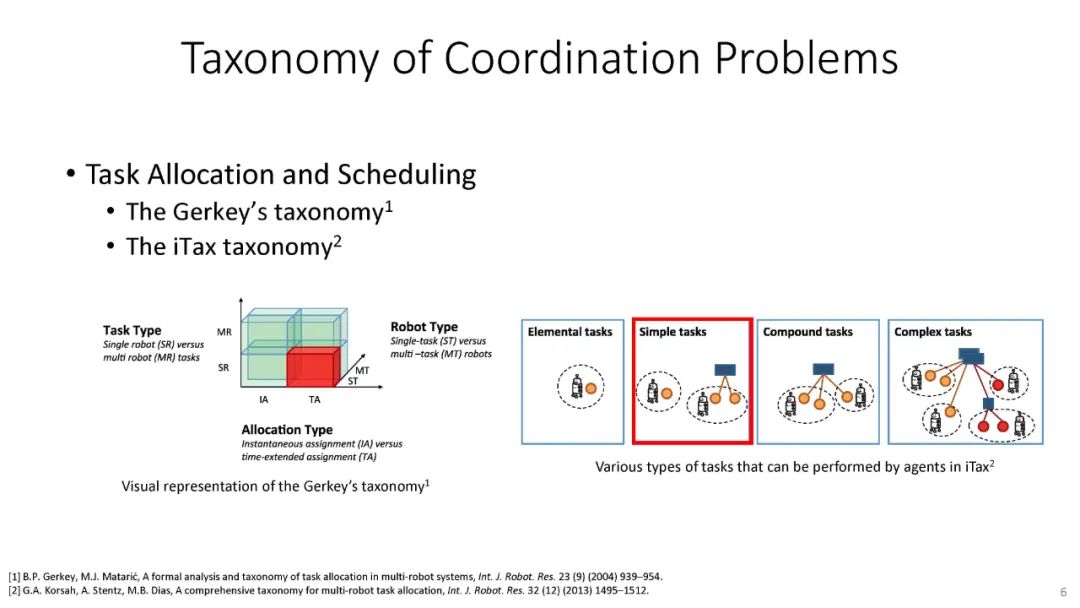
Ernesto Nunes, Marie Manner, Hakim Mitiche, and Maria Gini. 2017. A taxonomy for task allocation problems with temporal and ordering constraints. Robotics and Autonomous Systems 90 (2017), 55–70. 1. Petar Veličković, Guillem Cucurull, Arantxa Casanova, Adriana Romero, Pietro Liò, and Yoshua Bengio. 2018. Graph attention networks. International Conference on Learning Representations (2018). 1. Xiao Wang, Houye Ji, Chuan Shi, Bai Wang, Yanfang Ye, Peng Cui, and Philip S Yu. 2019. Heterogeneous graph attention network. The World Wide Web Conference (2019), 2022–2032. 1. Jie Zhou, Ganqu Cui, Shengding Hu, Zhengyan Zhang, Cheng Yang, Zhiyuan Liu, Lifeng Wang, Changcheng Li, and Maosong Sun. 2020. Graph neural networks: A review of methods and applications. AI Open 1 (2020), 57-81. 1. Zheyuan Wang and Matthew Gombolay. 2020. Learning scheduling policies for multi-robot coordination with graph attention networks. IEEE Robotics and Automation Letters 5, 3 (2020), 4509–4516. 1. Zheyuan Wang, Chen Liu, and Matthew Gombolay. 2021. Heterogeneous graph attention networks for scalable multi-robot scheduling with temporospatial constraints. Autonomous Robots (2021), 1–20.


