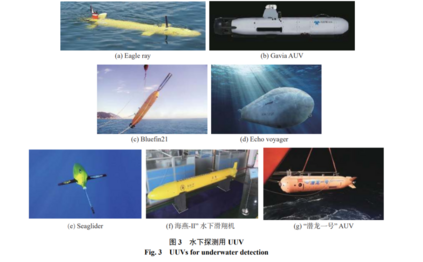
摘要: 以自主水下航行器、水下滑翔机等为代表的无人水下航行器(UUV)在水下目标探测方面, 具有成本低、隐蔽性好、机动性高、灵活组网部署易等优势。随着消声技术的发展和成熟化应用, 潜艇等大型水下航行器的自噪声已接近海洋背景噪声, 单一依靠声波信息进行水下目标探测的技术已不再具有普适化优势, 光、电、磁等非声探测技术已逐步显示出优越性。发挥UUV的航行优势, 搭载光、电、磁等非声探测传感器, 开展目标发现的尝试已逐步成为新的发展和应用方向。文章在分析总结当前UUV已搭载的非声探测传感器的种类、原理和应用情况的基础上, 指出了磁异探测、激光探测、电场探测、重力梯度探测和生物探测等主要研究方向和进展, 归纳了当前基于UUV开展非声探测的关键技术问题和技术难点, 并对发展方向进行了展望, 为非声探测技术的提升提供一定的借鉴。 水下目标探测是通过移动或固定平台搭载一 定数量的探测设备对水中目标进行识别, 在民用 和军事领域均有重要应用价值。依据目标的运动 状态, 一般将被探测目标分为静止目标和运动目 标。静止目标探测包括海底沉船探测、海底管道 探测等; 运动目标探测包括对潜艇、水雷和鱼群等 目标的识别与定位探测等。目标声学探测(简称声 探测)技术是目前最为主要的水下探测技术。依据 探测形式, 目标声探测分为主动声呐探测和被动 声呐探测。声呐可搭载在飞机、船只和潜艇上, 但 探测能力有较大差异, 如机载声呐探测距离约 56~112 km, 舰载声呐探测距离约 20~130 km。主 动声呐隐蔽性差, 探测距离小于被动声呐; 而被动 声呐受环境噪声、平台噪声的影响较大, 只有在目 标发出较大噪声时才能使用[1]。随着消声技术的 发展和应用, 潜艇以及大型水下航行器等水下装 备的自噪声已接近海洋背景噪声, 使声呐对其发 现能力大大降低。消声技术主要应用于水下运动 目标, 尤其是潜艇, 所以非静态目标以及声场较大 的运动目标还是以声探测为主, 非声探测为辅。 水下目标探测平台包括天基、空基、水面和水 下平台[2] , 不同的平台有不同的作用半径。以对潜 艇探测为例, 不同探测平台对比如表 1 所示。天基 探测平台是指集成光学、红外和雷达等设备的卫 星, 覆盖范围广, 可达几百平方千米, 实时性强、安 全性高、准确率高, 但部署成本非常高。空基探测 平台是指可携带或集成多种探测设备的飞机, 应 用广泛、机动性高、准确率高, 但是隐蔽性低、探 测时间短、易受自然环境影响。水面探测平台主 要指配备以声呐为主的舰艇船只, 但是随着各种 消声技术的发展, 声呐探测能力也随之下降。文 中所述水下探测平台指的是具有自主航行能力, 可搭载各种传感器获取海洋环境信息, 可对水下 固定/移动目标开展探测、识别、定位与跟踪以及 区域警戒等任务的无人水下航行器(unmanned undersea vehicle, UUV) [3] , 主要包括自主水下航行 器(autonomous undersea vehicle, AUV)、水下滑翔 机等, 如图 1和图 2 所示。相比于其他平台, UUV 具有成本低、体积小、续航时间长、隐蔽性好、机 动性高、易灵活组网部署等优势, 具有巨大的应用 潜力[4]。 水下非声探测技术按照探测原理可以分为磁 异探测、雷达探测、激光探测、红外探测、电场探 测、重力梯度探测及生物探测等。不同非声探测 技术特点对比如表 2 所示。 磁异探测是较为成熟的非声探测技术, 主要传感器是磁异探测仪。磁异探测仪广泛应用在反潜 机上, 也可以搭载在舰艇和 UUV 上, 具有探测精度 高、识别能力强、不易受海洋环境影响的优点, 但 是对磁异常源的分辨能力有限, 有时无法正确区分 坐底潜艇和沉船。搭载在卫星或反潜机上的雷达 探测只能探测海面或十几米深度中的运动目标。 激光探测主要利用在海水中衰减波段小的蓝绿光 进行探测, 属于主动探测, 具有定位精度高、隐蔽 性好、受海洋环境影响小的优点, 但是作用范围有限, 一般有效作用范围为百米内。激光传感器的搭 载平台为卫星、反潜机、水面舰艇和 UUV 等。 红外探测仪普遍搭载在反潜机上, 也可搭载在 卫星和水面舰艇上, 抗干扰能力强、实时性强。电 场探测技术受环境和天气影响小, 隐蔽性好, 远近 海域均适合, 可以搭载在 UUV 上。重力梯度探测 利用地球重力场进行探测, 隐蔽性强。生物探测 尚处于理论研究阶段, 是未来的前沿科技之一。 非声探测技术已日趋成熟, 部分技术已有成熟 探测设备和成功的应用场景, 但是非声探测多以 天基和空基为主要应用平台, 探测深度以水面和 水下几十米内的深度为主, 对处在百米级工作深 度下的运动目标探测能力较弱。随着 UUV 技术 的发展, 凭借续航能力强、机动性强、噪声低等优 势, UUV 可长时间在几百米或几千米的深度航行 并探测, 是未来非声探测的重要搭载平台之一。 文中介绍了 UUV 和几种主要的非声探测技 术的原理、工作流程、关键技术和发展现状, 总结 了非声探测技术的要点, 并给出了依托 UUV 发展 非声探测技术的主要研究方向。