
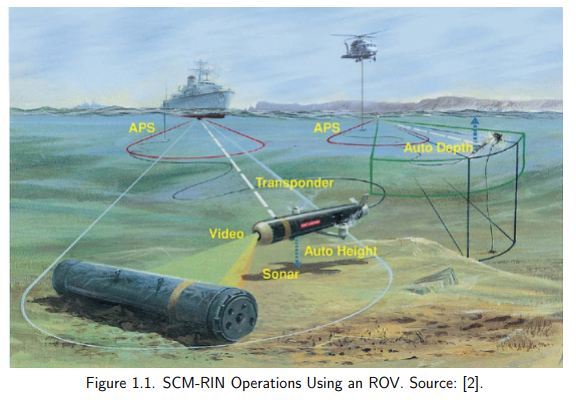
本论文开发了一个基于海底特征导航的模拟框架。使用自动潜航器(AUV)在海底定位感兴趣的物品是一种对海军大有裨益的能力。自动潜航器为消除劳动力需求提供了一个途径,但其购置和维护成本仍然很高。解决这一问题的办法是使用两艘 AUV,其中一艘的能力更强,负责用信标寻找和标记海底物品。配备成本效益型传感器的消耗性 AUV 将对威胁进行定位、识别和消除。利用海底成像技术将海底图像与先验图像马赛克关联起来,再加上超短基线(USBL)信标,AUV 可以在没有传统导航系统的情况下完成具有挑战性的任务目标。增量平滑与测绘 2(iSAM2)是一种同步定位与测绘(SLAM)技术,可用于 AUV 的位置定位,是一种适合实时导航操作的技术,具有图像和 USBL 传感功能。模拟框架能够评估 AUV 的性能,同时将实际操作的风险降至最低。该框架由一个软件架构组成,可使用与实际操作相同的软件进行测试。本论文展示了这一框架,并对其在基于图像的 SLAM 中的可用性进行了分析。
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2024年2月13日
Arxiv
224+阅读 · 2023年4月7日

相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2024年2月13日
Arxiv
224+阅读 · 2023年4月7日