
随着传感器技术和由此产生的传感器分辨率的不断进步,传统的基于点的目标跟踪算法已显得力不从心,尤其是在使用高分辨率传感器的自动驾驶汽车、视觉跟踪和监控等应用领域。这重新激发了人们对扩展目标(ET)跟踪的兴趣,其目的不仅在于跟踪目标的中心点,还在于跟踪目标随时间变化的形状和大小。
本论文探讨了 ET 跟踪应用领域中最具挑战性的三个问题。研究的第一个难题是,在非高斯噪声存在的情况下,需要对具有任意未知星凸形状的 ET 目标进行精确的形状和中心估计。提出的方法基于 Student's-t 过程回归算法,该算法在递归框架中定义,适用于在线跟踪问题。
第二个问题试图通过定义一种新颖的随机多面体形状描述符来放松在估计过程中施加在 ET 目标形状上的任何约束,包括星凸约束。此外,所提出的解决方案还引入了一种方法,以减轻在 ET 跟踪应用中因自闭塞而造成的麻烦,因为忽视自闭塞可能会导致 ET 状态估计出现灾难性的偏差。
最后,研究了在杂波和遮挡情况下跟踪多个 ET 目标的框架,并提出了解决方案。所提出的方法可以在现实场景中估计 ET 目标的中心和形状,同时考虑到自闭和互闭的挑战。所提出的方法为每个 ET 定义了一个随时间变化的状态检测概率,即使在相互遮挡造成的不利条件下,也能延长轨迹。此外,建议的算法使用集合成员不确定性模型来约束被遮挡 ET 的关联和目标形状不确定性,从而获得更准确的 ET 目标状态和形状估计。
所提方法的性能在自闭和互闭的真实模拟场景中进行了量化,其结果与现有的最先进的 ET 跟踪应用方法进行了比较。
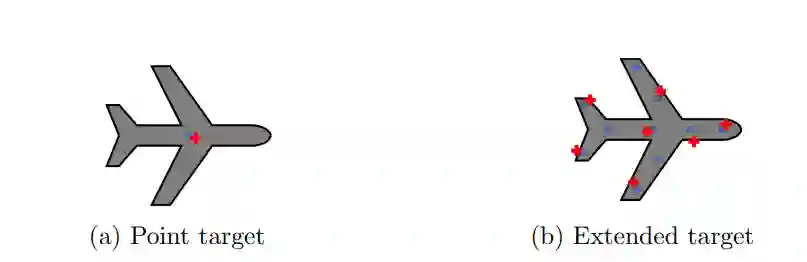
图 1.1: 点目标和扩展目标的并排比较。(a): 点目标的单一测量源和生成的测量结果。(b): 多个散射点和 ET 生成的测量结果。
成为VIP会员查看完整内容
相关内容

Arxiv
224+阅读 · 2023年4月7日


相关VIP内容
相关资讯
相关论文
Arxiv
224+阅读 · 2023年4月7日