
为无人飞行器(UAV)设计注入智能元素以提升其在动态环境中的性能,对军民任务目标具有多重效益。高楼林立的城市街道网络与存在显著温度梯度的森林火灾区域,分别造成飞行环境突变与复杂风况,对自主飞行器构成严峻挑战。通过自主感知应对环境变化,可增强单一UAV设计的适应性,拓展其工况适用范围,从而有效扩大任务覆盖领域。当前,飞行器智能自适应系统研发领域仍处于分治状态:主流研究方向集中于采用多功能智能材料实现飞行器结构形态变化(即"变形技术");另一快速兴起领域则聚焦人工智能与机器学习在控制器开发中的应用。本研究将两大领域融合,构建面向自主自适应飞行的智能多功能变形系统。
首先,开发适用于物理硬件环境的强化学习(RL)训练框架。该伪周期训练方案通过交替执行传统训练周期与探索周期(后者随机重置后续训练参数),为策略更新创造空间。在传统训练间隙,采用离轨策略行动者-评论家算法与经验回放机制实施额外策略优化。在一维平衡态飞行器类比实验平台(气垫滑轨系统)验证表明,该训练框架显著提升学习速度与稳定性。
其次,应用深度强化学习(DRL)为宏纤维复合材料(MFC)驱动弯度变形翼型开发双控制器。在物理变形翼型平台上,分别采用外部传感器精确状态观测与双状态推断模型非完美观测进行阶跃响应测试。与比例微分(PD)控制器对比显示:学习型控制器响应更快、精度更高,且在非理想反馈条件下可有效补偿压电MFC驱动器固有的迟滞效应。
最后,针对含三段变形结构的MFC变形机翼,运用DRL训练阵风载荷减缓(GLA)控制器。该控制器基于压力传感器状态观测,成功降低上下阵风期间升力波动幅度。实验发现:压力测点从1个增至3个使控制性能显著提升(升力波动降低71%-87%),但增至6个未见明显增益。
本研究通过逐章递进的环境复杂度升级,构建自适应变形UAV智能控制系统:从简易一维配平模拟起步,至完全基于硬件训练的自主阵风减缓系统收官。该工作开创性地将多功能材料变形与自主学习控制相结合,为实现真正智能变形UAV迈出关键一步。
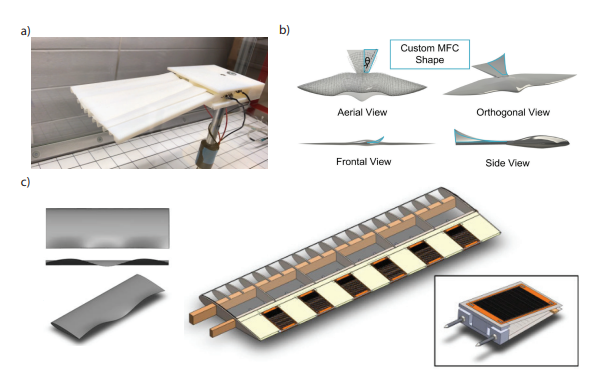
图1.2:智能材料用于航空航天变形设计。



