
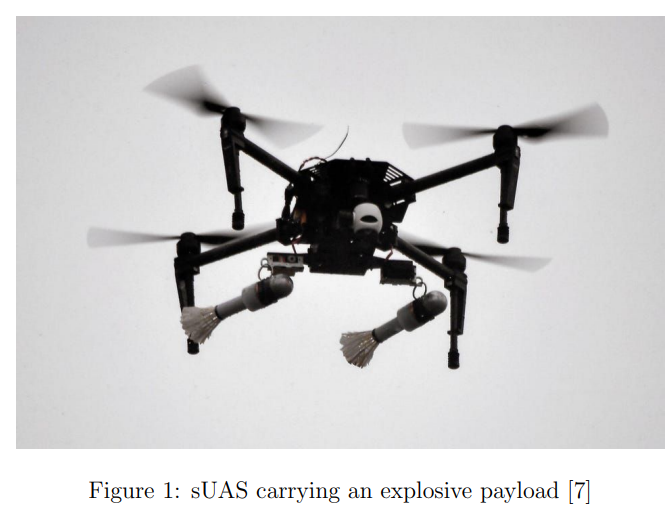
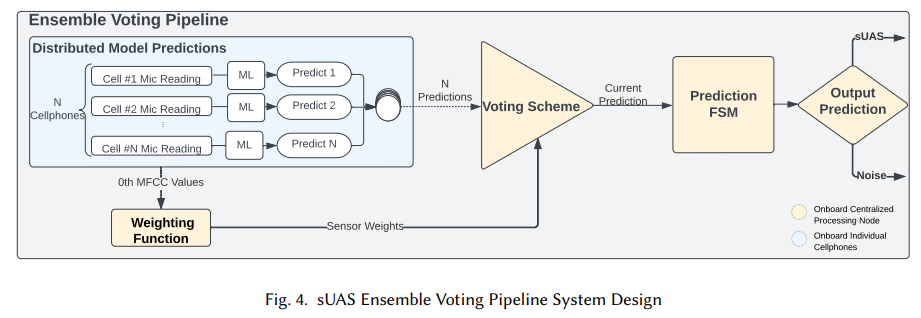
小型无人驾驶航空器系统(sUAS)是一种易于获取的技术,对美国关键系统的威胁越来越大。它们体积小、重量轻、难以探测,这使得小型无人机系统可以提供侦察、投放爆炸物,甚至撞击敏感目标。这种具有威胁性的技术要求使用容错、低成本、可更换和精确的传感资源,以应对无人机系统无处不在的特性。因此,本文开发的方法是利用手机等可获取的传感资源来探测和跟踪 sUAS。这项研究工作源于空军研究实验室(AFRL)的一次数据收集,在这次数据收集中,无人机飞越了记录时间戳声学数据的手机群。在第一项工作中,开发了一种基于声学传感器网络的 SUAS 检测方法。该方法使用一个集合表决管道(EVP),融合来自分散在机场各处的 28 部手机的时间同步、低保真声学数据,以做出实时无人机探测决策。这项工作在模拟测试场景中实现了 0.846 的探测 F1 分数。该管道的性能还优于传感器网络中每部手机对无人机的检测性能,后者的平均检测 F1 分数为 0.582。
在后一项工作中,使用采集的声学数据训练了一个深度学习模型,以预测来自手机的 SUAS 范围。一个二维卷积神经网络(2DCNN)在四个不同的范围类别中以 0.7492 的宏观 F1 分数预测了 sUAS。这两项工作结合在一起,证明了利用可获取的传感资源实现高保真无人机系统探测和跟踪结果的优点。
成为VIP会员查看完整内容
相关内容

Arxiv
224+阅读 · 2023年4月7日

相关VIP内容
相关资讯
相关论文
Arxiv
224+阅读 · 2023年4月7日