
泛域指挥控制决策过程发生于日益动态复杂的环境中。现代作战域不仅涵盖传统的陆、海、空领域,还包括太空、网络与信息等数字时代新域。环境变化速度的加快要求指挥官创新适应方式以应对权限行使与任务意图执行中的情境变迁。本技术报告通过范围界定研究,梳理情境识别与感知的动态演变,并基于此提出指挥控制任务模型。报告分为三部分:第一部分综述情境感知与识别的文献成果,界定关键术语并概述技术前沿。情境识别被描述为将复杂环境表征为特征化图式、框架或模型的过程,明确这些抽象结构在数据、信息与能力层面对决策的作用。第二部分结合文献综述与加拿大军队指挥人员访谈,开展指挥控制任务分析,提出环形图任务模型,刻画任务域间多重同步影响(作为情境效应)及其作为情境识别的基础。第三部分提出未来研究方向,旨在深化情境识别理解,探索人工智能等数字技术辅助指挥官情境识别与决策的路径。
文献综述方法论
本研究通过联邦科学数据库检索军事与海军科学领域核心术语相关文献,辅以互联网扩展搜索技术获取关联成果,并在"指挥控制"预定义概念框架下展开综述。围绕"情境"定义及其子主题(如"情境感知"与"情境识别",其中"情境"被视为可触发适当响应的泛化形式),研究识别出三大解释范式:情境即图式、情境即框架、情境即模型。
• 图式(Schema):语义框架,协助个体组织、处理与存储环境信息,由填充空白占位符的符号/词汇及填充方法构成。
• 框架(Frame):心理态度,定义背景假设与预期集合(Lakoff)。
• 模型(Model):科学或计算结构,描述环境、过程或系统,可分为确定性、随机性或概率性,涵盖逻辑模型、心智模型、仿真模型与多目标优化模型等类型。
概念定义
- 未来指挥控制发展趋势
未来指挥控制将呈现高度复杂性与集成化特征。指挥控制(C2)指指挥官对配属部队行使权威与指导以达成任务目标,联合部队指挥官(JFC)需为联合部队提供作战愿景、指导与方向(Bass & Brown,第27页)。"C2行动中的情境具有动态性,涵盖任务、敌情、地形(与气象)、人员、可用时间及民事支持等要素"(Liu等,2011,第144页)。《2035联合作战环境》指出未来作战环境将极端复杂且交互性强,要求"实时全网络化C2能力"以实现"行动整合与同步"(Tucholski,2021年5月;JP 3-0,2022年)。
空军与工业界正推进国防部门"全域传感器-射手网络化"概念落地。Easley(2022,第26-27页)强调:"技术已成熟,需解决作战生态系统的多级安全与数据可信问题。"最终成果体现为2023年验证的云基指挥控制(CBC2)倡议(Gordon,2023;Cliche,2024)。Cliche指出:"CBC2整合海量战术相关数据流及人工智能与机器学习技术,使决策者保持对环境细节的态势感知。"
- 现代决策科学理论体系研究
现代决策科学的核心目标在于"构建能够为兵力规划与作战计划提供有效决策工具的框架"(Yuan与Singer,2021年),其关键在于发展应对动态变化环境的响应能力。经典决策科学将环境视为可应用情景推演、作战博弈或德尔菲法等定性方法的系统(Davis等,2005年,第33页)。然而,面对日益复杂的环境,"与其试图预测不同方案对系统的影响并'优化'选择,不如承认有效预测通常不可行,转而寻求灵活、自适应且鲁棒的策略"(同上,第46页)。下文梳理文献中的现代决策方法,各方法均强调情境在现代环境决策中的作用。
- OODA循环决策模型
约翰·博伊德提出的观察-定向-决策-行动(OODA)隐喻决策循环模型,旨在实现快速精准决策(Maccuish,2012年,第67页)。"军事心智模型在冲突实践的持续检验中形成,其应用范围远超原始场景。"在OODA模型中,情境在"定向"阶段起核心作用。定向"涉及评估数据的关联性与重要性,理解其在宏观情境中的定位,识别潜在机遇或威胁"(Wale,2024年)。该模型体现于加拿大陆军仿真中心(CACSC)作战规划流程(OPP),其五阶段包括:启动、定向、行动方案制定、计划开发与计划审查(CACSC,2018年,第11-16页)。OPP以战场情报准备(IPB)为基础,IPB涵盖敌情与"人文地形"要素——即区域、设施、能力、组织、人员与事件(ASCOPE)(CACSC,2018年,第18页)。本研究中,ASCOPE要素构成决策情境的主体框架。
- 意图驱动型领导力模型
大卫·马凯特的意图驱动型领导力(IBL)模型"并非基于领导者-追随者模式的权力流动,而是建立在个体间共享目标或意图的基础上。军事类比下,领导者-追随者模式类似指挥控制,而IBL模型接近任务式指挥"(Fernandez-Salvador,2017年)。尽管IBL多从领导力视角探讨,但其作为训练模型可培养学习者的情境感知能力。"通过IBL,学习者获得问题解析经验。随着问题解决方案的构建,问题本质逐渐明晰,学习者开始自主解决问题并适应变化"(Duffy与Raymer,2010年,第v页)。
- 联合决策机制研究
全域或联合作战涉及多层级指挥与军种协同,催生联合决策需求。该领域研究成果体现于《联合目标定位学校学员指南》(2017年)等文献,其中详述联合作战规划流程(JOPP)七步法(第7页),涵盖适应性规划与执行(APEX,第6页)及作战环境系统视角(第18页)等核心议题。联合决策模型在作战规划流程(OPP)基础上,构建联合作战规划流程(JOPP)与联合作战环境情报准备(JIPOE)等框架,强化对信息环境的系统性认知(Sylvestre,2022年,第14页)。当前该流程在美国防部情报次长办公室支持的信息环境高级分析课程中系统阐释(JMark,2024年)。
- 鲁棒决策方法(RDM)
鲁棒决策(RDM)是"针对深度不确定性与复杂环境的定量决策支持方法论,助力防务规划者制定适应多重难预测未来的强韧方案"(Lempert等,2016年,第2页)。区别于"共识假设"(Kalra等,2014年)或"预测后行动"决策范式,RDM采用"'决策共识'逆向分析法",通过"模型与数据对策略进行广域未来路径压力测试"。如Lempert指出(注释3),"深度不确定性决策(DMDU)文献对此逆向分析流程的表述包括'情境优先'(Ranger等,2010年)"(Lempert,2019年,第27页)。
- 决策支持技术发展
决策支持工具在决策流程中的应用逐步普及,典型案例包括作战资源分配支持(CORALS)软件原型系统开发(Irandoust与Benaskeur,2015年;Turgeon,2021年)。
- 深度不确定性下的决策(DMDU)
深度不确定性指系统运作机制与未来结果均无法达成共识的决策情境。对此,Kwakkel与Haasnoot(2019年,第357页)主张采用多样化表征模型,通过情景推演、探索性建模与适应性规划等方法应对多重态势类型。DMDU提出此类方法的分类体系(含前述RDM),针对不同场景适配应用。
态势感知与态势识别研究
- 态势感知
现代决策理论要求通过态势感知(SA)理解适用何种表征或模型。"鉴于态势感知本身的复杂性及其获取与维持涉及的多重过程,精确定义其构成要素极为困难"(Banbury与Trembley,2004年,第Xiii页)。此外,"态势感知模型通常笼统描述认知过程,但未明确具体机制及其作用程度"(同上)。这要求理解达成态势感知的机制——本文称为"态势识别"。"态势感知作为理论构念的检验标准,在于能否通过客观、明确定义的自变量(刺激操控)与因变量(响应差异)实现操作化...否则,其将成为掩盖科学认知不足的又一流行术语"(Flach,1995年,第155页)。
- 态势识别模型实例
艾伦研究院提出的"基础态势识别"(Grounded Situation Recognition)是"需生成图像结构化语义摘要的任务,包括:主体活动、参与实体及其角色(如施动者、工具)、实体的边界框标注"(Pratt等,2020年,第1页)。Chmielewski与Sobolewski(2019年,第38页)将态势识别描述为"由数据生成、数据整合与过滤、数据可视化、知识获取与推理构成的连续数据流过程"。Meng等(2022年,第1443页)提出的人机协同态势感知模型包含人类认知部分(态势感知)与机器部分(态势识别),其中态势识别"主要对应人类的态势感知环节,即基于侦察情报、趋势情报等客观数据对当前态势进行直观分析"(第1444页)。
Baek等(2022年,第308页)提出"基于图语义信息的多智能体分类分布式图匹配网络"与"分析智能体高阶关系的超图模型"。Lee等(2023年,第6041页)描述基于多模态数据与图神经网络(第6042页)的四层架构:基于多智能体的人机协作架构、鲁棒战术地图融合技术、基于超图的表征学习、时空多层模型。"该模型提供基于协同智能的实时战场态势识别技术"(第6066页)。
情境感知与情境识别
- 情境类型综述
文献中描述的情境类型包括:
● 活动、身份、位置与时间(AILT)(Dey与Aboud,1999年)
● 与位置、附近人员、主机或物体相关的情境及其随时间演变(Schilit等,1995年)
● 适配个体特定条件的情境(Brown等,1997年),例如包含移动设备性能、网络连接特性及用户情绪状态、注意力焦点与方位等专属信息。
● 行为驱动型情境。基于情境的推理(CxBR)建模范式认为,情境"包含使智能体能在当前情境中成功'导航'的功能性要素"。
● 跨层级情境(个人、项目、团体与组织),涵盖人员及其专业知识、信息来源、信息文档及其相关性评估、相关实用文档(Snowden与Grasso,2000年)。
● 用户视角下的情境数据谱系:计算情境、用户情境、物理情境、时间情境与社会情境(Gu,2009年)。
● 能力与可供性关联型情境。虽未发现直接文献支撑,但此表述是前述视角的自然延伸。
- 情境感知与情境识别
"情境感知"指对情境的认知能力或状态;"情境识别"则指实现情境感知的过程或方法。
Bricon-Souf与Newman(2007年)将情境感知定义为:
• 程序或计算设备检测、感知、解释环境要素(如位置、时间、温度或用户身份)并作出响应的能力;
• 或从应用情境适配视角,指应用程序通过检视计算环境(如用户位置、周边人员与设备集群)并响应动态变化,从而调整自身行为的能力。
Dey(1999年)提出:"若系统利用情境向用户提供相关信息或服务(相关性取决于用户任务),则该系统具备情境感知能力。"
情境识别可采用多种机制。例如,Pernek与Ferscha(2017年)在外科手术情境识别研究中列举以下方法:
• 环境追踪:通过"可插拔监测设备推断手术流程"(第1722页);
• 运动学追踪:"追踪手术器械位置或量化外科医生手部动作"(第1723页);
• 视频追踪:"从体内视频图像识别操作行为"(第1723页);
• 认知状态情境:通过眼动、皮肤电反应、心率、施力数据监测(第1724页起)。
主流机制采用机器学习或神经网络模式识别算法。例如,Radu等(2018年)研究"深度学习算法解析多传感器系统捕获的用户活动与情境的效能"(第157.2页);Billones等(2018年)探讨深度学习在车辆情境识别的应用;Alajaji等(2020年)提出"DeepContext——基于深度学习的智能手机用户情境识别架构"。
- 情景感知决策支持系统演进研究
情景感知决策支持(CaDS)系统正从基于本体的专家系统向基于属性的神经网络系统演进。此类系统"构建共享态势感知的情境模型"(Feng等,2009年,第455页),旨在应对军事指挥控制中的信息过载问题,例如战术信息优先级系统(TIPS)(Marmelstein等,2008年,第259页)。相关研究目标在于"增强决策者对底层知识空间的感知、理解与投射能力"(Hanratty等,2009年,第1页)。Dourish与Bellotti(1992年,第107页)指出,意识是对他人活动的理解,为自身行动提供情境支撑。"意识要求个体能将碎片化情境知识转化为当前注意焦点的程序化情景"(Mäkelä等,2018年,第7253页)。Thomas(2003年)定义了态势感知核心术语与词典体系,并从组织、作战、信息与推理需求维度解析指挥情境。
当前CaDS系统主要沿袭专家系统架构,采用"基于多Agent系统的本体驱动军事信息服务决策支持",包含以下组件:检测原始数据的传感器Agent、处理情景数据的情境管理Agent、信息服务Agent、作战决策支持Agent及维护用户信息的用户Agent(Song等,2010年,第1页)。前沿研究聚焦深度学习应用,早期成果表明"将模板属性权重与神经网络权重类比的直觉方法,可通过观察智能体历史行为直接学习权重参数"(Gonzalez,2004年,第169页),支持基于情景的推理(CxBR)作为"战术场景人类行为建模技术"。
数字技术赋能情境感知与识别的潜在应用方向
下面探讨数字技术如何通过整合情境感知与识别能力,辅助指挥官执行全域指挥控制任务。
基于访谈的潜在应用场景,访谈识别出以下技术应用方向(按无优先级排序):
-
任务规划
- 战备提升、团队组建、规划空间内地理情报整合。
-
部队福祉保障
- 通过心理测量问卷/辅导及生物特征传感器监测官兵身心状态。
- 可对比重大事件发生前基线数据进行分析评估。
-
经验教训自动化融入决策
- 构建经验教训文档数据库。
- 训练神经网络(AI模型)学习经验数据。
- 向神经网络输入新作战任务参数。
- 通过模型按任务相似度排序经验文档并推送最优方案。
- 可选功能:自动生成相关经验摘要。
-
实战任务数据实时报告
- 涵盖燃油消耗、弹药、水源、食品等后勤指标——需覆盖偏远作战区域(如北极地区)的仓储与运输节点(机场、燃料补给点、航道)。
- 评估物资补给对当地社区的影响(如占用有限民生资源)。
- "竞争性后勤保障"——需预判敌方破坏供应链能力(如网络攻击关闭港口),要求AI分析战略交通线脆弱性。指挥官制定计划时不可预设资源可用性。
-
通信频谱态势报告
- 快速获取通信系统可用状态、性能衰减程度及有效覆盖范围。
- AI辅助评估通信方案效能,自动化生成主用-备用-应急-紧急(PACE)通信方案(当前依赖人工制定)。
-
AI目标识别
- 基于图像/雷达/声呐/防空系统等多源传感器数据训练AI模型,快速识别关注目标并推送告警。
- 构建"AI视觉增强"系统,保持人在回路决策,目标定位信息集成至态势地图。
上述方向需进一步评估实施范围、优先级与资源投入强度。
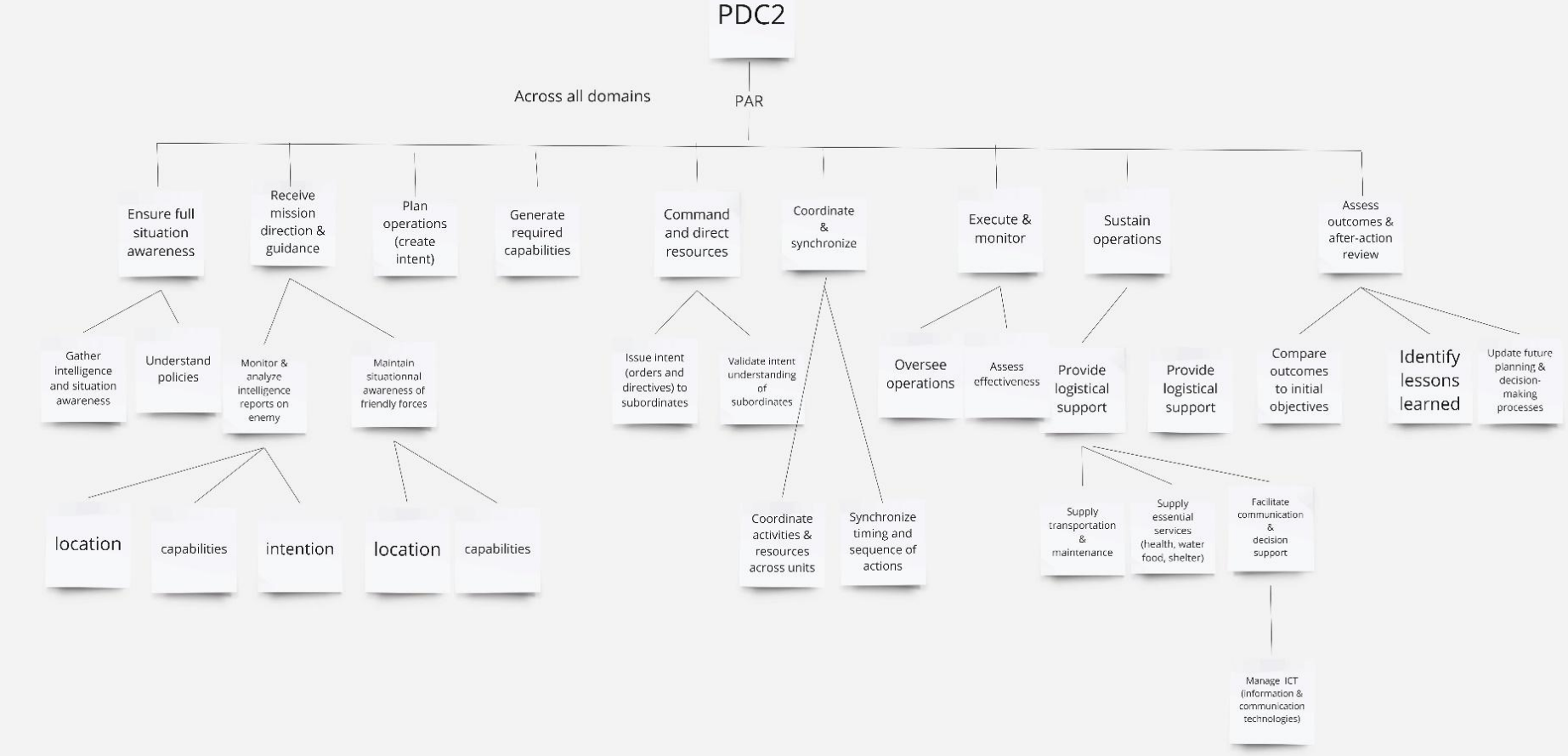
图1所示。使用分层任务分析的PDC2任务模型的说明
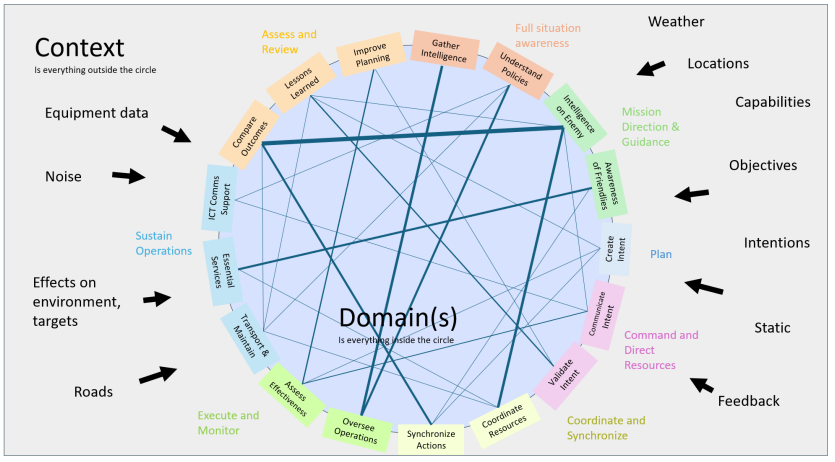
图2。循环任务模型的说明。
