
在航运交通中对无人潜航器(UUV)进行探测、分类、定位和跟踪(DCLT)是被动声学港口安全系统的一项关键任务。一般来说,船舶可以通过机械振动和空化噪声产生的独特声学特征进行跟踪。然而,UUV 的空化噪声比船舶和船只要小得多,这就大大增加了探测的难度。本论文在浅水实验中使用固定阵列与过往船只一起演示了利用 UUV 的高频电机噪声被动跟踪 UUV 的可能性。首先,通过对两艘 UUV 在不同速度下的直接测量,确定了高频音的成因。通过分析,确定了噪声的共同主要特征:电机脉宽调制频率及其谐波的强音。根据马达的独特声学特征,推导出了一种高精度遥感方法,用于估算螺旋桨的转速。在浅水无人潜航器现场实验中,证明了与来自飞行器的宽带噪声相比,通过电机噪声探测无人潜航器可将误报率从 45% 降低到 8.4%,真实探测率为 90%。与宽带噪声相比,对电机噪声进行波束成形可将方位精度提高 3.2 倍。由于信号也是高频的,因此可以观察到电机噪声的多普勒效应,证明测距率是可以测量的。此外,与 "噪声包络调制检测 "算法相比,测量电机噪声是一种估算螺旋桨转速的更优方法。从电机特征推断多个测量值意义重大,因为轴承-多普勒转速测量值优于传统的轴承-多普勒目标运动分析。在无特征卡尔曼滤波器的实施中,轴承、轴承率、测距和测距率的跟踪解精度分别提高了 2.2 倍、15.8 倍、3.1 倍和 6.2 倍。这些发现对于改进无人潜航器定位和跟踪以及为下一代静音无人潜航器推进系统提供参考意义重大。
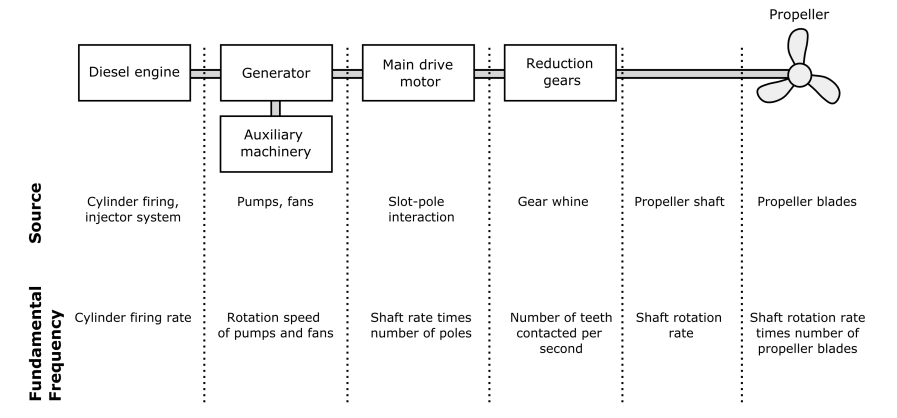
图 2-3:柴油发动机内部如何产生机械噪音的示意图。
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2024年5月31日
Arxiv
86+阅读 · 2023年4月4日
Arxiv
152+阅读 · 2023年3月29日
相关主题


相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2024年5月31日
Arxiv
86+阅读 · 2023年4月4日
Arxiv
152+阅读 · 2023年3月29日