
与旋转翼无人机相比,固定翼无人机在速度、续航时间和效率方面具有显著的性能优势。这些特性使这些飞行器成为远程或高速侦察行动的理想选择,并使其成为异构多机器人团队的重要补充成员。然而,这些飞行器在垂直起降(VTOL)和机动性方面一直受到严重限制,这大大限制了它们在复杂障碍物区域(如森林或城市中心)环境中的应用。
本文介绍了一套算法和硬件进展,使灵活的固定翼无人机能够在复杂的城市环境中作为蜂群成员运行。方法的核心是一种直接非线性模型预测控制(NMPC)算法,它能够通过积极的失速后机动控制固定翼无人机。用硬件演示了在线规划和控制技术如何实现在狭小通道和近距离障碍物中的导航。还演示了如何将方法与机载立体视觉相结合,在未知环境中实现高速飞行。最后,介绍了实现蜂群系统集成的方法;其中包括促进自动起飞的万向球螺旋桨设计、精确的深失速着陆能力、多飞行器防撞以及与现有蜂群架构的软件集成。
本文的结构如下。在第 2 节中,概述了相关工作。在第 3 节中,将详细介绍技术方法,包括动力学模型和控制算法的制定。将在第 4 节分析该算法的性能。第 5 节通过在室内环境中使用动作捕捉进行硬件实验来评估性能。第 6 节测试了在室外环境中使用机载处理的方法,第 7 节演示了使用机载立体视觉进行无碰撞导航的飞行。然后,在第 8 节中,讨论了如何应用 NMPC 算法来应对城市蜂群行动的挑战,包括起飞、着陆、避免碰撞和蜂群系统集成。最后,在第 9 节中,将讨论成果,并提出未来的工作方向。
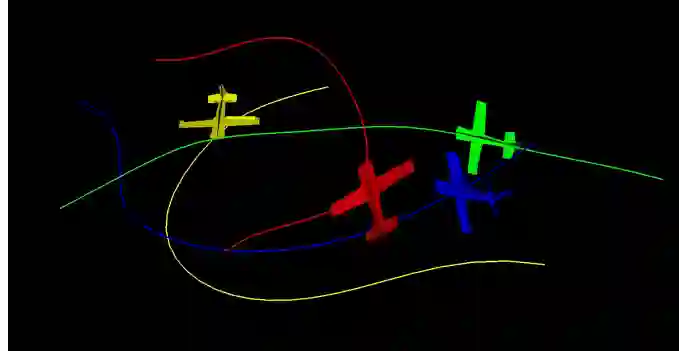
图 27. 利用 NMPC 算法的共享轨迹障碍物地图约束优化的四条无碰撞轨迹的模拟截图
蜂群系统集成
为了支持大规模蜂群行动,将 ACCIPITER 自主堆栈与 CCAST 框架(Clark 等人,2021 年)进行了整合。飞行器能够接收来自 CCAST 蜂群指挥官的任务指令,并通过 ROS 接口在 LTE 网络上共享信息(见图 28)。为了连接到 LTE 网络,我们在飞行器上集成了 LTE 调制解调器。为便于任务分配,我们根据城市测试场地的先验地图预先规定了特技飞行战术。通常,这些战术包括穿越城市环境的预计算飞行路径。然后,利用这一预先计算的飞行路径为 NMPC 算法设定后退地平线目标点。例如,在建筑物扫描战术中,飞行计划由一条连接发射地点和目标建筑物的路径组成。蜂群指挥官可以在运行时将特定的建筑物扫描任务分配给特定的飞机,而不是指定路径本身。当固定翼无人机探测到一个靶标时,探测结果和靶标位置会通过 LTE 网络传回基站,并显示在城市环境地图上。特技飞行固定翼小组成员的计划轨迹通过 LTE 网络传输,并存储在每架飞机的轨迹障碍物地图中。轨迹障碍物地图中只包括特技飞行器,因为与固定翼无人机相比,其他系统的移动速度很慢,使用当前的遥测信息来避免碰撞就足够了。
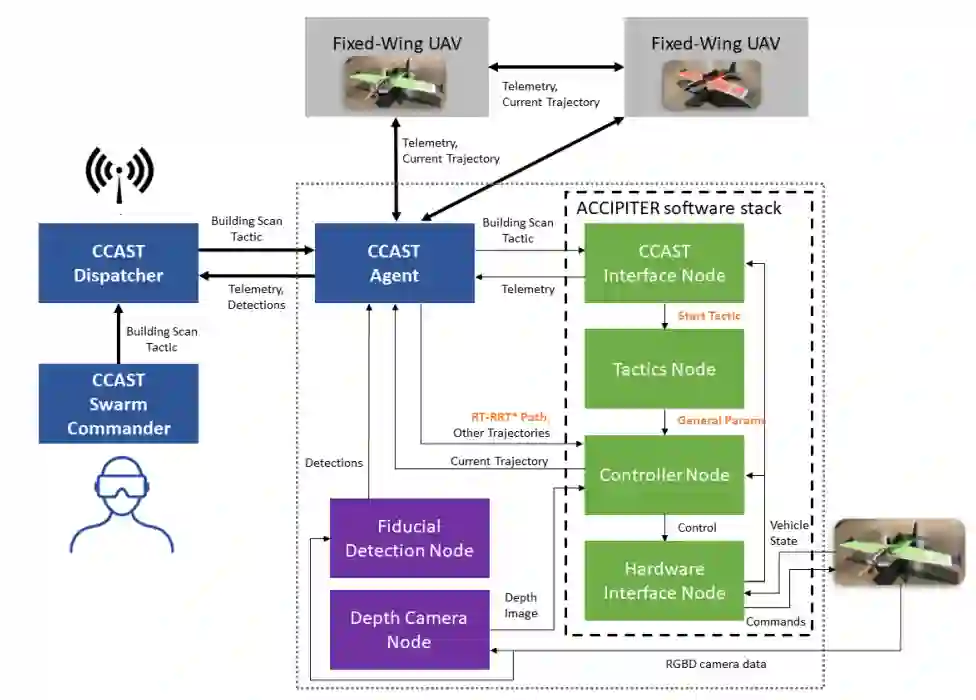
图 28. 集成到 CCAST 架构中的 ACCIPITER 技术示意图。深色虚线表示 ACCIPITER 的核心能力。绿色和紫色块在特技飞机上运行。橙色文字表示尚未集成的功能,但可促进与 CCAST 星群更紧密的集成。
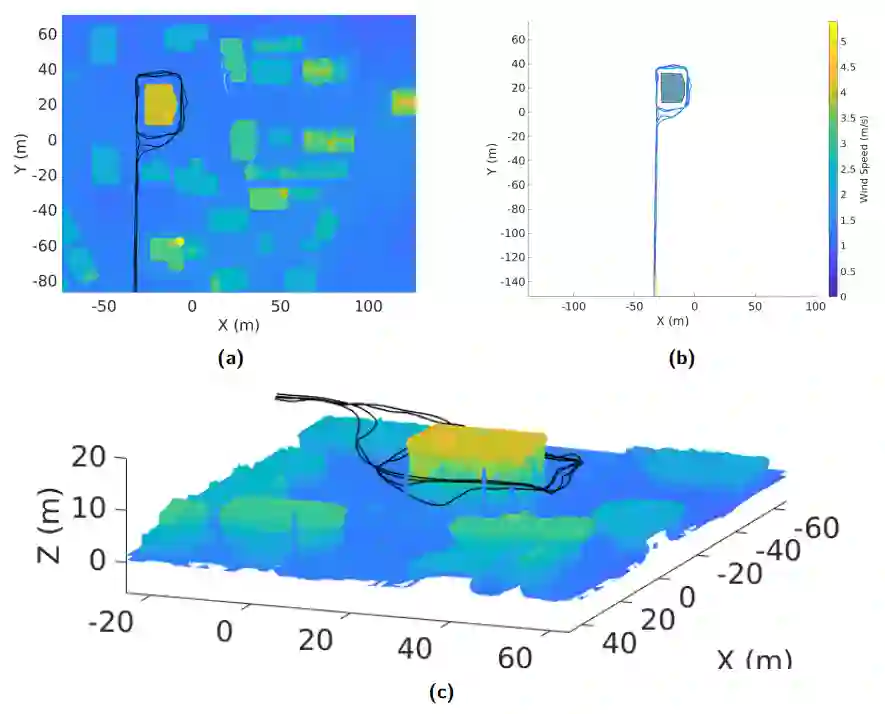
图 30. (a) 图中显示了在卡西迪塞尔比联合武器集体训练设施(CACTF)进行的两次建筑物扫描测试的飞行位置数据(黑色)。(b) 图中显示了实验过程中风的变化情况。(c) 飞行器飞行轨迹的三维视图。
