

在未来的战斗机概念中,有人-无人编队与无人战斗飞行器(UCAV)的组合都是其中的一部分。然而,虽然在设计和研究方面投入了大量精力,但加入 UCAV 是否能带来更好的任务结果仍有待观察。此外,理想的设计和作战概念还存在很多不确定性。这项工作旨在通过解决所有三个要素来改变这种状况。利用基于知识的工程学,设计了一套用于压制和摧毁敌方防空系统的 UCAV。在参数研究框架内,使用基于智能体的建模方法进行了基于物理的战斗模拟。结果通过任务有效性、生存能力、成本和致命性进行分析。采用现代战术,将包含 UCAV 的编队性能与不包含 UCAV 的编队性能进行比较。结果表明,当 UCAV 作为大型载人编队的一部分部署时,任务效果会有明显改善。具有低可观测性和平衡特定过剩功率的 UCAV 可实现最佳效果。作战概念也有影响。与携带两枚导弹的四架 UCAV 相比,携带四枚反辐射导弹的两架 UCAV 的总体生存能力更高。总体杀伤力则相反。这些结果为 UCAV 的最佳设计和功能以及有人-无人编队概念提供了宝贵的见解。
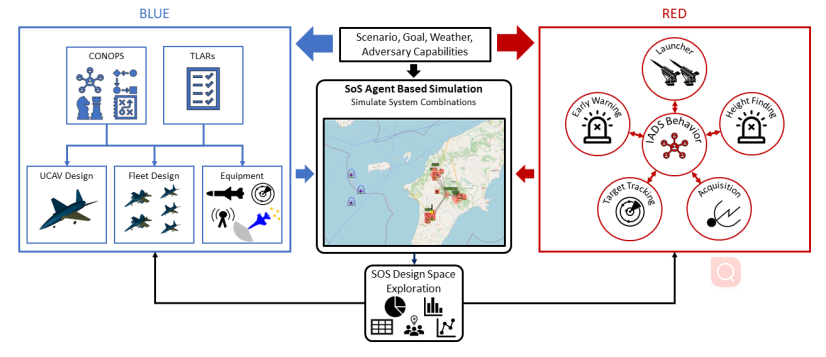
图 2 - 框架描述,包括流程的各个步骤
自 20 世纪 90 年代初以来,无人战斗飞行器(UCAV)已被证明是现代战争中不可或缺的资产。早在第一次世界大战[2]时,第一批无人飞行器(UAV)就已投入实战,而 “捕食者”、“死神 ”和 “全球鹰 ”等 UCAV 则彻底改变了现代战争。工程师和军事决策者早就设想 UCAV 取代有人驾驶战斗机[3],而技术进步也正朝着这个方向发展。
然而,洛克希德-马丁公司(Lockheed Martin)等公司同时也在开发一种不同的 UCAV 概念。他们设想的系统将 “补充现有的有人和无人系统,而不是与之竞争”,并 “作为未来系统之系统的一个要素运行”[4]。他们在 1995 年描述的无人战术飞机概念如今被称为 “忠诚僚机”(Loyal Wingman)或远程载机(RC)的 “有人-无人编队”(MUM-T)。
将 UCAVs 作为大型系统的一个组成部分有多种优势:
-
UCAV 可以接管危险任务,如压制敌方防空力量,而有人指挥战斗机则保持安全距离,从而降低飞行员和机体的风险。
-
UCAV 不受人类身体条件的限制,可以进行更难或更具挑战性的机动,从而有可能获得优势。
-
UCAV 有望比有人驾驶飞机更便宜,因为它可能更小、更轻,设计服役时间更短,从而降低成本。
由于 UCAV 将与指挥战斗机(CF)高度联网,这一概念也带来了额外的好处[5, 6]:
-
通过传感器融合,UCAV 可以提高指挥战斗机飞行员的态势感知能力。
-
飞行员的工作量可以减少,从而提高他们的工作效率。例如,UCAV 可以应对空中威胁,这样有人驾驶战斗机的飞行员就可以专注于不同的任务,如提供近距离空中支援。
-
与 “捕食者 ”等无人机不同,像 “忠诚僚机 ”这样的网络化 UCAV 主要在原地控制,这样指挥官就能直接目睹情况。这消除了许多技术和后勤方面的困难以及道德方面的担忧。
认识到这些优势后,许多国家已着手开发此类网络化 UCAV 概念。著名的例子包括 Kratos Defense 公司的 XQ-58 Valkyrie 和澳大利亚波音公司的 MQ-28 Ghost Bat。如图 1 所示,空中客车公司也提出了 MUM-T 的愿景。
图 1 - 空客公司开发的网络化 UCAV 效果图
虽然为开发这些概念做出了巨大努力,但目前只有少数飞行原型。仅有的几个原型机还处于测试的早期阶段。因此,还没有(公开的)概念证明。出版物通常侧重于实施 MUM-T 的 “较小 ”方面。例如控制算法[7]、决策[8]或 UCAV 本身的设计[9]。然而,正如其他文章[10, 11]所述,要评估任何与动态环境交互的系统的有效性,都必须进行全面的系统(SoS)分析,因为 “突发行为”(Emergent Behaviors)在整体性能中发挥着重要作用。在 MUM-T 的背景下,已有此类系统分析的实例[12-14],但保真度较低,与飞机设计方面的联系甚少。Weiß、Haindl 和 Gräßel 发表了一篇引人注目的文章。该小组将基于代理的建模应用于一个作战场景,并得出结论认为,包括 UCAV 在内可实现 “力量倍增”[15]。然而,为了验证 MUM-T 的概念,并更深入地了解新出现的行为,还需要更多的定量数据。UCAV 的加入是否会带来更好的任务结果还有待观察。此外,使用 UCAV 的 MUM-T 是否能带来其所承诺的优势也有待证明。最后,目前仍不清楚这种 UCAV 应该是什么样子,也不清楚应该如何使用才能产生上述优势。本文旨在填补这一研究空白。此外,本文还试图深入探讨网络化 UCAV 的 “最佳 ”设计和要求及其作战概念(CONOPS)。本文根据已确定的研究空白确立了一个主要研究问题,旨在提供概念验证。
问题 1 加入 UCAV 对攻击机群的效能有何影响?衍生出与 UCAV 设计和使用相关的次要研究问题,即
问题 2 针对特定作战任务,网络化 UCAV 的最佳设计是什么?
问题 3 使用网络化 UCAV 的理想战术是什么?
为回答这些问题,将采取以下步骤:
- 制定一个相关的冲突场景。
- 根据场景推导出战斗任务和一系列顶级飞机需求(TLAR)。
- 使用德国航空航天中心(DLR)开发的知识工程(KBE)工具 VAMPzeroF [16],根据 TLARs 设计多种 UCAV。
- 利用任务剖面图,使用 Battlespace Simulations Inc.
- 在 MACE 的战斗模拟中,通过在不断变化的机队组成中部署不同的 UCAV 设计,进行了参数研究。
- 对作战模拟的结果进行评估,以确定整个系统的有效性。通过任务有效性、生存能力、成本和致命性,将不同的设计相互比较,并与既定的参考案例进行比较,从而得出 UCAV 设计、作战概念(CONOPS)和概念有效性的结论。
上述步骤中没有一个是未有的。但是,在公开文献中还没有发现将各个步骤结合起来的方法。此外,这种方法还未被应用于僚机概念、远程载具或有人无人编队(MUM-T)的分析。因此,本文提出了一种新颖的方法,用于设计和评估作为大型异构系统要素之一的新型飞机配置。
概述的步骤形成了一个框架,可用于各种系统的系统分析。该框架如图 2 所示。之前也有人提出过类似的框架[17],特别是针对城市空中机动[18-20]和空中野火扑救[21, 22]的使用案例。它还被应用于军用飞机设计 [23, 24]。
上文概述的步骤也是第 2 节的结构,该节涵盖了方法论。第 3 节介绍结果。第 4 节详细介绍了从结果讨论中得出的结论,并对之前确定的研究问题给出了答案。
