
本文内容参见美国陆军条令条例相关资料整理如下。所列系统代表了美陆军当前实际部署应对无人机威胁的最常见能力。部分系统由防空人员操作,另有部分可作为各军种通用能力使用。此清单虽非穷尽所有,但涵盖了当前陆军各作战区域最常用的装备。
1.固定式低慢小无人机综合防御系统
“固定式低慢小无人机综合防御系统”(FS-LIDS)是一种集成的 “反无人机系统体系”(CUAS system-of-systems),可探测、识别、跟踪和压制无人机威胁(见图1)。该系统通过 “电子战”(EW)能力,利用 “公爵”(Duke)和测向天线,提供增强的探测与压制概率。它使用具备自动旋转能力的 “光电/红外摄像系统”(electro-optic/infrared camera),协同雷达捕捉跟踪目标以实现精确识别。FS-LIDS的主要子系统包括:
- “电子战”(EW)子系统。主要组件含:
- “主控单元”
- “辅助单元”
- “电子战定位导航授时元件”(EW position, navigation, and timing element)
- “低噪声放大器”
- “指挥控制”(C2)笔记本电脑
- “测向单元”
- “C型套筒桅杆”(C-kit mast)
- 雷达子系统。 主要组件含:
- “中央天线组件”
- “顶帽组件”
- “天线阵列柱”
- “惯性导航系统”
- “示波器组件”(Scope assembly)
- “接地板”
- “电源模块”
- 摄像子系统。 主要组件含:
- “红外摄像机”
- “光电摄像机”(Electro-optical camera)
- “云台定位器”(Positioner)
- “电子控制箱”(Electronics box)
图1. 固定式低慢小无人机综合防御系统(FS-LIDS)
“AN/TPQ-50多任务雷达”主动探测并跟踪无人机,同时“夜鹰光电红外摄像机”与“反无人机电磁战系统”对探测到的无人机进行二次定位、验证、识别和分类。该“反无人机电磁战系统”通过其“电子攻击能力”(EA capability)干扰或压制威胁无人机的“定位导航授时”(position, navigation, and timing)、“指挥链路”(command link)及“视频下行链路信号”(video downlink signals)。当FS-LIDS配合“郊狼无人机拦截弹家族”(Coyote family of UAS interceptors)使用时具备杀伤能力。
“前沿区域防空指挥控制系统”提供交战操作、航空器规避及防止误伤功能。该系统支持“防空指挥控制”(air defense C2)系统与“Link-16数据链”实现互操作。
配备杀伤性拦截方案的FS-LIDS包含“托盘化KuRFS雷达”(palletized KuRFS radar)和“托盘化郊狼导弹发射舱”(palletized Coyote missile pod)(见图2)。

图2. FS-LIDS动力反制方案
2.Ku频段多功能射频传感器
“Ku频段多功能射频系统”(简称KuRFS)是一种经过验证的真正多功能雷达,可同时执行“反无人机”(C-UAS)、“反火箭炮、火炮和迫击炮”(C-RAM)、空中监视及火力支援任务,具备机动或托盘化部署能力。该雷达可跟踪所有类别无人机,并能区分空中与地面目标。KuRFS提供传感与火控能力,通过构建清晰空情图显著提升“高能激光”(HEL)、“电子战对抗设备”(EW effectors)、以及“郊狼武器系统”、“50口径机枪”、“30毫米机炮”、“陆基密集阵武器系统”(LPWS)等反无人机杀伤性武器的毁伤概率。
KuRFS设计支持针对演进威胁环境的升级适应,具备:同时执行多任务能力,提供低成本“近程防空”(SHORAD)解决方案;实现全向半球空域扫描;生成清晰可行动的空情图,可过滤生物体、轻武器火力和地面车辆干扰,最大限度减少误报;由“指挥控制”(C2)操作员远程操控;精确火控能力可延伸武器系统与对抗设备效能;为低成本杀伤性对抗设备(如“郊狼”)提供实时轨迹适配;实现多轴向多威胁攻击防御。
KuRFS雷达家族包含两种构型:“托盘化雷达”用于固定阵地部署,可搭载于中型战术车辆运抵偏远临时区域,为高价值资产和军事设施提供近程防空/反无人机防护;“机动型KuRFS”符合“防雷反伏击全地形车”、“联合轻型战术车辆”等轻型战术车辆的尺寸、重量与功率限制,其探测范围可支持轻型远征部队及小型机动单元作战。

图3. ku波段射频系统(KuRFS)
3.郊狼Block 2C拦截弹
“郊狼Block 2C”是一款可消耗、导轨/发射管发射的“涡轮发动机动力导弹”,用于高速反无人机任务。这种“地空对抗设备”已被验证可有效应对机动小型无人机威胁,具备快速接战能力。该弹通过“KuRFS雷达家族”实施“指挥控制制导”,末段由弹载导引头接管完成打击。“低附带损伤前置喷射破片战斗部”的起爆实现目标摧毁。KuRFS可对拦截弹发射区周边空域实施监控,确保作战空域无己方平台。
该弹可集成于固定站点或移动平台,具备地面发射或车载安装能力。地面发射构型采用“四联装发射器”,车载构型采用“双联装发射器”。通过与“前沿区域防空指挥控制系统”集成,可实现多目标同步拦截,同时发射多枚战斗部。
图4.郊狼Block 2C
4.反遥控模型飞机综合防空网络(CORIAN)
“反遥控模型飞机综合防空网络”(简称CORIAN)是一种能探测、识别、跟踪及压制威胁无人机的反无人机系统。该系统配置多种“电子战能力”实现非杀伤性对抗,包含用于探测、定位及干扰目标库无人机的“被动与主动声呐节点”。
CORIAN系统:提供全天候持续自动化监控;识别跟踪无人机无线电链路,定位禁飞区/保护空域内的无人机操作;可定位无人机地面控制站。“被动传感器”:实现360度视场目标探测与定位;建立“电子围栏侦测边界”;基于三个以上传感器采集数据,通过“到达时差定位技术”生成定位信息,并在“图形用户界面地图”显示概率椭圆。“主动传感器”:通过攻击“指挥控制上行链路”及目标射频波段干扰非Wi-Fi目标;根据启动的攻击模式,可实施单目标精确打击或广域阻塞干扰。
图5.反遥控模型飞机综合防空网络(CORIAN)
5.反简易非国家制空威胁系统(NINJA)
“反简易非国家制空威胁系统”(简称Ninja)是一种基于射频特征库的反无人机系统,可探测、识别、跟踪并压制威胁无人机。该系统通过射频探测、追踪及“电子攻击”(EA)破坏无人机通信。
Ninja具备:被动探测识别跟踪无人机能力;主动压制敌对无人机且不影响己方系统;根据威胁信号协议提供多种压制选项;可独立运行或与“其他Ninja节点”、“兼容电子干扰设备”(如EGON、DRAKE、Duke)及“自主拦截器”组网协同;另配备“机动型Ninja收发系统”和“便携式Ninja背负装备”两种衍生型号。
图6.反简易非国家制空威胁系统(NINJA)
6.铁砧拦截无人机
“铁砧”(Anvil)是一种四旋翼无人机,受系统引导后自主导航拦截潜在威胁无人机。该装备采用“人工智能算法”(AI)与“计算机视觉技术”向操作员提供视觉反馈以实现精确识别。获得授权后,“铁砧”利用物理高速机动及弹载“末制导单元”实施精确打击,实现最小附带损伤。

图7. “铁砧”(Anvil)
7.风语者侦测系统
“风语者”(Windtalker)系统使作战人员具备探测、识别和追踪无人机设备的能力,可远程侦测飞行器及其地面控制站,并识别无人机是否发送有效“敌我识别码”(IFF code)。
该系统操作简便且维护需求低,用户界面通过“云端架构”实现多传感器“态势感知”。作为基于互联网的系统,操作需“安全登录凭证”,确保作战人员在“非密级环境”中安全使用。

图8.“风语者”(Windtalker)系统
8.移动式低慢小无人机综合防御系统(M-LIDS)
“移动式低慢小无人机综合防御系统”(简称M-LIDS)是一种可探测、识别、跟踪和压制无人机威胁的反无人机系统。该系统搭载于两辆“防雷反伏击装甲车”执行短停作战任务,采用“前沿区域防空指挥控制系统”软件及通过“安全通信链路”连接的“任务数据记录仪”。
该系统由“电子战车辆”和“杀伤性对抗车辆”组成:
“电子战车辆”集成“移动式低慢小防御系统”(LIDS)架构,提供“电子探测识别跟踪压制能力”,配备带“光电红外摄像机炮塔系统”(目标捕获距离2公里)的“50口径机枪”用于防护;“杀伤性对抗车辆”具备探测识别跟踪及杀伤能力,集成“郊狼Block 2拦截弹”、“XM914型30口径机枪”和“M240型7.62毫米中型机枪”,同样搭载“光电红外摄像机炮塔系统”(目标捕获距离2公里),并配备可在短停状态下提供“空中监视与火控能力”的“KuRFS机动雷达”。该车辆需在开启“反无线电控制简易爆炸装置系统”(CREW)时与电子战车辆保持50米内距离,且发射时必须清除发射器“轴向±40度角150米扇形区”内所有人员物资。
“前沿区域防空指挥控制系统”(FAAD C2)提供交战操作、航空器规避及防止误伤功能。如前所述,该系统支持与“Link-16数据链”互操作。

图9.移动式低慢小无人机综合防御系统(M-LIDS)
9.高能激光武器
“高能激光武器”(简称HEL)利用纯能量探测、识别和压制无人机威胁。该武器采用“多光谱瞄准系统”发射光束摧毁敌对无人机,整套系统搭载于“北极星MRZR全地形车”。HEL具备:精确打击单个无人机能力;直观的“单人远程操作界面”;支持持续作战的“能源补给能力”;可接收现役“监视跟踪雷达”目标指引;“模块化架构”兼容托盘化或吊舱化集成于多型地面/空中载具。

图10.“高能激光武器”(简称HEL)
10.FIM-92肩射式便携防空系统
“FIM-92便携式防空系统”(MANPADS)“毒刺”是一款“红外制导肩射防空导弹”,可部署对抗固定翼/旋翼航空器及无人机。该系统由发射筒、“电池冷却单元”、可分离握把组件、“瞄准具总成”及独立“敌我识别询问机”组成,全重35磅,需双人操作且具备全天候作战能力。“便携式防空系统能力”包含:可发射“基础型”与“可重编程微处理器1型导弹”无需改装;“握把组件”集成全部“发射前电子设备”及MANPADS专用“敌我识别天线”并可重复使用;“电池冷却单元”包含“热电池”与氩气冷却剂,属消耗品仅支持单次发射;“敌我识别询问机”含敌我识别电子组件及可拆卸电源,兼容美制/北约装备;集成“前沿区域防空指挥控制系统软件”。
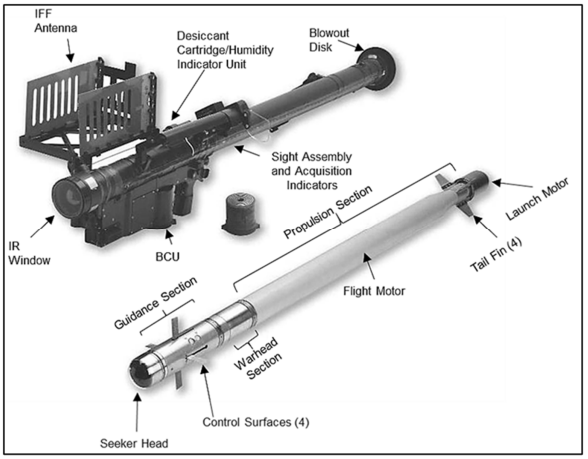
图11.毒刺FIM-92单兵便携式防空系统
11.巴尔查特里侦测系统
“巴尔查特里”(Bal Chatri)是一种“被动射频侦测设备”,用于探测识别威胁无人机。该系统采用“软件定义无线电射频侦测系统”探测敌无人机,可配置为“可穿戴侦测模式”或小型固定站点部署,并能集成如“莫迪系统”的‘反无线电简易爆炸装置电子战系统’。局限在于无自动目标检测跟踪功能,操作员需在系统启动前判定目标大致方位。系统需持续充电保持战备状态。
“巴尔查特里2型”作为升级版被动射频侦测系统提供:多频段组内/组间无线电电池(续航最长4小时);备用电源适配器;“通用串行总线”与无线组网能力;内置告警功能;增强型“发光二极管可见度”且兼容夜视设备;通过“加固设计”满足防尘、浸水、沙尘、震动及冲击/跌落测试标准;支持多配置扩展及多系统对接以提升侦测压制能力;定制硬件含“双通道同步接收”、“高速侦测扫描”(<5秒)及增强探测距离;“频谱分析与归档工具”;同样可集成如“莫迪系统”的反无线电简易爆炸装置电子战系统。
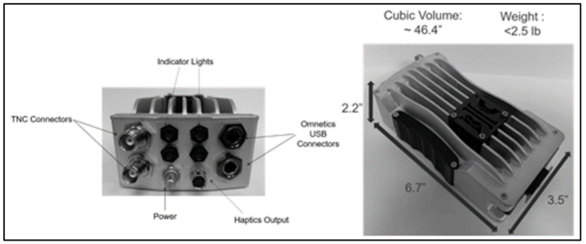
图12.巴尔查特里侦测系统
12.无人机克星干扰仪
“无人机克星”(Dronebuster)提供对威胁无人机的探测压制能力。这款“轻型手持式电池供电电子对抗设备”专为压制无人机设计,单兵即可操作。用户界面通过机身按键和扳机控制,“发光二极管”显示设备状态、电量及前方敌无人机存在信息。该装备利用无人机通信协议漏洞,通过干扰控制信号迫使目标执行预设“失联协议”流程:防御“1/2类无人机”;严格“视距内作战”;操作全程需保持“目标视觉锁定”;若中断视距仍可能重获控制;有效干扰“遥控频段”(915MHz/2.4GHz/5.8GHz)及“定位导航授时”(PNT)制导无人机(有效距离约400米);根据系统设置可同步压制“指挥控制链路”与“定位导航授时链路”;实际效果因无人机飞行模式/能力存在差异。
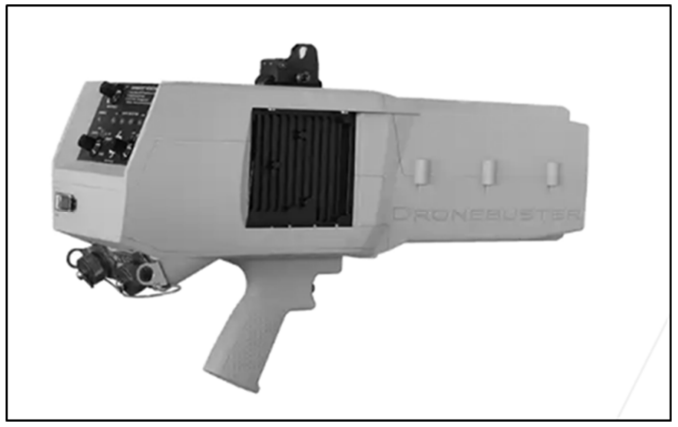
图13.无人机克星干扰仪
13.智能射手火控系统
“智能射手”(Smart Shooter)使操作员具备压制无人机威胁能力。该“导轨安装式智能光电系统”旨在增强反无人机作战效能,兼容现役军用步枪,可安装于武器系统任意导轨。启用时具备:目标锁定、追踪及“火力控制能力”;通过内置计算机与图像处理器实现“按键式精确瞄准”,提供“实时射击解算”及“扳机中断辅助击发”功能;可追踪打击120米内1类无人机;基于“图像处理技术”自动捕获瞄准视场内目标;在“反射式瞄准镜”显示目标锁定框;射手选择锁定目标后,仅当“瞄准轴线校准至可命中位置”(含对移动目标所需“前置量”)时才允许击发。
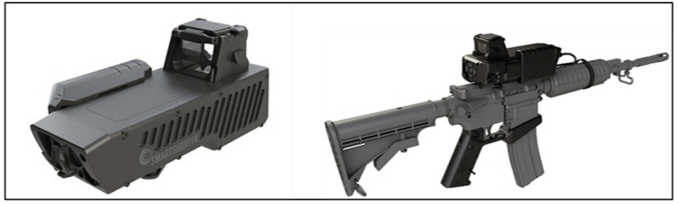
图14.智能射手火控系统
14.Modi电子战系统
Modi是一款“便携式单兵电子战设备”,具备探测压制能力。该系统提供集成“战术电子战能力”应对多种无人机及其他威胁,既可单兵携行使用,也可配合“车载功率放大器”在固定站点或载具平台部署,需要时转为单兵模式。该系统:单兵携行重40.25磅(含背包);工作温域覆盖“-20至60摄氏度”(-4至140华氏度);可集成多种“反无人机系统”和“电子战系统”。

图15.Modi电子战系统
15.前沿区域防空指挥控制系统(FAAD C2)
“前沿区域防空指挥控制系统”是实时“安全关键型指挥控制软件”,提供单一“综合空情态势图”、“空域协同管理”和“火力支援控制”。该系统可与“掩体式”、“手持式”子系统、“ADAM单元”、“美杜莎系统”(美空军)、“复仇者系统”及其他FAAD C2子系统互联,并通过“战场态势显示器”三维可视化显示责任区内航空器动态及空域管制措施。支持任务类型含:“反火箭炮火炮迫击炮拦截陆基密集阵武器系统”;“机动近程防空系统”(M-SHORAD);“低慢小无人机综合防御系统”(LIDS);“复仇者防空系统”。
采用通信体系含:“Link-16数据链”;“Link-11/11B数据链”;“联合跨域扩展应用协议”;“先进战术数据链”;“专用火控网络”。该系统通过“政府专用接口”向交战部队提供基于多传感器数据的空情态势,已集成超25种传感器包括:“AN/MPG-64哨兵雷达”;“AN/TPQ-50轻型反迫击炮雷达”;“AN/TPQ-53反火力目标捕获雷达”;“间瞄火力防护能力”;“高能激光武器”;“高功率微波武器”;“低慢小无人机综合防御系统”;“Ku频段射频系统雷达”;“轻型监视跟踪与捕获雷达”;各类“光电/红外系统”。
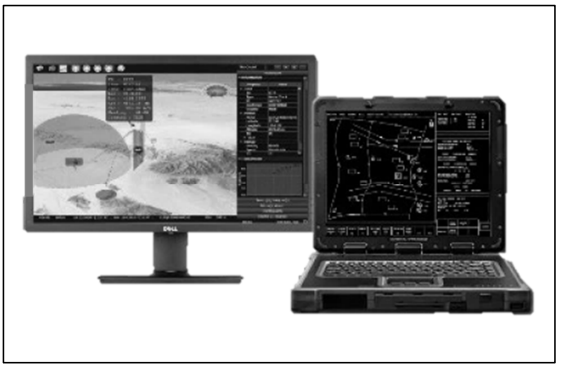
图16.前沿区域防空指挥控制系统(FAAD C2)
16.RAJANT无线网络系统
RAJANT利用无线组网技术构建“网状网络”,具备“移动自组网”、“自愈合”及“安全加密”特性。该系统通过灵活适应性和简易部署确保“宽带无线网络”快速投入各类场景,可作为“独立无线网络”运行,亦可借助“数字用户线路”、“同轴电缆”或“卫星调制解调器”桥接互联网等外部网络。提供远距离“高带宽传输能力”支持视频流、音频流及数据传输,网络流量可通过多重“安全防护机制”加密,是战术部署和关键任务的理想选择(系统组件示例见图)。
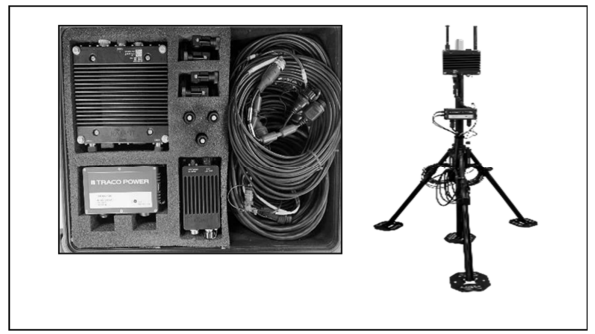
图17.RAJANT无线网络系统

