美国DARPA“分布式作战管理”项目取得阶段性成果
2018 年2 月,BAE 系统公司首次披露“分布式作战管理”项目7 次飞行测试情况,测试验证了作战辅助决策软件在有人-无人机编队协同作战中的应用。
一、项目概况
有人-无人机编队作战是美军未来“体系作战”构想的关键组成部分,但在强对抗环境下,卫星通信和战术数据链可能降效或失效,致使编队协同作战存在较大的不确定性。为此,DARPA 于2014 年2 月发布“分布式作战管理”(DBM)项目跨部门公告,开发可辅助机载战斗管理人员及飞行员管理空对空、空对地作战任务的作战辅助决策软件,确保有人-无人机编队在不能持续稳定通信情况下继续执行作战任务。
DBM 项目涉及系统集成和技术开发两大主要技术领域,在项目两个阶段中并行推进。
第一阶段为期14 个月,聚焦规划和控制、态势感知等。分布式规划与控制方面,将根据机型(指控飞机、战术飞机、无人机)、通信环境、既定任务、敌我力量等制定任务优先级协议。例如,当指控飞机、战术飞机无法通信时,由无人机承担作战任务。分布式态势感知方面,将开发信息管理系统,以评估信息优先级,并将高优先级信息发送至其他平台。人机交互方面,将识别战斗管理人员及飞行员在空对空、空对地作战任务中的具体决策、工作量等。

图1 “分布式战斗管理”项目概念
第二阶段为期30 个月,重点开展系统集成和在虚拟/真实环境下的演示验证。演示验证方面,将构建作战场景和具体作战任务,在虚拟和真实环境下分别开展一次演示验证。软件架构方面,将开发开放式标准,允许集成至各型飞机。人机交互方面,将利用现有的显示器等硬件,使战斗管理人员及飞行员快速理解态势,并有效管理杀伤链。
2015 年初,DARPA 授予BAE 系统公司、洛马公司、查尔斯河分析公司DBM 项目第一阶段合同。
2016 年4~5 月,美国空军研究实验室代表DARPA授出DBM项目第二阶段合同,其中,BAE系统公司获得879 万美元资助,开发基于“网络对抗环境态势理解系统”(Consensus)和“反介入实时任务管理系统”(ARMS)两款软件的分布式作战管理系统,并分别在虚拟和真实环境下的开展测试评估;洛马公司获得1617万美元资助,为分布式作战管理系统提供软硬件等。
二、飞行测试情况
2017 年9 月,DARPA 联合空军研究实验室开展了7次、为期11 天的飞行测试(2018 年2 月首次披露),采用“利尔”喷气公务机充当无人机,采用地面模拟机充当有人机,各平台均装配了BAE 系统公司的“网络对抗环境态势理解系统”和“反介入实时任务管理系统”两款软件,该两款软件是实现作战辅助决策的核心。测试中,处于地面的有人机最先加载作战任务,相关软件将任务分解,部分任务被分配至试验空域内的无人机;当通信意外中断(事后查明,太阳耀斑造成通信中断)后,有人机、无人机按照预先设定继续执行任务。本次飞行测试验证了作战辅助决策软件的半自主性能,及其在空对空作战中的应用。2018 年夏季,将开展空对地作战演示验证。
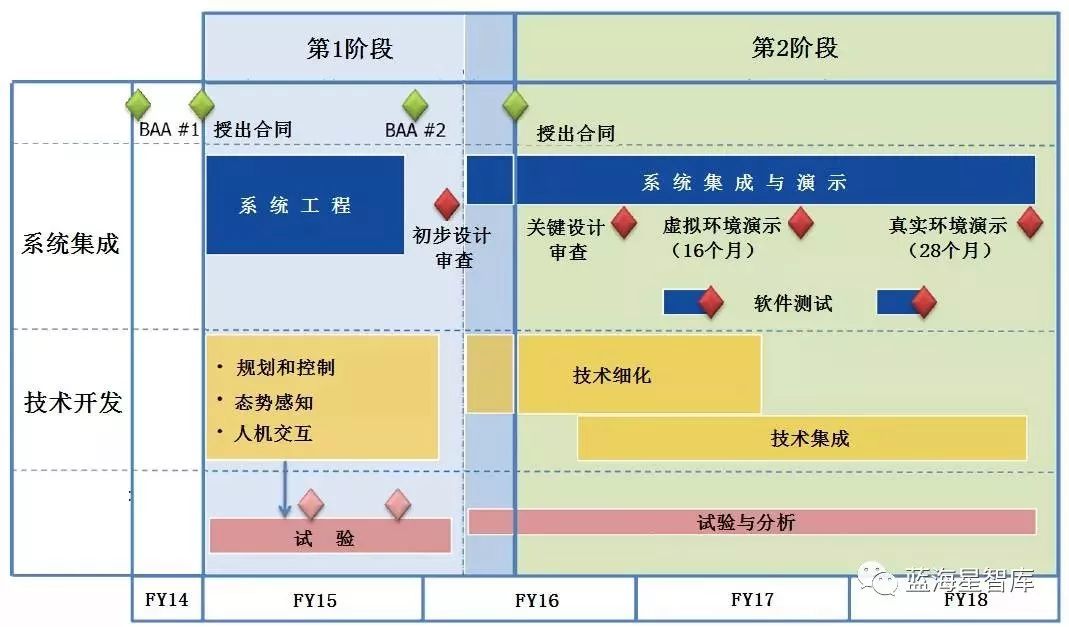
图2 “分布式作战管理”项目组织方式
(1)网络对抗环境态势理解系统
该系统基于“全源追踪与识别融合”(ATIF)技术开发,可融合源自移动目标指示器(MTI )、图像情报(IMINT)、信号情报(SIGINT)等的信息,最终形成通用作战态势图。ATIF技术具备两大优势:一是可确保目标追踪的连续性,减少碎片化信息;二是提升了态势感知能力,即通过信息关联、多渠道确保信息的准确性。
(2)反介入实时任务管理系统
该系统基于“多平台任务控制系统”(M2CS)技术开发,结合通用作战态势图,为各平台规划、分配和控制作战任务。在任务规划方面,软件充分考虑了任务意图、时间、空间和自主能力等;在控制方面,软件支持对航电系统的集中或分散控制。

图3 参与首次飞行测试的地面模拟机
三、结语
近年来,美国主要对手快速推进武器装备现代化建设,而自身武器装备研发又陷入“拖(周期)、降(性能)、涨(成本)”困境,对作战优势构成挑战。为此,DARPA 积极探索分布式空战体系,通过在作战空域整合预警平台、战术飞机、空中发射/回收平台、无人机、导弹、炸弹、电子战吊舱等多型武器装备,分散执行作战任务,实现快速升级、随时入网、实时替换。
2014 年,DARPA 启动“体系综合技术及试验”(SoSITE)项目,聚焦发展分布式空战概念、架构和技术集成工具,目标是将有人战斗机的能力分散至大量具备某一项或某些能力的无人机平台上,并实现平台间实时数据共享、多机组网和协同作战,以及不同任务载荷的即插即用,最终形成分布式空战体系。项目预计2019 年10 月完成。可见,DBM 实质上可认为是DARPA 探索分布式空战体系的支撑项目之一。
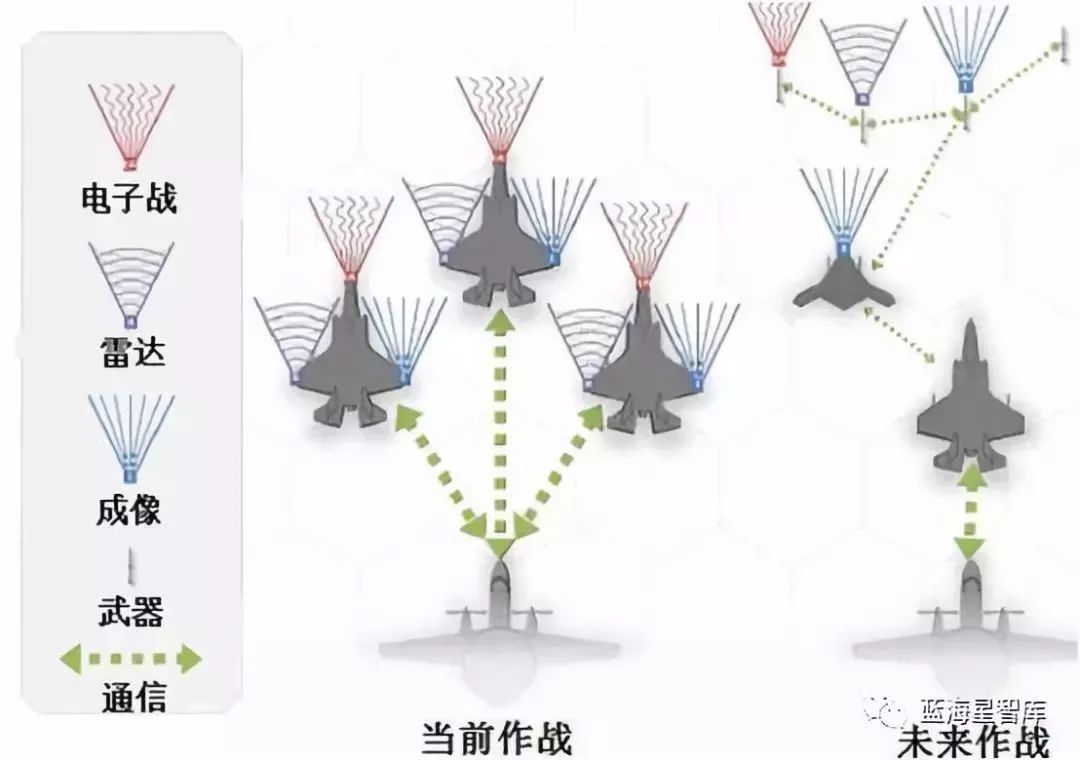
图4 SoSITE 项目概念图
综上,围绕分布式空战,DARPA已在作战管理、体系架构等领域开展了先期研究,正加快推进相关概念的演示验证,有望在2020 年代取得突破。分布式空战强调多型单一任务类型的武器装备的协同作战能力,不再单纯依赖高新复杂装备,可能对未来的空战装备体系和作战模式产生重要影响。
来源丨蓝海星智库
作者丨孙明月 于宪钊

长按识别图中二维码关注我们!






