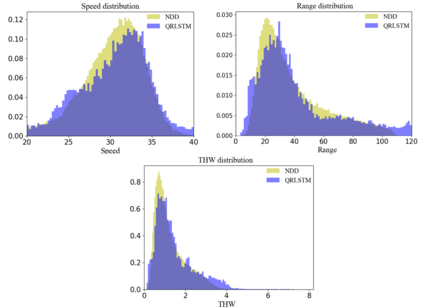
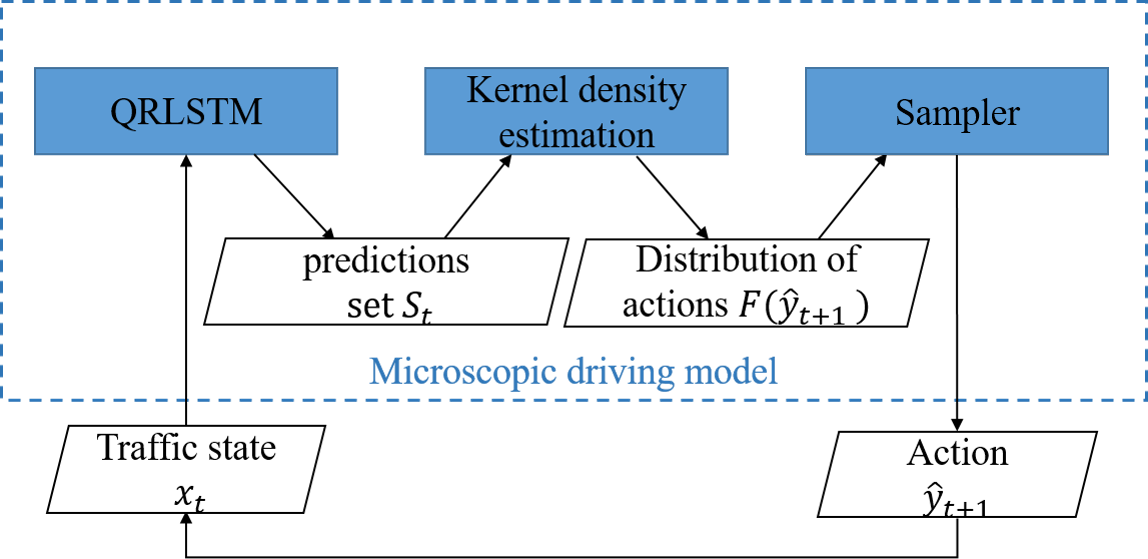
In the simulation-based testing and evaluation of autonomous vehicles (AVs), how background vehicles (BVs) drive directly influences the AV's driving behavior and further impacts the testing result. Existing simulation platforms use either pre-determined trajectories or deterministic driving models to model the BVs' behaviors. However, pre-determined BV trajectories can not react to the AV's maneuvers, and deterministic models are different from real human drivers due to the lack of stochastic components and errors. Both methods lead to unrealistic traffic scenarios. This paper presents a learning-based stochastic driving model that meets the unique needs of AV testing, i.e. interactive and human-like. The model is built based on the long-short-term-memory (LSTM) architecture. By incorporating the concept of quantile-regression to the loss function of the model, the stochastic behaviors are reproduced without any prior assumption of human drivers. The model is trained with the large-scale naturalistic driving data (NDD) from the Safety Pilot Model Deployment(SPMD) project and then compared with a stochastic intelligent driving model (IDM). Analysis of individual trajectories shows that the proposed model can reproduce more similar trajectories to human drivers than IDM. To validate the ability of the proposed model in generating a naturalistic driving environment, traffic simulation experiments are implemented. The results show that the traffic flow parameters such as speed, range, and headway distribution match closely with the NDD, which is of significant importance for AV testing and evaluation.
翻译:在对自动飞行器(AVs)的模拟测试和评估中,背景车辆(BVs)如何驱动直接影响到AV的驱动行为,并进一步影响测试结果。现有的模拟平台使用预先确定的轨迹或确定性驱动模型来模拟BVs的行为。但是,预先确定的BV轨迹无法对AV的动作作出反应,确定性模型与真实的人类驱动器不同,因为缺少随机部件和错误。两种方法都会导致不切实际的交通情况。本文展示了一种基于学习的随机驱动参数,满足AV测试的独特速度需要,即互动和人型。该模型建基于长期短期驱动模型(LSTM)架构。通过将定量回归概念与模型的损失函数功能相结合,随机复制的交通模式与不切实际的交通模式(NDD)匹配。在安全试点测试模型A(SP)的大规模自然驱动模型流流流中,将智能驱动力A(DRD)测试项目和智能驱动力A(SDR) 显示智能驱动力的智能驱动力测试项目。