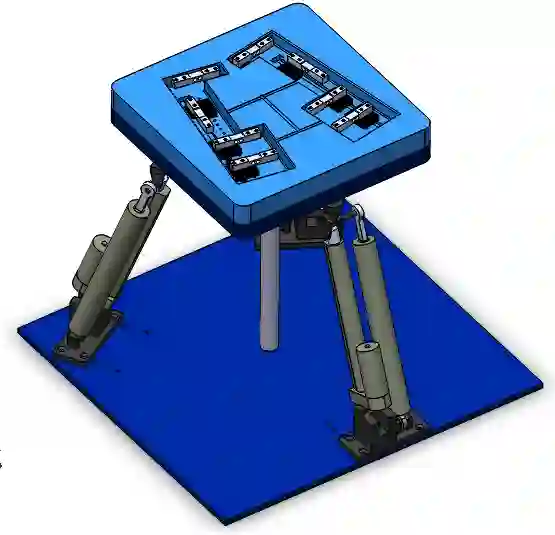
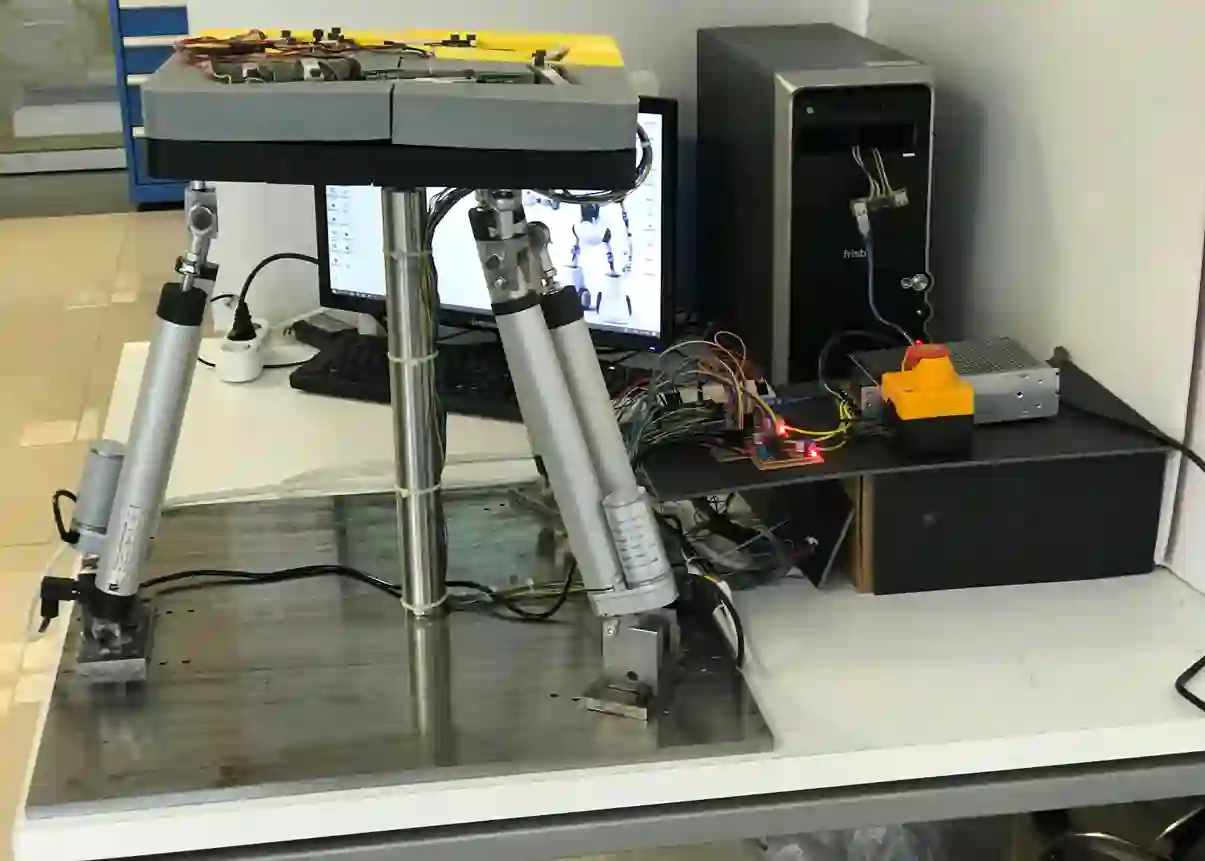
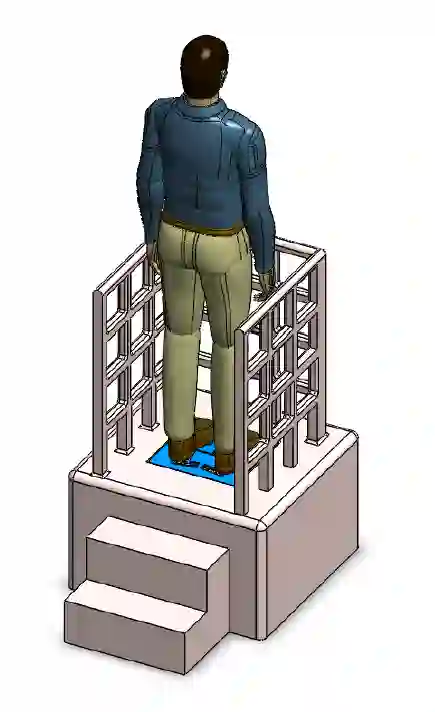
We present the design, implementation, and experimental evaluation of a 3 DOF robotic platform to treat the balance disorder of the patients with MS. The robotic platform is designed to allow angular motion of the ankle based on the anthropomorphic freedom in the space. That being said, such a robot forces patients to keep their balance by changing the angular position of the platform in three directions. The difficulty level of the tasks are determined based on the data gathered from the upper and lower platforms responsible for patients' reaction time against the unexpected perturbations. The upper platform instantaneously provides pressure distribution of each foot, whereas the lower platform simultaneously shares the center of mass of the patient. In this study, the kinematic and dynamic analyses, and simulation of the 3 DOF parallel manipulator is successfully implemented. The control of the proof of concept design is carried out by means of PID control. The working principle of the upper and lower platforms are verified by set of experiments.
翻译:我们展示了3个DOF机器人平台的设计、实施和实验性评估,以治疗有MS的病人的平衡障碍。机器人平台的设计是为了允许脚踝的角动,其基础是空间中的人类形态自由。也就是说,这样的机器人迫使病人通过将平台的角位置改变为三个方向来保持平衡。任务的困难程度是根据负责病人对意外扰动反应的上层和下层平台收集的数据确定的。上层平台即时提供每脚的压力分布,而下层平台同时与病人的重量中心共享。在本研究中,对3 DOF平行操纵器的动态和动态分析以及模拟得到了成功实施。概念设计证据的控制是通过PID控制手段进行的。上层和下层平台的工作原理通过一系列实验得到验证。