
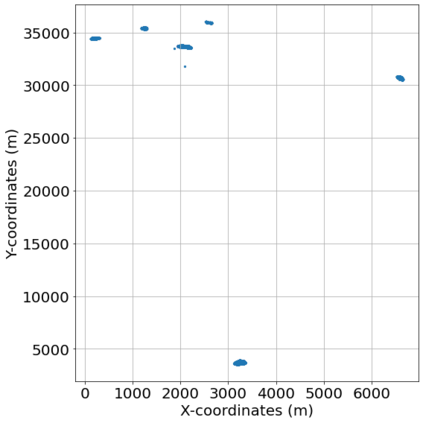
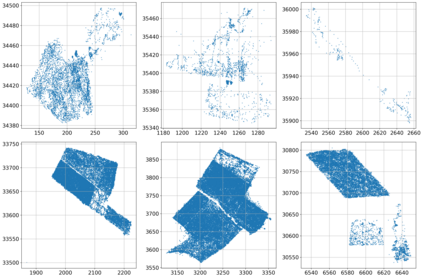
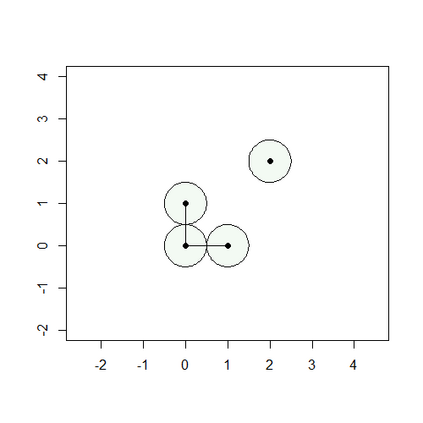
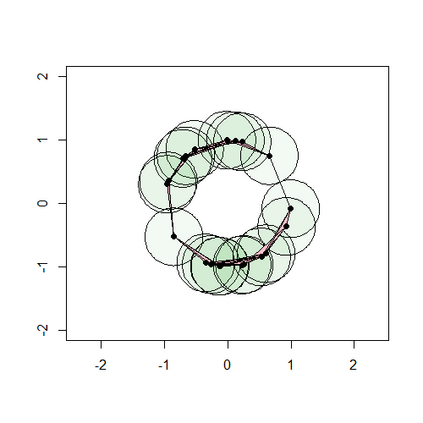
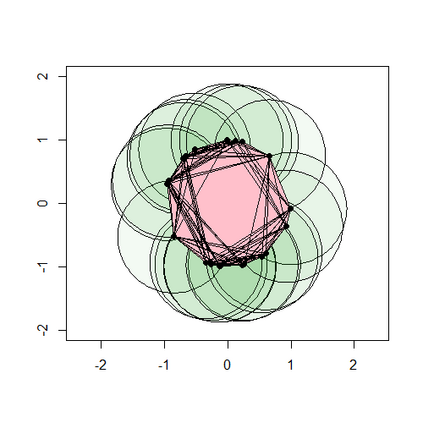
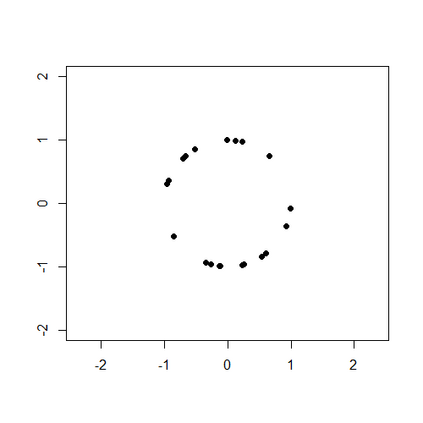
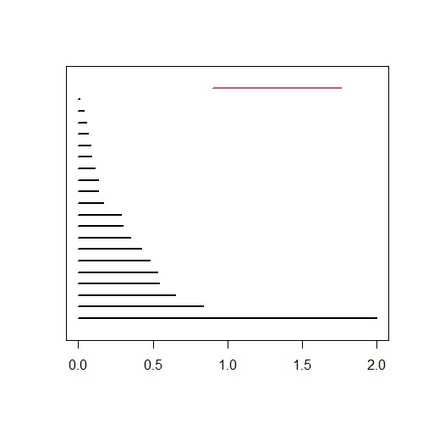
The present paper aims at analyzing the topological content of the complex trajectories that weeder-autonomous robots follow in operation. We will prove that the topological descriptors of these trajectories are affected by the robot environment as well as by the robot state, with respect to maintenance operations. Topological Data Analysis will be used for extracting the trajectory descriptors, based on homology persistence. Then, appropriate metrics will be applied in order to compare that topological representation of the trajectories, for classifying them or for making efficient pattern recognition.
翻译:本文件旨在分析杂草自主机器人所运行的复杂轨迹的地形内容,我们将证明这些轨迹的地形描述符在维护操作方面受到机器人环境以及机器人状态的影响,将使用地形数据分析法根据同系物的持久性来提取轨迹描述符,然后将采用适当的指标来比较轨迹的地形描述、分类或有效模式识别。



相关内容

专知会员服务
11+阅读 · 2020年1月17日
专知会员服务
16+阅读 · 2019年10月2日
Arxiv
0+阅读 · 2021年10月15日
Arxiv
0+阅读 · 2021年10月13日
Arxiv
0+阅读 · 2021年10月13日
Arxiv
0+阅读 · 2021年10月13日
Arxiv
3+阅读 · 2020年3月12日
相关主题




相关VIP内容
专知会员服务
11+阅读 · 2020年1月17日
专知会员服务
16+阅读 · 2019年10月2日
相关资讯
相关论文
Arxiv
0+阅读 · 2021年10月15日
Arxiv
0+阅读 · 2021年10月13日
Arxiv
0+阅读 · 2021年10月13日
Arxiv
0+阅读 · 2021年10月13日
Arxiv
3+阅读 · 2020年3月12日