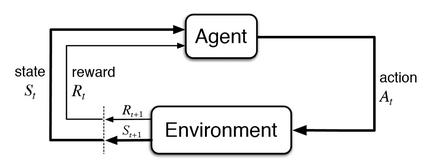
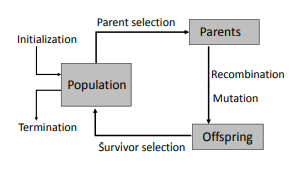
Autonomous driving vehicles have been of keen interest ever since automation of various tasks started. Humans are prone to exhaustion and have a slow response time on the road, and on top of that driving is already quite a dangerous task with around 1.35 million road traffic incident deaths each year. It is expected that autonomous driving can reduce the number of driving accidents around the world which is why this problem has been of keen interest for researchers. Currently, self-driving vehicles use different algorithms for various sub-problems in making the vehicle autonomous. We will focus reinforcement learning algorithms, more specifically Q-learning algorithms and NeuroEvolution of Augment Topologies (NEAT), a combination of evolutionary algorithms and artificial neural networks, to train a model agent to learn how to drive on a given path. This paper will focus on drawing a comparison between the two aforementioned algorithms.
翻译:自各种任务自动化开始以来,自主驾驶车辆一直引起极大兴趣。 人类容易耗竭,在路上反应时间缓慢,而且驾驶已经是一项非常危险的任务,每年约有135万人死于道路交通事故。预计自主驾驶可以减少世界各地驾车事故的数量,这也是研究者对该问题非常感兴趣的原因。目前,自驾车辆在使车辆自主的过程中使用不同的算法处理各种子问题。我们将侧重于强化学习算法,更具体地说,即Q-学习算法和突变形态神经进化(NEAT),这是进化算法和人工神经网络的结合,目的是训练一名示范代理人,学习如何在特定道路上驾驶。本文将侧重于对上述两种算法进行比较。