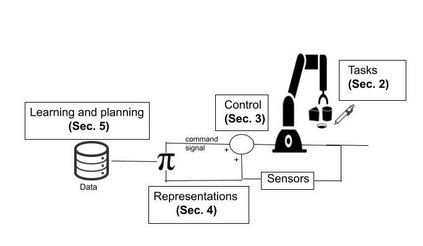
In this survey we present the current status on robots performing manipulation tasks that require varying contact with the environment, such that the robot must either implicitly or explicitly control the contact force with the environment to complete the task. Robots can perform more and more manipulation tasks that are still done by humans, and there is a growing number of publications on the topics of 1) performing tasks that always require contact and 2) mitigating uncertainty by leveraging the environment in tasks that, under perfect information, could be performed without contact. The recent trends have seen robots perform tasks earlier left for humans, such as massage, and in the classical tasks, such as peg-in-hole, there is more efficient generalization to other similar tasks, better error tolerance, and faster planning or learning of the tasks. Thus, in this survey we cover the current stage of robots performing such tasks, starting from surveying all the different in-contact tasks robots can perform, observing how these tasks are controlled and represented, and finally presenting the learning and planning of the skills required to complete these tasks.
翻译:在本次调查中,我们展示了从事需要与环境有不同接触的操纵任务的机器人的现状,因此机器人必须隐含或明确控制与环境的接触力量,以完成这项任务;机器人可以执行更多的由人类仍然从事的操纵任务,关于以下主题的出版物越来越多:(1) 执行始终需要接触的任务;(2) 通过利用环境来减轻不确定性,在完全知情的情况下,可以不接触地执行的任务;最近的趋势已经看到机器人执行以前遗留给人类的任务,例如按摩;以及典型的任务,例如插孔等,对其他类似的任务有更有效率的概括化,更好的错误容忍度,以及更快地规划或学习任务。因此,在本次调查中,我们从调查所有不同的接触任务开始,观察这些任务是如何控制和代表的,最后介绍完成这些任务所需的技能的学习和规划。