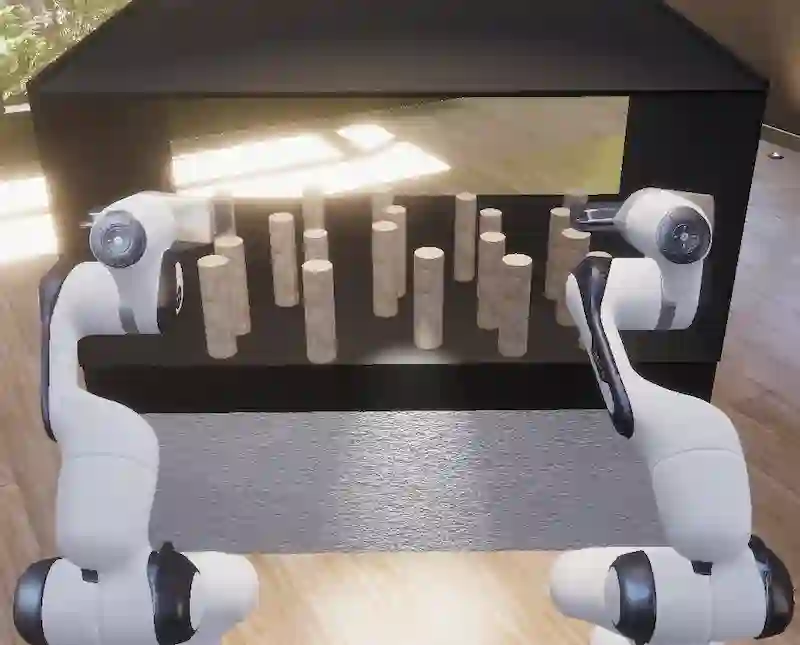
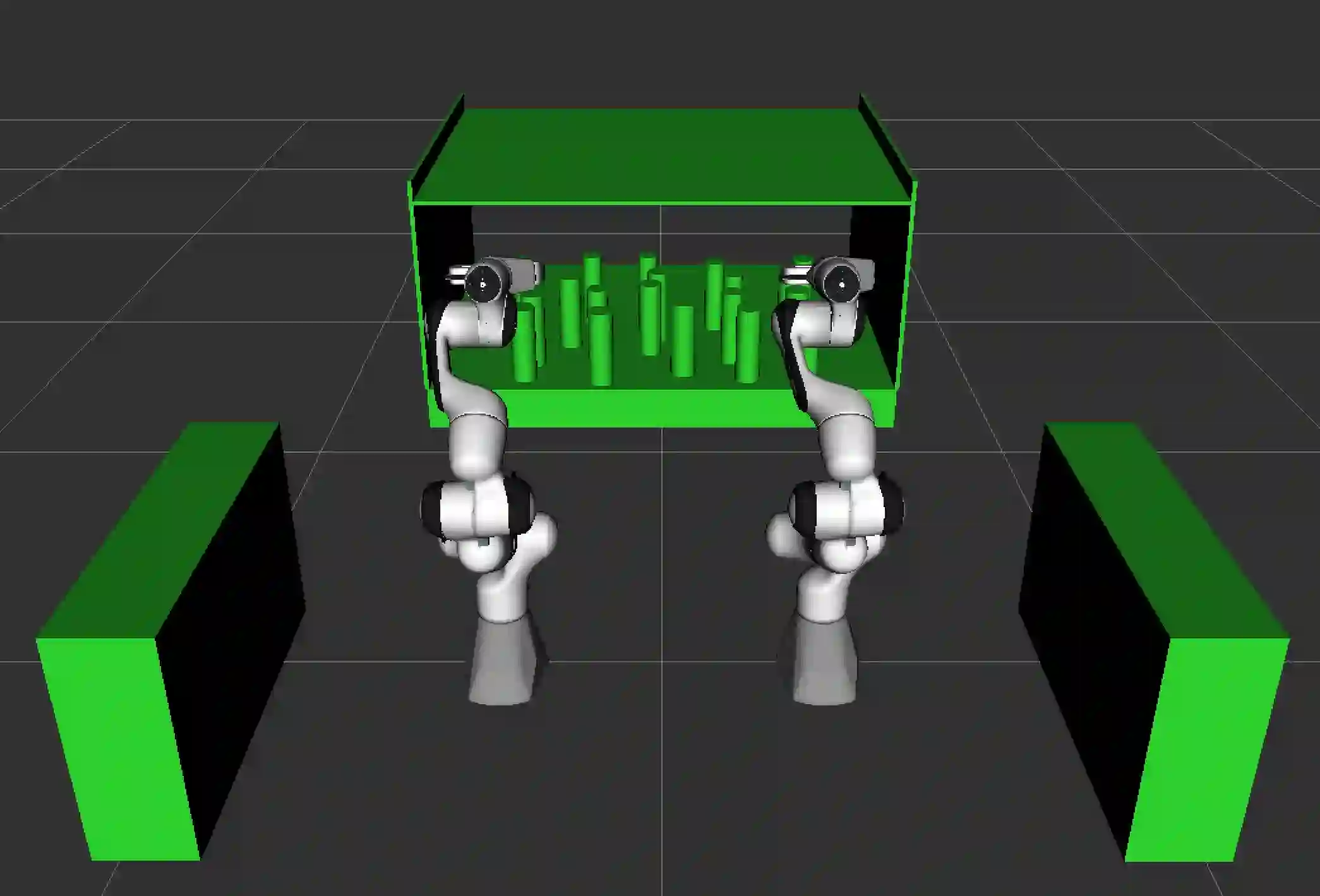
We consider the problem of retrieving a target object from a confined space by two robotic manipulators where overhand grasps are not allowed. If other movable obstacles occlude the target, more than one object should be relocated to clear the path to reach the target object. With two robots, the relocation could be done efficiently by simultaneously performing relocation tasks. However, the precedence constraint between the tasks (e.g, some objects at the front should be removed to manipulate the objects in the back) makes the simultaneous task execution difficult. We propose a coordination method that determines which robot relocates which object so as to perform tasks simultaneously. Given a set of objects to be relocated, the objective is to maximize the number of turn-takings of the robots in performing relocation tasks. Thus, one robot can pick an object in the clutter while the other robot places an object in hand to the outside of the clutter. However, the object to be relocated may not be accessible to all robots, so taking turns could not always be achieved. Our method is based on the optimal uniform-cost search so the number of turn-takings is proven to be maximized. We also propose a greedy variant whose computation time is shorter. From experiments, we show that our method reduces the completion time of the mission by at least 22.9% (at most 27.3%) compared to the methods with no consideration of turn-taking.
翻译:我们考虑由两个机器人操纵器从一个封闭的空间从一个封闭的空间检索目标对象,不允许有过手抓住。 如果其他移动障碍使目标锁定目标, 不止一个对象应该被移动, 以清除到达目标对象的道路。 如果有两个机器人, 迁移可以同时执行迁移任务, 效率可以有效完成。 但是, 任务之间的优先限制( 例如, 前方的一些物体应该被移动以在后面操纵对象) 使得任务执行困难。 我们建议一种协调方法, 确定哪个机器人会迁移, 以便同时执行任务 。 如果其他移动障碍将锁定目标, 目标应该被移动到一个目标 。 如果其他移动器同时执行迁移任务, 一个机器人可以同时执行迁移任务。 但是, 任务之间的优先限制( 例如, 前方的一些物体应该被移到后面的物体) 。 我们的方法是以最佳的统一成本搜索为基础, 这样可以同时执行任务的数量。 鉴于一组要迁移的物体需要搬迁, 目标是最大限度地增加机器人的转折数。 因此, 一个机器人可以在悬崖中选择一个物体, 我们也可以在最短的时间里选择一个比22个模型。