
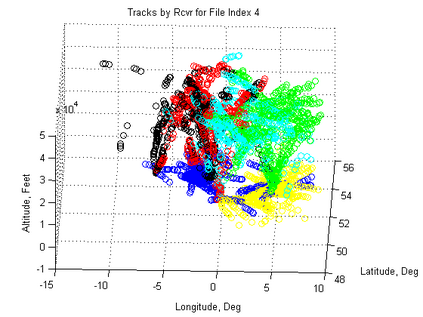
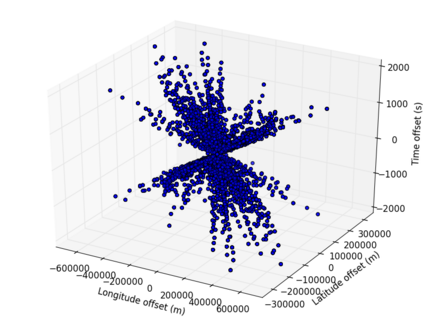
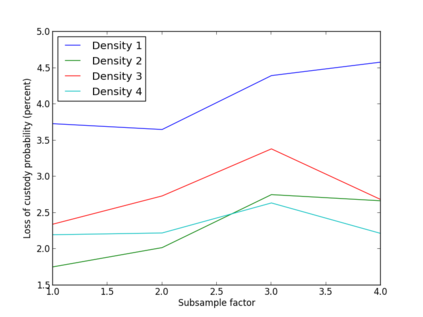
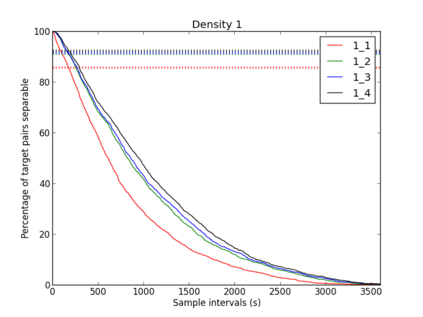
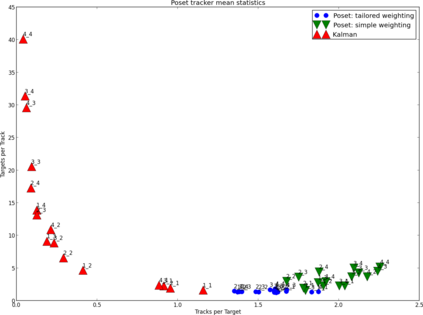
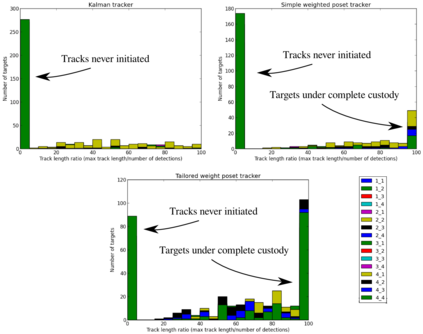
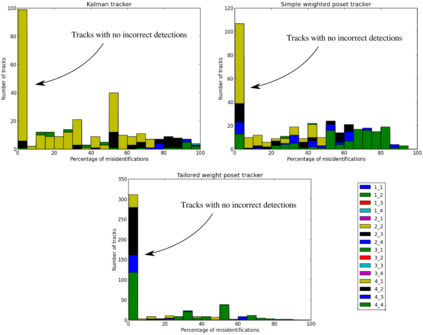
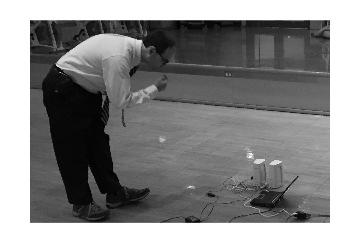
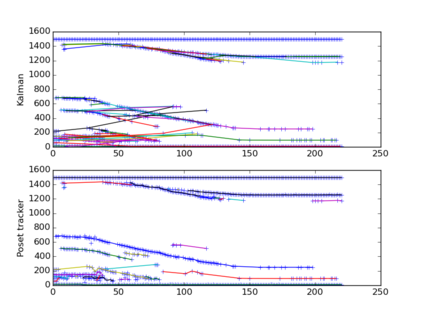
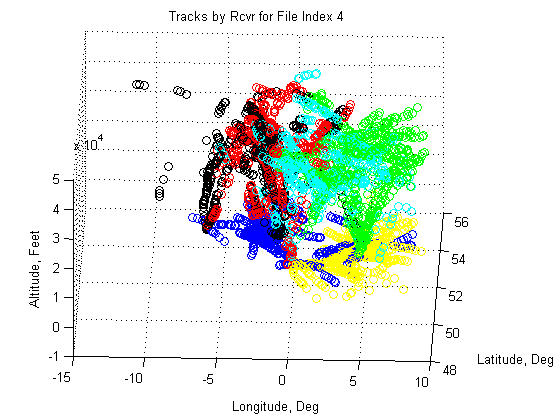
This article addresses the problem of multi-object tracking by using a non-deterministic model of target behaviors with hard constraints. To capture the evolution of target features as well as their locations, we permit objects to lie in a general topological target configuration space, rather than a Euclidean space. We obtain tracker performance bounds based on sample rates, and derive a flexible, agnostic tracking algorithm. We demonstrate our algorithm on two scenarios involving laboratory and field data.
翻译:暂无翻译



相关内容

专知会员服务
36+阅读 · 2019年10月17日
Arxiv
0+阅读 · 2024年3月4日
Arxiv
0+阅读 · 2024年3月4日
Arxiv
0+阅读 · 2024年3月1日


相关VIP内容
专知会员服务
36+阅读 · 2019年10月17日
相关资讯