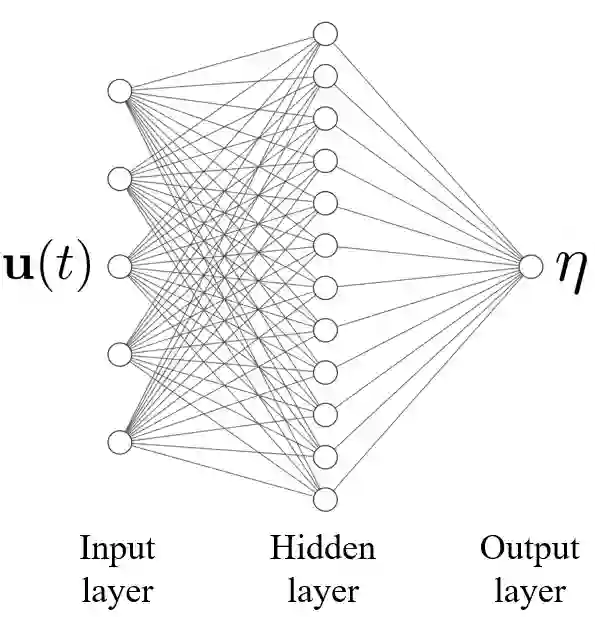
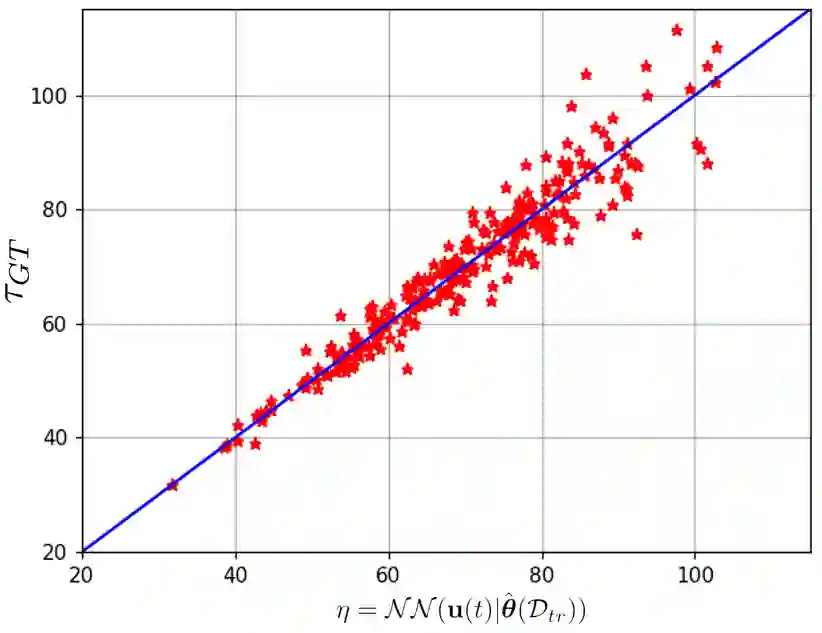
Various engineering systems such as naval and aerial vehicles, offshore structures, and mechanical components of motorized systems, are exposed to fatigue failures due to stochastic loadings. Methods for early failure prediction are essential for engineering, military, and civil applications. In addition to the prediction of time to failure (TtF), uncertainty quantification (UQ) is of major importance for real-time decision-making purposes. Usually, time domain or frequency domain methods are used for fatigue prediction, such as rainflow counting and Miner's rule or Dirlik's method. However, those methods suffer from over-simplistic modeling and inaccurate failure predictions under stochastic loadings. During the last years, several data-driven models were suggested for offline fatigue failure. However, most of them are not capable of both accurate real-time fatigue prediction and UQ. In the current work, a probabilistic data-driven model is introduced. A hybrid architecture of a fully-connected artificial neural network (FC-ANN) and Gaussian process regression (GPR) is proposed to ensure enhanced predictive abilities and simultaneous UQ of the predicted TtF. The real-time prediction and UQ performances of the suggested model are validated using both synthetic and experimental data. This novel hybrid method is fully data-driven and extends the forecasting capabilities of existing time-domain and machine learning-based methods for fatigue prediction. It paves the way towards the development of a preventive system that provides real-time safety and operational instructions and insights for structural health monitoring (SHM) purposes, allowing prevention of environmental damage, and loss of human lives.
翻译:各种工程系统,如海军和航空飞行器、离岸结构以及机动系统机械部件,都暴露于因杂乱装货而导致的疲劳状态; 早期故障预测方法对于工程、军事和民用应用至关重要; 除了预测出故障时间(TF)之外,不确定性量化(UQ)对于实时决策至关重要; 通常使用时间域或频率域方法来预测疲劳状态,如雨水流计和Miner规则或Dirlik方法; 然而,这些方法由于过度简单模型的模型化和在随机直观装货中不准确的故障预测而受到影响; 在过去几年中,提出了若干数据驱动模型用于脱线疲劳状态(TF), 然而,大多数数据无法准确实时疲劳预测和UQ。 在目前的工作中,引入了一种概率性数据驱动模型。 一个完全连接的人工神经网络(FC-ANN)和Gaulsian进程回归(GPR)的混合结构架构,目的是确保增强预测性能力,同时使用IM路面系统进行结构性预测,并用IM-RO-RO-ROS 数据全面预测方法, 提供目前预测性机算数据。