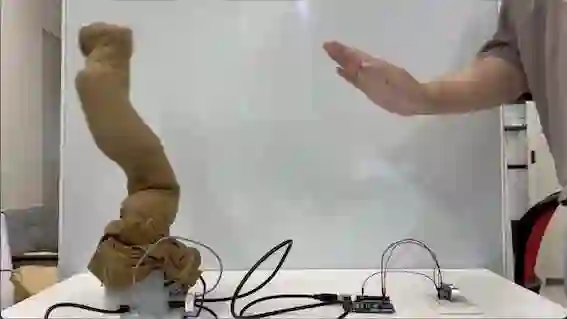
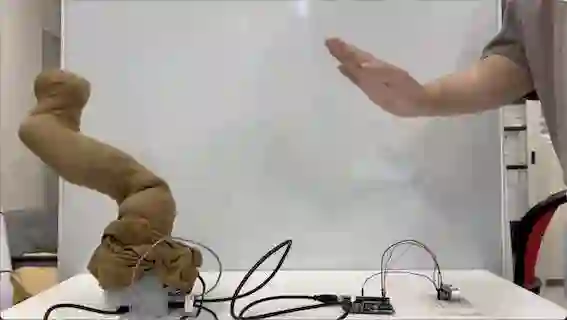
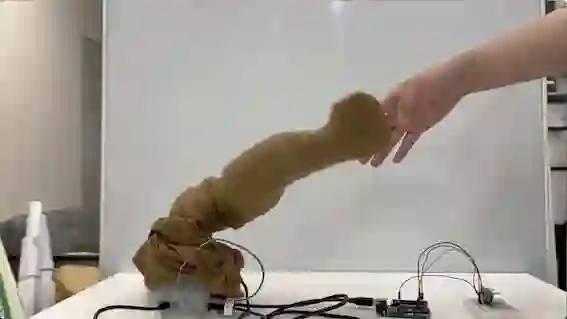
Human-robot interaction frequently involves physical proximity or contact. In human-human settings, people flexibly accept, reject, or tolerate such approaches depending on the relationship and context. We explore the design of a robot's rejective internal state and corresponding avoidance behaviors, such as withdrawing or pushing away, when a person approaches. We model the accumulation and decay of discomfort as a function of interpersonal distance, and implement tolerance (endurance) and limit-exceeding avoidance driven by the Dominance axis of the PAD affect model. The behaviors and their intensities are realized on an arm robot. Results illustrate a coherent pipeline from internal state parameters to graded endurance motions and, once a limit is crossed, to avoidance actions.
翻译:人机交互常涉及物理接近或接触。在人与人交互的场景中,个体会根据关系与情境灵活地接受、拒绝或容忍此类接近行为。本研究探索了当人接近时,机器人拒绝性内部状态及相应回避行为(如后撤或推离)的设计。我们将不适感的积累与衰减建模为人际距离的函数,并基于PAD情感模型的支配轴实现了容忍(耐受)与超限回避行为。这些行为及其强度通过机械臂机器人实现。结果表明,从内部状态参数到分级耐受动作,再到超限后的回避行动,形成了一个连贯的行为生成流程。